基于STM32控制的超声波导盲系统设计(全部资料)
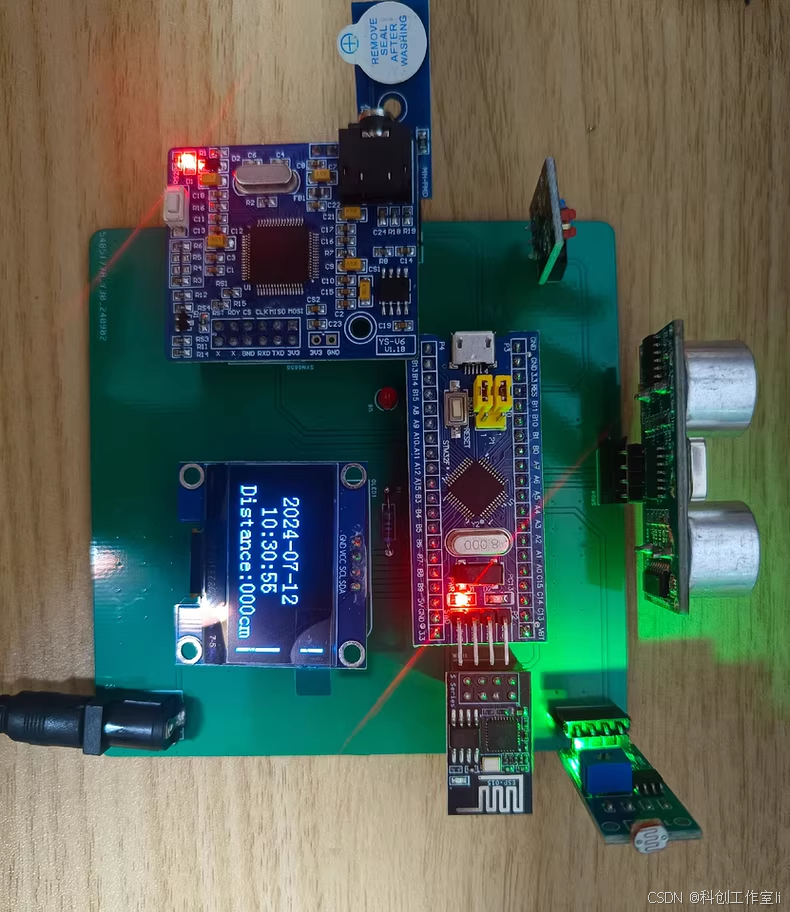
本文设计了一款基于STM32F103C8T6微控制器的超声波导盲系统,旨在解决视障人士出行安全问题。系统集成超声波测距、MPU6050姿态检测、BH1750光线检测、SYN6658语音合成、OLED显示等模块,实现障碍物分级报警、跌倒检测、自动灯光控制、语音提示等功能。通过模块化设计和算法优化,系统具有高精度(测距精度3mm)、快速响应(姿态检测120ms)、低功耗(静态电流1.3μA)等特点,成
基于STM32控制的超声波导盲系统设计
摘要
随着社会老龄化加剧和视障人群数量的不断增长,视障人士的出行安全与生活便利问题日益受到社会关注。据世界卫生组织统计,全球约有2.2亿视力障碍者,我国视障人士数量也已突破1700万,他们在出行过程中面临着障碍物避让、环境感知、时间获取等诸多困境,传统导盲杖功能单一、辅助效果有限,已无法满足视障人群多元化的出行需求。为改善这一现状,本文设计了一款基于STM32微控制器的超声波导盲系统,集成障碍物检测、姿态检测、光线检测、语音报时、语音提示及OLED显示六大核心功能,为视障人士提供全方位、智能化的出行辅助。
本系统以STM32F103C8T6微控制器为核心控制单元,采用模块化设计理念,将超声波测距模块、姿态检测模块、光线检测模块、SYN6658语音合成模块、OLED显示模块及蜂鸣器、LED灯光等执行模块有机结合,实现各功能的协同工作。系统通过超声波传感器实时检测前方障碍物距离,当距离低于安全阈值时,蜂鸣器发出分级报警提示;通过六轴姿态传感器实时采集设备姿态数据,判断是否出现倾倒、异常晃动等情况,及时触发蜂鸣器向周围人员发出求助提示;通过光线传感器检测环境光照强度,自动控制LED灯光的开启与关闭,既为视障人士提供微弱照明,也提醒周围行人与车辆注意避让;依托SYN6658语音模块实现语音报时与丰富的语音提示功能,解决视障人群获取时间不便及环境信息感知不及时的问题;通过OLED显示屏实时显示时间、障碍物距离、光照强度、姿态参数等数据,方便护理人员或调试人员查看系统运行状态。
本文详细阐述了系统的总体设计方案、硬件电路设计、软件流程设计,对各模块的选型依据、工作原理及接口连接进行了深入分析,并通过系统调试验证了设计的可行性与稳定性。测试结果表明,该系统障碍物检测精度高、响应速度快,姿态检测灵敏准确,光线控制智能可靠,语音播报清晰易懂,OLED显示直观稳定,能够有效辅助视障人士规避出行风险,提升出行的安全性与独立性,同时系统结构简单、成本低廉、功耗较低、携带方便,具有较强的实用性与推广价值。
关键词:STM32;超声波;导盲系统;姿态检测;语音合成;环境感知
ABSTRACT
With the acceleration of social aging and the continuous growth of the number of visually impaired people, the issues of travel safety and living convenience for visually impaired people have attracted increasing social attention. According to the World Health Organization, there are approximately 220 million visually impaired people worldwide, and the number of visually impaired people in China has also exceeded 17 million. They face many difficulties in the process of traveling, such as obstacle avoidance, environmental perception, and time acquisition. Traditional guide canes have single functions and limited auxiliary effects, which can no longer meet the diverse travel needs of visually impaired people. To improve this situation, this paper designs an ultrasonic guide system based on STM32 microcontroller, integrating six core functions: obstacle detection, attitude detection, light detection, voice time announcement, voice prompt and OLED display, to provide comprehensive and intelligent travel assistance for visually impaired people.
