当双馈风机玩起“磁链魔术
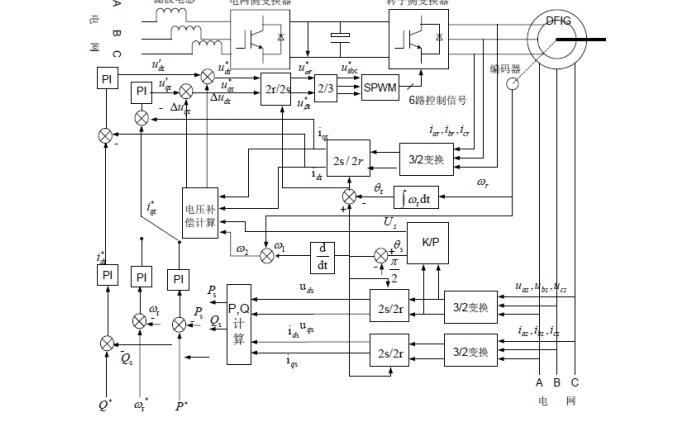
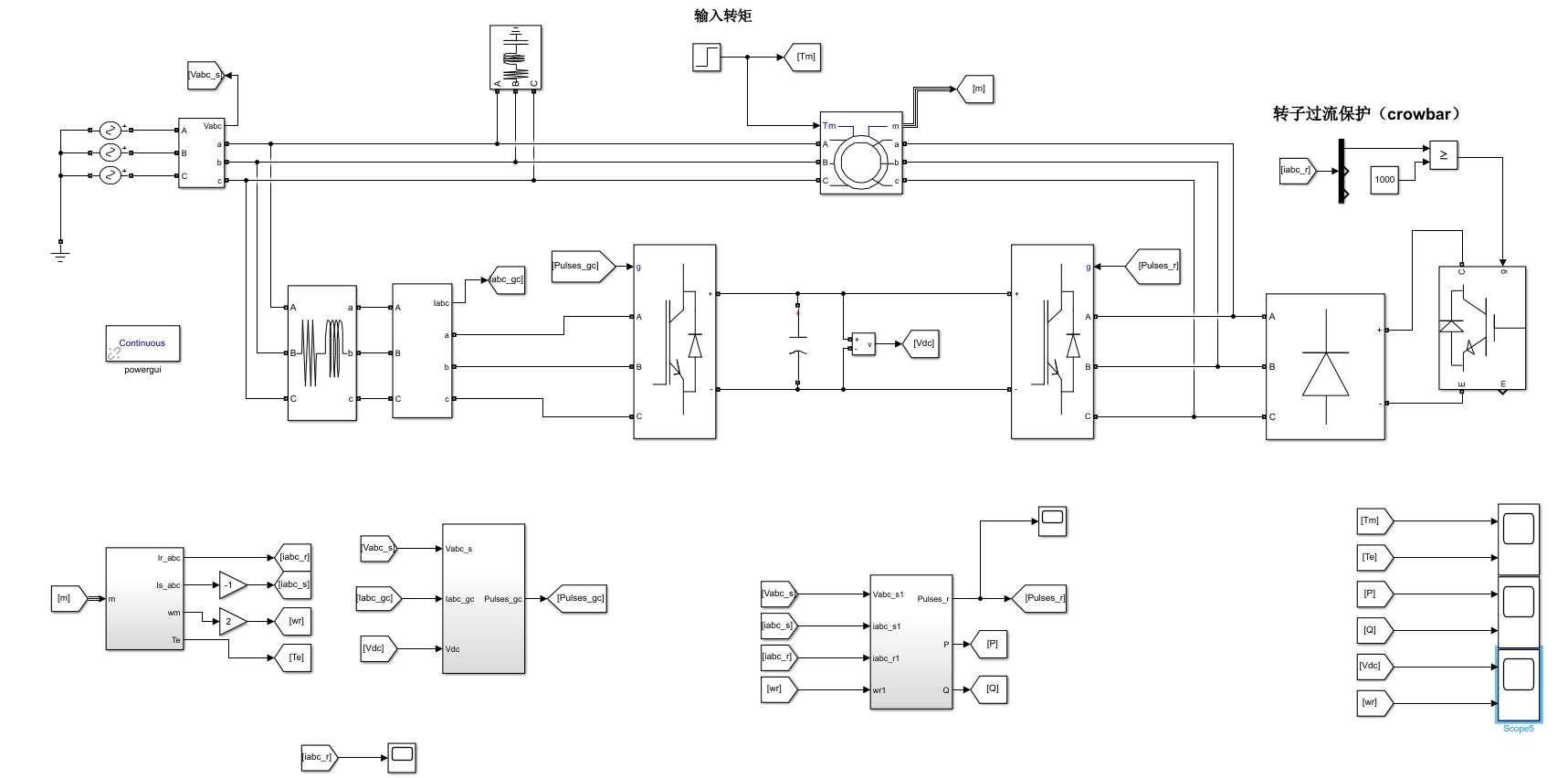
双馈风力发电系统,双pwm变换器控制系统,采用直接转矩输入代替风力发电机。 (1)转子侧采用基于定子磁链定向的矢量控制策略,对d轴进行定向,采用双闭环控制结构,外环为速度环,内环为电流控制环。 (2)网侧采用基于dq解耦直接功率控制,使转子侧以单位功率因数消耗能量,功率因数为1。 (3)右侧加了转子电流过流保护电路(crowbar),并设置了一些参数突变,以便研究了双馈风力发电机在外界干扰下各转矩、功率、电压等波形变化。 附带说明以及参考文献。
