探索二阶系统中线性与非线性自抗扰Simulink模型:与PID的扰动下对比
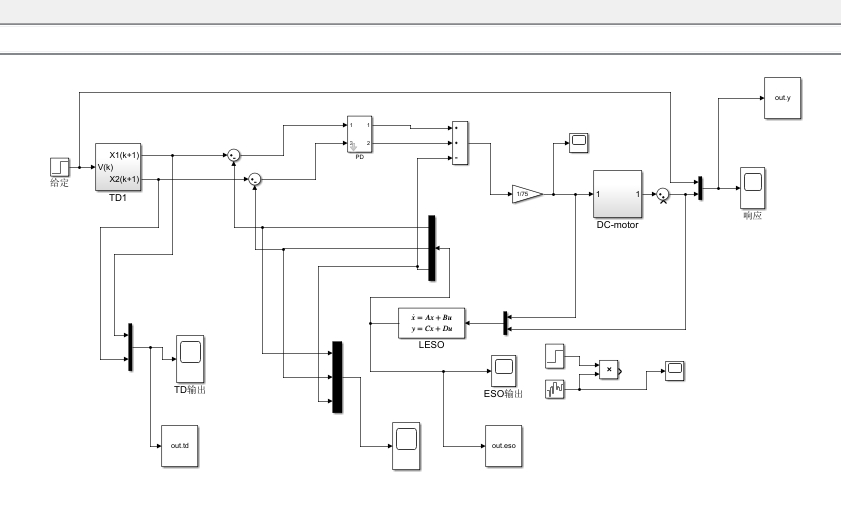
二阶系统的线性自抗扰(LADRC)simulink模型,以及非线性自抗扰(NLADRC)simulink模型,模型加入了扰动(阶跃,正弦),可分析扰动条件下PID与ADRC的对比。 俩个模型中复杂模块采用的代码编写,且LADRC进行了改进,加入了TD模块。
在控制系统的领域里,自抗扰控制(ADRC)技术近年来受到了广泛关注,它能有效应对系统中的不确定性和扰动。今天咱就来唠唠二阶系统里的线性自抗扰(LADRC)和非线性自抗扰(NLADRC)的Simulink模型,并且瞧瞧它们在加入扰动(阶跃和正弦)后,和传统PID控制比起来有啥不一样。
模型构成与扰动引入
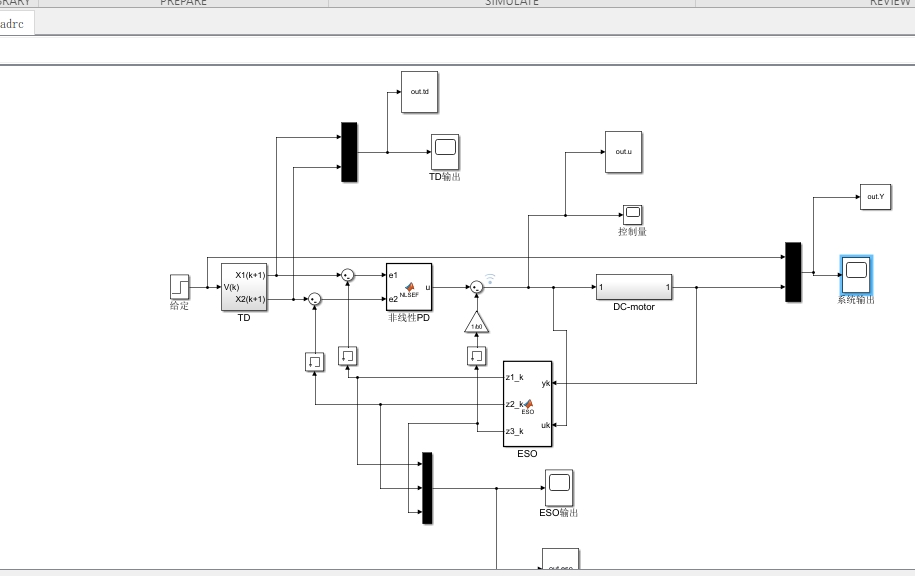
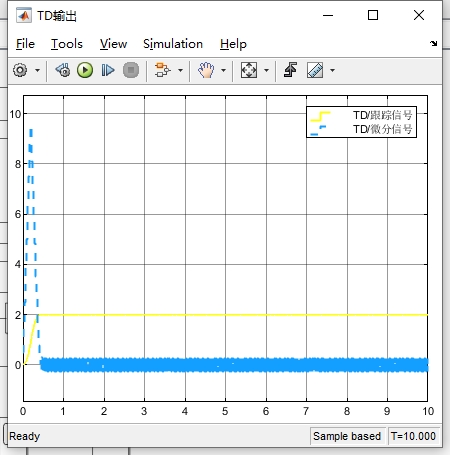
咱构建的这俩模型,可不是简单直接搭建的。其中复杂模块都是用代码编写实现的。就比如说,在LADRC模型里,特意加入了TD模块(跟踪微分器)。这个TD模块在代码实现上大概长这样:
function [x1, x2] = TD(r, h, x1, x2)
d = r * h;
a0 = sqrt(d * d + 8 * r * abs(x2));
if x2 >= 0
a = (x2 + a0) / 2;
else
a = (x2 - a0) / 2;
end
a1 = (a + d) * sign(a);
fhan = -r * sign(a1) * (abs(a1) >= d) - a * (abs(a1) < d);
x1 = x1 + h * x2;