The system takes STM32F103C8T6 microcontroller as the core control unit, adopts the modular design concept, and organically combines ultrasonic ranging module, attitude detection module, light detection module, SYN6658 voice synthesis module, OLED display module, buzzer, LED light and other execution modules to realize the coordinated work of various functions. The system detects the distance of obstacles ahead in real time through ultrasonic sensors, and when the distance is lower than the safety threshold, the buzzer issues a hierarchical alarm prompt; it collects the equipment attitude data in real time through the six-axis attitude sensor, judges whether there is dumping, abnormal shaking and other situations, and triggers the buzzer to send help prompts to surrounding personnel in a timely manner; it detects the ambient light intensity through the light sensor, automatically controls the on and off of LED lights, which not only provides weak lighting for visually impaired people, but also reminds surrounding pedestrians and vehicles to avoid; relying on the SYN6658 voice module, it realizes voice time announcement and rich voice prompt functions, solving the problems of inconvenient time acquisition and untimely environmental information perception for visually impaired people; it displays time, obstacle distance, light intensity, attitude parameters and other data in real time through the OLED display, which is convenient for nurses or debuggers to check the system operation status.
This paper elaborates on the overall design scheme, hardware circuit design and software flow design of the system, deeply analyzes the selection basis, working principle and interface connection of each module, and verifies the feasibility and stability of the design through system debugging. The test results show that the system has high obstacle detection accuracy, fast response speed, sensitive and accurate attitude detection, intelligent and reliable light control, clear and understandable voice broadcast, and intuitive and stable OLED display. It can effectively assist visually impaired people to avoid travel risks, improve the safety and independence of travel. At the same time, the system has simple structure, low cost, low power consumption and convenient carrying, which has strong practicality and promotion value.
Key words: STM32; Ultrasonic; Guide System; Attitude Detection; Voice Synthesis; Environmental Perception
