汽车ECU BootLoader开发:基于CAN总线与MPC57XX系列MCU
汽车ECU BootLoader开发基于CAN总线通信MPC57XX系列MCU bootloader开发 文档54页
在汽车电子领域,ECU(Electronic Control Unit)的重要性不言而喻,而BootLoader则是ECU中关键的一环。今天咱们就来聊聊基于CAN总线通信,利用MPC57XX系列MCU进行BootLoader开发的那些事儿。
CAN总线在BootLoader中的角色
CAN(Controller Area Network)总线因其高可靠性、高速数据传输和多主通信的特性,在汽车电子系统中被广泛应用。在BootLoader开发里,CAN总线主要负责上位机(如诊断设备或编程工具)与ECU之间的数据传输。比如,当我们要对ECU进行软件更新时,新的程序代码就通过CAN总线从上位机发送到ECU的BootLoader中。
汽车ECU BootLoader开发基于CAN总线通信MPC57XX系列MCU bootloader开发 文档54页
下面是一段简单的CAN初始化代码示例(基于MPC57XX系列MCU的部分寄存器操作,伪代码形式):
// 定义CAN控制器相关寄存器地址
#define CAN_CTL1_REG (*(volatile unsigned int *)0xXXXX)
#define CAN_BAUD_REG (*(volatile unsigned int *)0xYYYY)
void can_init(void) {
// 配置波特率
CAN_BAUD_REG = 0x1234; // 示例波特率配置值,实际需根据需求计算
// 使能CAN控制器
CAN_CTL1_REG |= (1 << 0);
}这段代码主要做了两件事,首先配置了CAN总线的波特率,波特率的正确设置非常关键,它决定了数据传输的速度和稳定性。不同的汽车应用场景可能需要不同的波特率,比如一些对实时性要求高的控制信号传输可能需要较高的波特率。然后通过对控制寄存器的操作使能了CAN控制器,这样CAN控制器就准备好接收和发送数据了。
MPC57XX系列MCU特性与BootLoader开发
MPC57XX系列MCU专为汽车应用设计,具备丰富的片上资源和高性能处理能力。它有强大的内存管理单元、多个通信接口等,这为BootLoader开发提供了很好的硬件基础。
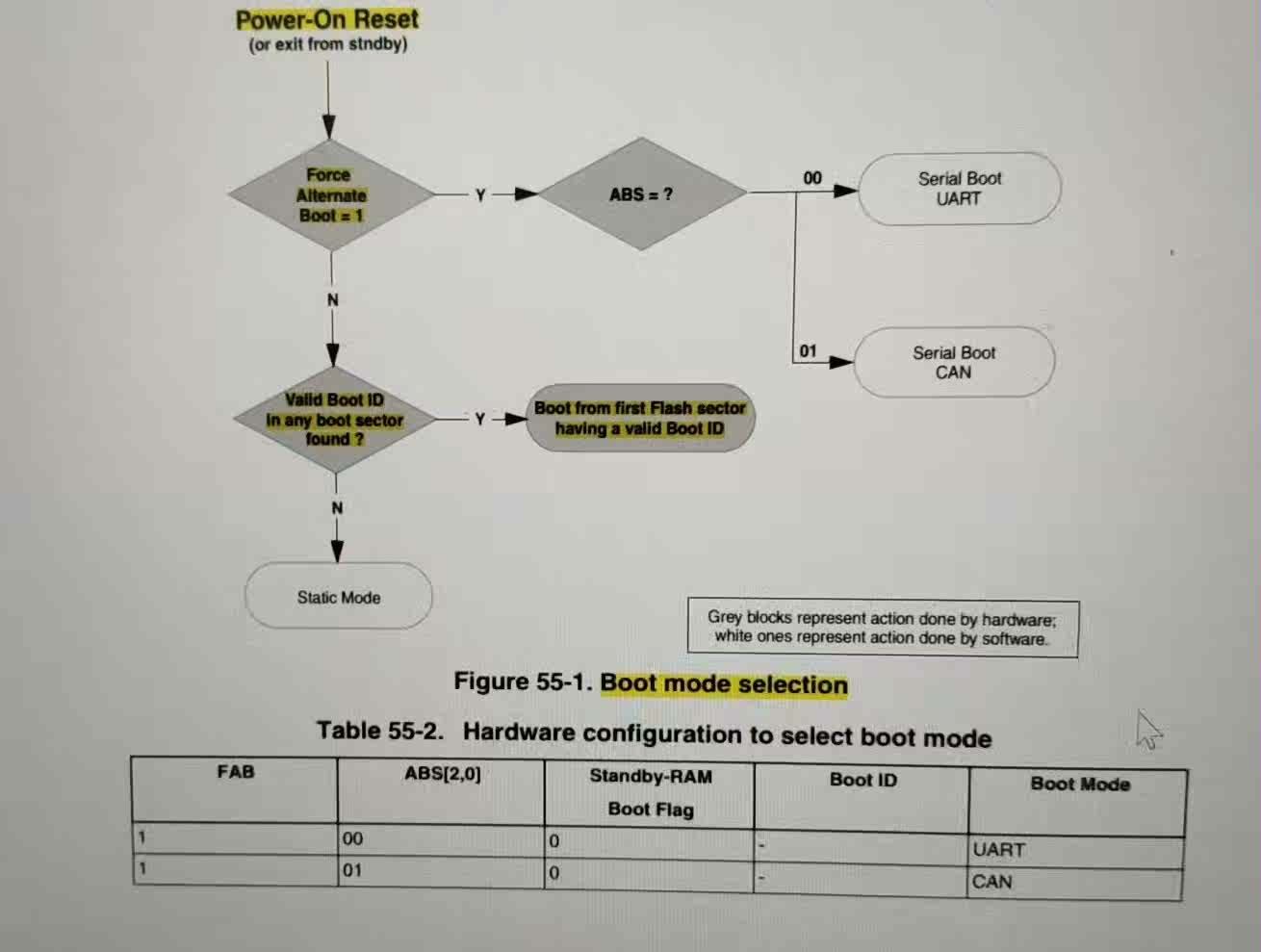
在BootLoader开发中,我们需要合理利用其内存空间。例如,MPC57XX系列MCU有Flash存储器用于存储程序代码,我们在开发BootLoader时要考虑如何在Flash中划分区域,一部分用于存储BootLoader自身代码,另一部分则用于存储应用程序代码。