x2 = x2 + h * fhan;
end代码分析:这段代码的核心功能就是实现一个跟踪微分器。输入 r 是目标值,h 是步长,x1 和 x2 是状态变量。首先通过一些计算得到 d 和 a0,然后根据 x2 的正负确定 a 的值,进而得到 a1 并计算出 fhan,最后更新 x1 和 x2。这个TD模块能对输入信号进行合理的处理,在LADRC里起到关键作用,帮助更好地跟踪目标信号。
同时,在模型中加入了两种常见的扰动类型——阶跃扰动和正弦扰动。阶跃扰动就像给系统一个突然的冲击,看看系统怎么应对这种突变;正弦扰动则模拟周期性的干扰,更贴近现实中一些复杂的环境干扰。通过在Simulink里添加相应的阶跃函数模块和正弦波模块,并连接到系统的合适位置,就能实现扰动的注入。
PID与ADRC对比分析
在扰动条件下,对比PID和ADRC就像看两个不同风格的武林高手过招。PID控制是传统的老牌高手,简单直接,依靠比例(P)、积分(I)、微分(D)三个参数来调整系统输出。比如在Simulink里搭建PID控制器也不难,设置好三个参数 Kp、Ki、Kd 就行。
function u = PID(Kp, Ki, Kd, e, e_1, integral)
p_term = Kp * e;
integral = integral + e;
i_term = Ki * integral;
d_term = Kd * (e - e_1);
u = p_term + i_term + d_term;
e_1 = e;
end代码分析:这段简单的PID代码,输入 Kp、Ki、Kd 是三个控制参数,e 是当前误差,e1 是上一时刻误差,integral 是积分项。首先计算比例项 pterm,然后更新积分项 integral 并算出积分项 iterm,接着计算微分项 dterm,最后三者相加得到控制输出 u,同时更新上一时刻误差 e_1。
