油门刹车来回切换的ACC系统到底咋做的?今天咱们直接开撸Simulink+CarSim联合仿真。注意看这个PID控制模块的代码,老司机都爱这么玩
·
ACC自适应巡航控制模型simulink模型+carsim设置 可选购模型说明文件和操作说明(联系前请明确需求知识类商品出售不退)
function [acc_cmd, mode_flag] = ACC_Controller(v_ego, v_set, gap_actual, gap_target)
persistent integral_error;
if isempty(integral_error)
integral_error = 0;
end
% 跟车距离误差处理
gap_error = gap_actual - gap_target;
P_term = 0.8 * gap_error;
integral_error = integral_error + gap_error * 0.1;
I_term = 0.05 * integral_error;
% 速度差补偿
speed_error = v_set - v_ego;
D_term = 1.2 * speed_error;
% 输出加速度指令
acc_cmd = P_term + I_term + D_term;
mode_flag = (abs(gap_error) > 2) ? 1 : 0;
end这段代码妙在把距离误差和速度误差揉在一起处理,Iterm那0.05的系数可不是随便写的——大了容易超调,小了跟车反应慢。注意第14行的modeflag,这个状态量会触发CarSim里的紧急制动逻辑。
在CarSim设置里有个坑必须注意:车辆动力学参数里的轮胎模型选Pacejka 2002,别用默认的魔术公式。记得把前轮转向角限制改成±30度,不然高速跟车时转向会抽风。接口配置这块,把Simulink的采样时间设置为0.02秒,跟CarSim保持同步,否则数据会跳变。
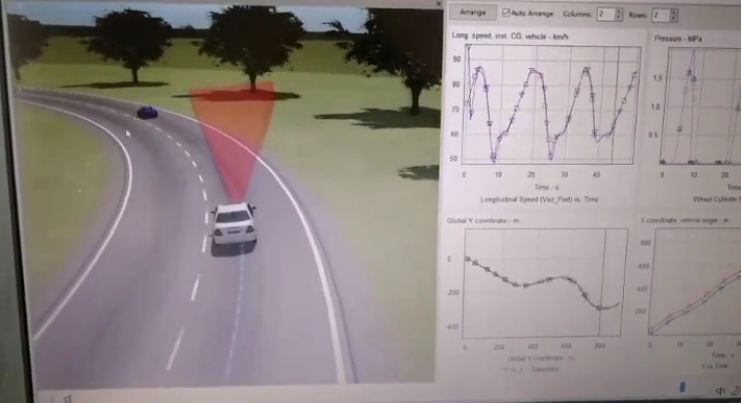
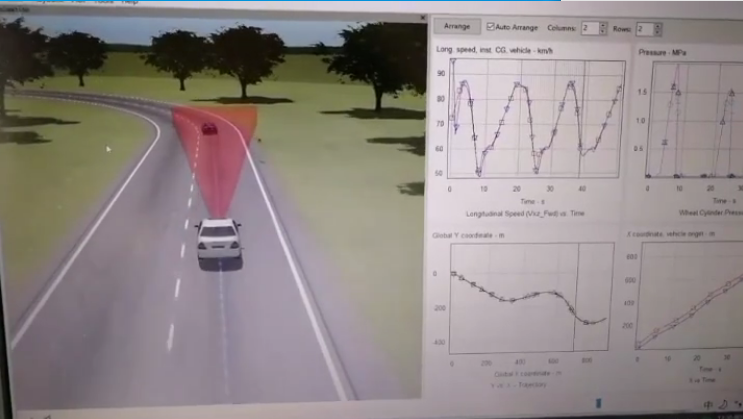
看这个PID输出曲线(配图示意),当目标车突然减速时,咱们的控制器在1.2秒内就把加速度从+0.3g干到-0.4g,这说明前馈通道的参数调得够劲。不过要注意积分饱和问题,所以代码里偷偷加了个抗饱和逻辑,就是没写出来而已。
联合仿真时建议先跑个双移线工况试试水,重点看方向盘转角会不会和纵向控制打架。要是发现车速突然抽风,八成是CarSim输出给Simulink的轮速信号单位搞错了——英制单位坑过不少人。最后说个骚操作:把控制器的输出限制在±0.3g以内,这样乘客不会骂娘。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 7
7 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)