// 简单示意Flash擦除操作代码
void flash_erase(unsigned int address) {
// 解锁Flash操作
*(volatile unsigned int *)0xZZZZ = 0xABCD;
// 执行擦除命令
*(volatile unsigned int *)address = 0x0001;
// 等待擦除完成
while(*(volatile unsigned int *)address & (1 << 15));
// 锁定Flash操作
*(volatile unsigned int *)0xZZZZ = 0x0000;
}这段代码展示了对Flash进行擦除操作的过程。首先要解锁Flash操作,否则无法对其进行擦写。解锁后向特定地址发送擦除命令,然后等待擦除完成标志位被置位,最后重新锁定Flash,以防止误操作。在BootLoader开发中,Flash的擦写操作常用于更新应用程序代码。
BootLoader开发流程中的关键步骤
- 初始化阶段:除了前面提到的CAN总线初始化,还需要对MCU的其他关键模块进行初始化,如时钟、中断等。时钟配置影响整个系统的运行频率,合理的中断设置能确保BootLoader在接收CAN数据等操作时不会错过重要事件。
- 通信处理:通过CAN总线接收上位机发送的指令和数据。这就需要编写CAN接收中断处理函数,在中断中解析接收到的数据,判断是程序更新指令还是其他诊断相关命令。
void can_rx_isr(void) {
unsigned int data;
// 读取CAN接收寄存器数据
data = *(volatile unsigned int *)0xWWWW;
// 简单数据解析示例,如果数据第一位是1,表示程序更新指令
if(data & (1 << 0)) {
// 执行程序更新相关操作
start_program_update();
}
}- 程序更新:当接收到程序更新指令后,将通过CAN总线传输过来的新程序代码存储到指定的Flash区域。这里涉及到Flash的写入操作,要确保写入的正确性和完整性。
基于CAN总线通信和MPC57XX系列MCU的BootLoader开发是一个复杂但又极具挑战性的工作,它对于提升汽车ECU的功能和可维护性有着重要意义。通过合理利用硬件资源,精心编写代码,我们能打造出稳定可靠的汽车ECU BootLoader。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)