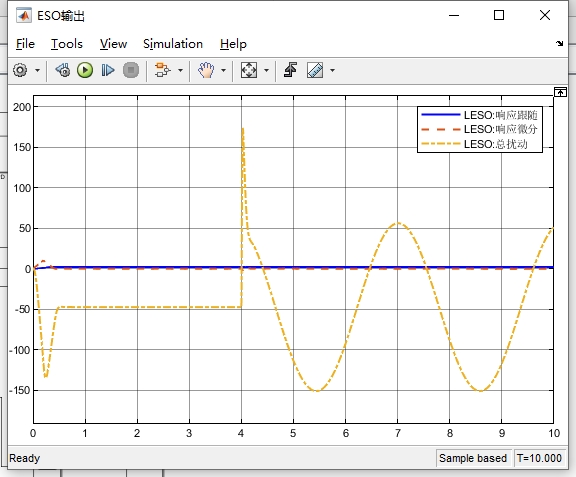
而ADRC,不管是线性的LADRC还是非线性的NLADRC,它们的优势在于对系统扰动的估计和补偿能力。LADRC通过线性的方式来估计和补偿扰动,NLADRC则利用非线性函数,在处理复杂非线性系统时可能更有优势。当加入扰动后,PID可能会出现超调较大、调整时间较长的情况,尤其是面对突然的阶跃扰动时。而ADRC因为能实时估计并补偿扰动,在跟踪性能和抗干扰能力上往往表现出色。
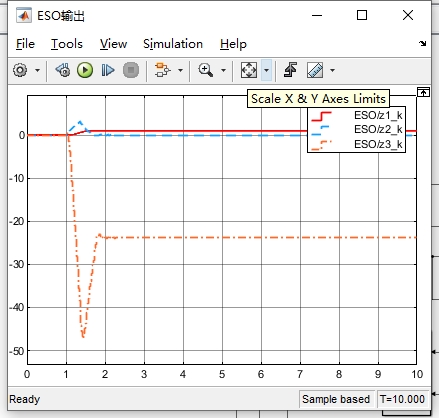
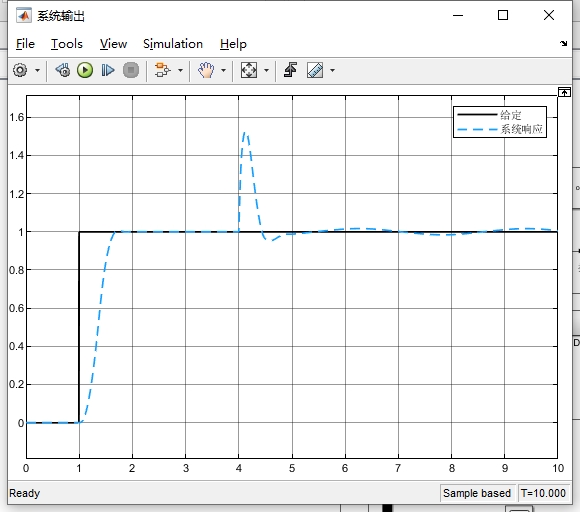
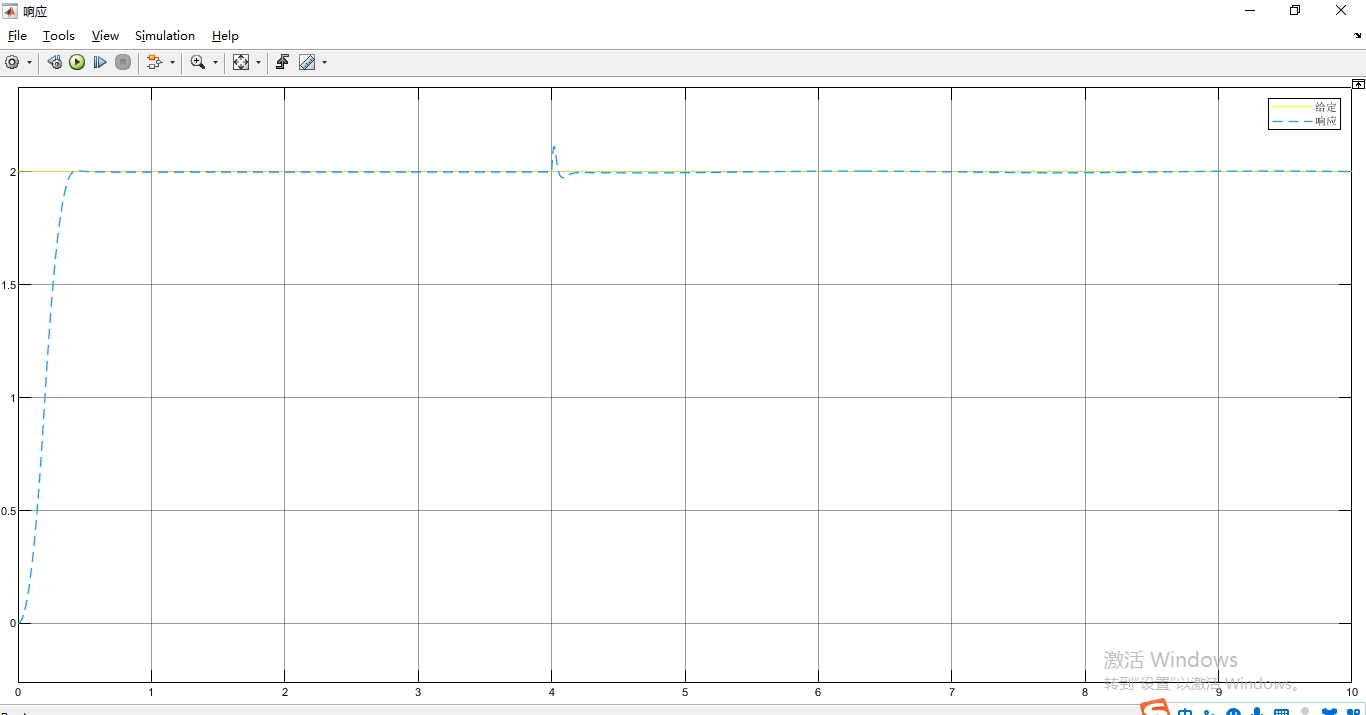
在实际的Simulink仿真中,可以通过设置不同的参数,观察系统输出曲线。比如对比在相同的阶跃扰动下,PID和ADRC控制的系统达到稳定状态的时间、超调量等指标。从输出曲线中能直观地看到,ADRC如何凭借其对扰动的有效抑制,让系统更快更稳地达到预期输出,而PID可能就需要更长时间去“挣扎”。
总的来说,通过搭建二阶系统的LADRC和NLADRC Simulink模型,并加入扰动与PID对比,我们能更深入地了解不同控制策略的特点和优劣,为实际工程应用中的控制器选择提供有力参考。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 22
22 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)