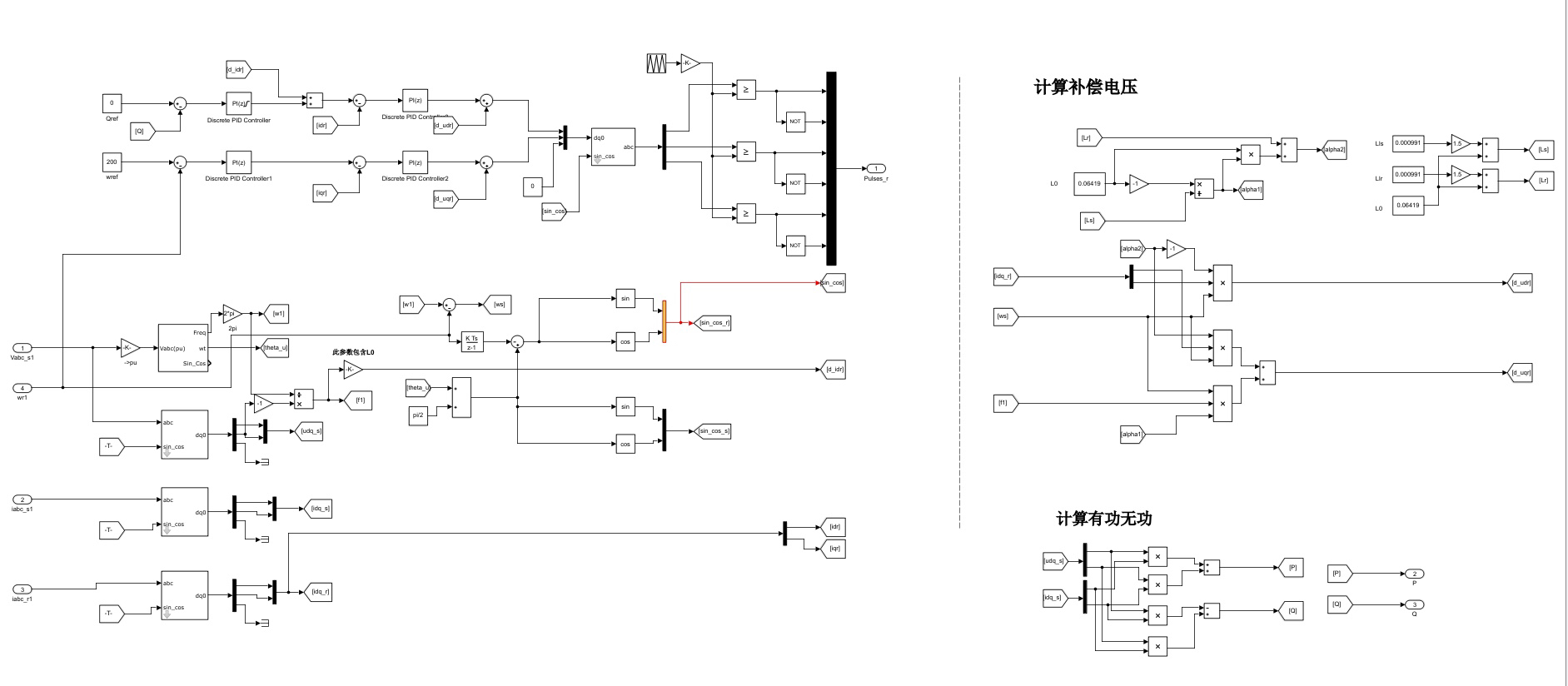
在双馈风力发电系统里玩控制策略,就像给旋转机械装上了电子神经。咱们今天要聊的这套双PWM变换器系统,直接把传统齿轮箱的机械传动关系变成了电磁场的博弈。
先看转子侧这套基于定子磁链定向的矢量控制。定子磁链的d轴定向可不是随便选的——这相当于给整个磁场坐标系安了个指南针。外环速度环负责跟电网频率"对表",内环电流环则像精准的电流管家。我常跟学生说,这里有个隐藏的"电流密码":
% 转子侧电流环PI参数
Kp_id = 2.5; //比例项别手软
Ki_id = 1500; //积分项要猛
Current_controller = pid(Kp_id, Ki_id);这个参数设定背后的门道在于:定子磁链定向后,d轴电流直接决定转矩输出。积分项设得大是为了快速吃掉电网电压扰动,但得小心别让电流环震荡。调试时记得盯着示波器里的电流波形,像在跳电子芭蕾。
网侧控制更是讲究。直接功率控制玩的是功率流平衡术,单位功率因数的要求就像在钢丝上耍杂技。这里有个经典解耦公式:
P = 1.5*(v_d*i_d + v_q*i_q)
Q = 1.5*(v_q*i_d - v_d*i_q)但实际代码里,我们更关注直流母线这个"能量蓄水池"的稳定。在Simulink里搭模型时,网侧变换器的电压前馈补偿模块是关键:
# 伪代码示例
def grid_side_control():
udc_ref = 1200 # 直流母线目标值
P_ref = udc_ref**2 / R_load # 能量守恒的魔法
q_ref = 0 # 功率因数1的核心设定
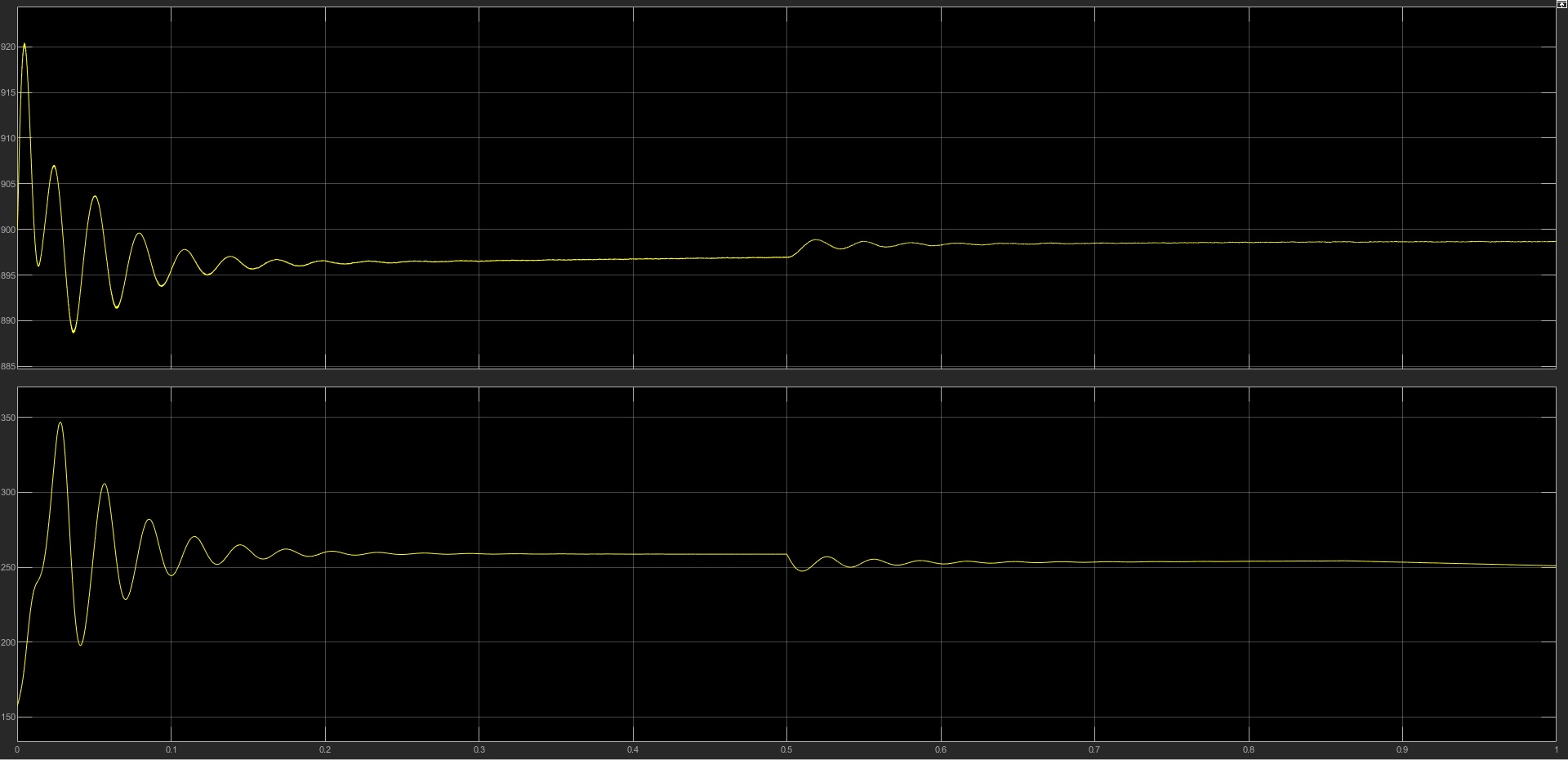
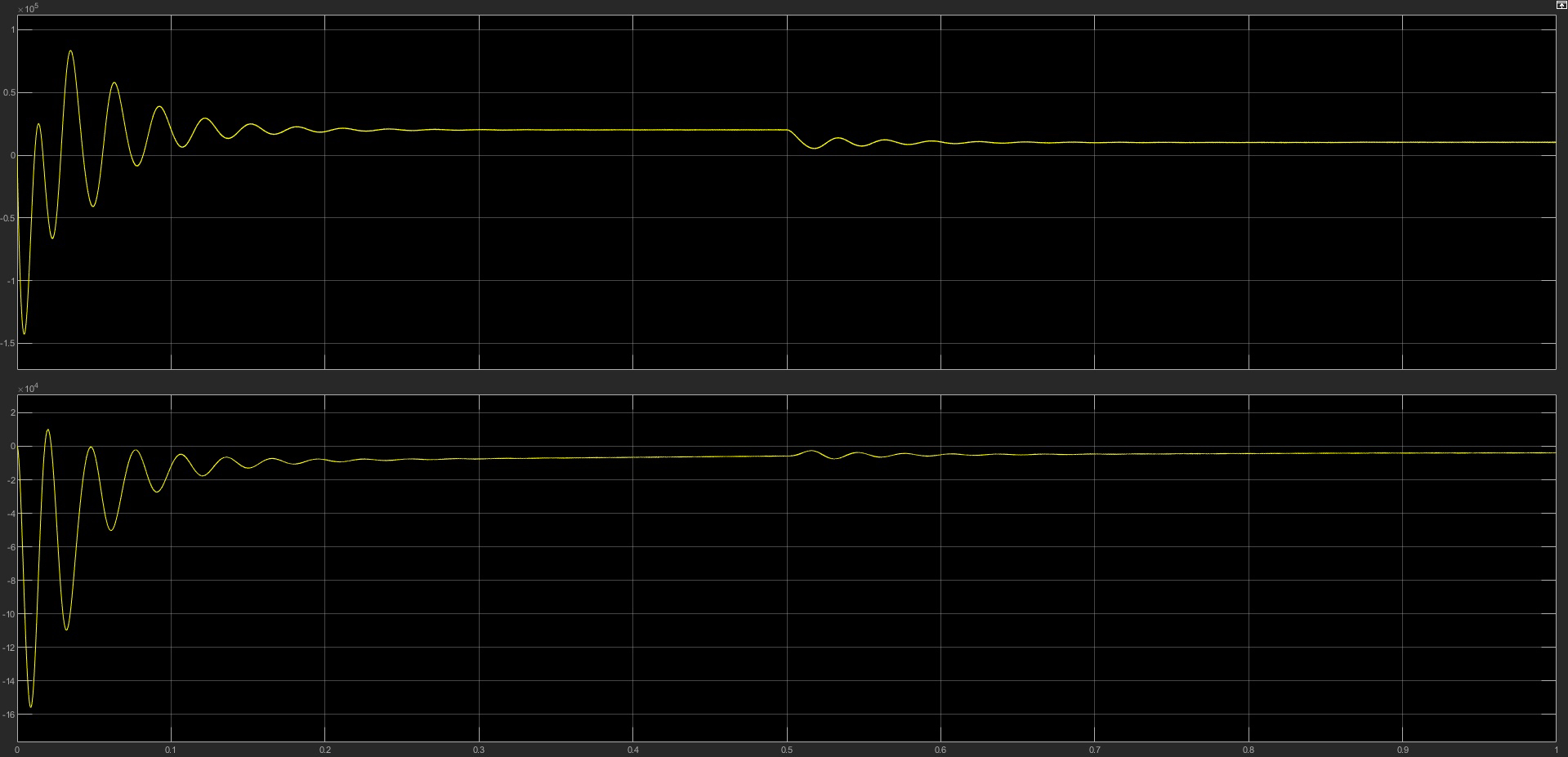
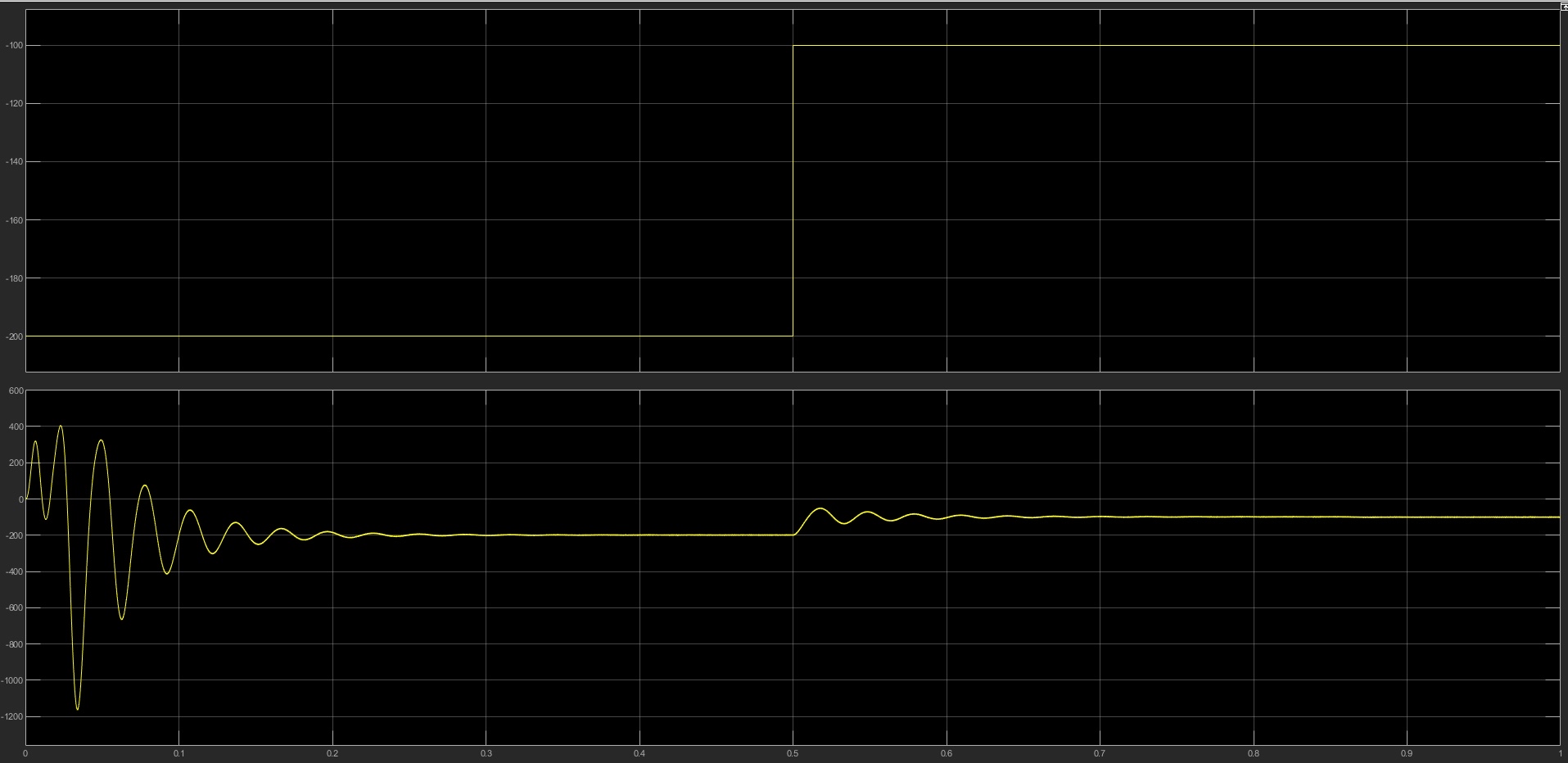
# ...解耦运算...说到crowbar保护电路,这简直是系统里的"安全气囊"。某次实验中,我们故意让风速从8m/s突变到12m/s。没加crowbar时,转子电流瞬间飙到2.3倍额定值,转矩曲线像过山车。加了保护后,电流钳制在1.2倍,但要注意触发延迟设置——太灵敏会影响正常运行,太迟钝可能烧IGBT。
仿真时有个有趣现象:当电网电压骤降10%,电磁转矩会出现0.2秒的相位滞后。这时候定子磁链像喝醉似的摇摆,但矢量控制能在1个周波内重新锁相。这种动态过程,用普通FFT分析会漏掉细节,得用希尔伯特-黄变换才能看清暂态里的玄机。
参考文献方面,定子磁链定向的经典可以翻翻李永东教授的《交流电机数字控制系统》,直接功率控制的新思路推荐查IEEE Trans on Power Electronics近三年的文章。不过现场调试时,老师傅的笔记本往往比论文更管用——毕竟实际系统里,磁链观测器的补偿系数总要留10%的调整余量。
最后提醒新手:别被理论公式唬住,带着示波器探头去现场实测,才能真正理解这些控制策略的精妙。记住,在电力电子世界里,好的控制算法要让电磁场跳起优雅的华尔兹,而不是失控的街舞。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 8
8 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)