第一章 绪论
1.1 研究背景与意义
1.1.1 研究背景
视力障碍是全球性的健康问题,给患者的日常生活、工作和社交带来诸多不便。视障人群由于视觉功能缺失,无法直观感知周围环境的变化,在出行过程中极易遭遇障碍物碰撞、跌倒、交通事故等风险,严重影响其出行安全与生活质量。传统的导盲工具主要包括导盲杖、导盲犬等,其中导盲杖结构简单、成本低廉,是目前视障人群使用最广泛的辅助工具,但它仅能检测前方近距离的地面障碍物,对空中障碍物、侧面障碍物及环境亮度变化、自身姿态异常等情况无法识别,辅助效果十分有限。
导盲犬虽然辅助效果较好,能够帮助视障人士规避多种出行风险,但导盲犬的训练成本极高、周期极长,一条合格导盲犬的训练费用可达数十万元,且数量稀少,无法满足广大视障人群的需求;同时,导盲犬的饲养成本较高,对饲养环境也有一定要求,进一步限制了其推广应用。随着嵌入式技术、传感器技术、语音合成技术的快速发展,智能化导盲设备逐渐成为研究热点,这类设备能够集成多种感知功能,实时获取周围环境信息与设备自身状态,通过语音、声光等方式为视障人士提供精准提示,具有成本低廉、功能丰富、携带方便等优势,能够有效弥补传统导盲工具的不足,为视障人士的出行提供更全面的保障。
STM32系列微控制器是意法半导体公司推出的高性能、低功耗、低成本的嵌入式微控制器,具有丰富的外设接口、强大的数据处理能力和灵活的编程特性,广泛应用于智能控制、物联网、工业自动化等领域。超声波传感器具有测距精度高、响应速度快、不受光线影响等优点,适合用于障碍物检测;SYN6658语音合成模块是一款高性能的中文语音合成模块,具有语音清晰、合成速度快、接口简单等特点,能够实现丰富的语音功能;OLED显示屏具有亮度高、对比度高、功耗低、显示清晰等优势,适合用于数据实时显示。基于以上技术,设计一款基于STM32控制的超声波导盲系统,集成多种智能辅助功能,能够有效解决视障人士出行过程中面临的诸多问题,具有重要的研究价值与现实意义。
1.1.2 研究意义
本研究的意义主要体现在理论意义与实际意义两个方面:
在理论意义方面,本文围绕视障人士的出行需求,结合STM32嵌入式技术、超声波测距技术、姿态检测技术、语音合成技术等多种先进技术,设计了一套功能完善、性能稳定的超声波导盲系统,丰富了智能化导盲设备的研究成果,为后续相关领域的研究提供了一定的理论参考与技术借鉴;同时,本文对各模块的协同控制策略、数据处理方法进行了深入研究,优化了系统的响应速度与检测精度,推动了嵌入式技术在视障辅助设备领域的应用与发展。
在实际意义方面,本系统集成了障碍物检测、姿态检测、光线检测、语音报时、语音提示及OLED显示六大核心功能,能够全方位感知周围环境与设备自身状态,为视障人士提供精准、及时的辅助提示,有效规避出行风险,提升视障人士出行的安全性与独立性,帮助视障人士更好地融入社会;系统采用模块化设计,结构简单、成本低廉、功耗较低、携带方便,适合大规模推广应用,能够满足广大视障人群的使用需求,减轻视障人士家庭的经济负担;此外,本系统的设计与推广,也能够提升社会对於视障人群的关注程度,推动无障碍设施建设的发展,促进社会的公平与和谐。
1.2 国内外研究现状
1.2.1 国外研究现状
国外对于智能化导盲设备的研究起步较早,技术相对成熟,已推出多款具有代表性的导盲产品,且在实际应用中取得了较好的效果。美国、英国、日本等发达国家在该领域投入了大量资源,研发出多种先进的导盲设备,形成了较为完善的产品体系。
美国在智能导盲设备领域的研究处于领先地位,推出了多款集成多种先进技术的导盲产品。例如,美国某公司研发的智能导盲眼镜,集成了摄像头、激光雷达和人工智能算法,能够实时识别周围环境中的障碍物、道路标志和行人,并通过语音提示为视障人士提供导航信息,同时还具备人脸识别、语音交互等功能,进一步提升了视障人士的出行便利性;此外,美国的研究团队还致力于开发基于超声波技术的导盲手环,通过超声波传感器检测周围障碍物,结合震动提示,帮助视障人士感知周围环境,具有体积小、携带方便等优势。
英国的研究重点主要集中在导盲设备的智能化与便携化方面,研发出多款高精度的导盲设备。例如,英国某科研机构开发的智能导盲杖,集成了超声波测距模块、GPS定位模块和蓝牙通信模块,不仅能够实时检测前方障碍物,还能够实现定位导航、远程求助等功能,视障人士可以通过语音指令获取当前位置、规划出行路线,遇到紧急情况时还能够一键向家属或急救人员发送求助信息;此外,英国还推出了基于语音合成技术的导盲头盔,通过语音提示为视障人士提供全方位的环境信息,辅助视障人士安全出行。
日本在导盲设备领域的研究注重实用性与人性化,研发出多款贴合视障人士实际需求的产品。例如,日本研发的能感知人脸高度的电子导盲杖,采用超声波感应技术,可检测到前方2米处脸部高度的障碍物,为视障人士在复杂的人群环境中出行提供了有效帮助;此外,日本某公司推出的智能导盲机器人,集成了超声波传感器、红外传感器和语音交互模块,能够自主规避障碍物,为视障人士提供导航服务,同时还具备语音报时、环境监测等功能,进一步提升了视障人士的出行体验。
总体来看,国外的智能导盲设备技术先进、功能丰富,但也存在一些不足之处,如产品价格昂贵,普通视障家庭难以承受;部分设备体积较大、佩戴不舒适,影响用户体验;在复杂环境下,设备的识别准确率和稳定性仍有待提高,这些因素限制了其大规模推广应用。
1.2.2 国内研究现状
国内对于智能化导盲设备的研究近年来也取得了长足进展,随着国家对於残疾人事业的重视程度不断提高,以及嵌入式技术、传感器技术的快速普及,众多科研机构和高校纷纷开展相关研究,研发出多种具有自主知识产权的导盲设备,逐步缩小了与国外先进技术的差距。
国内的研究主要集中在基于单片机或STM32微控制器的导盲系统设计,注重功能的实用性与成本的可控性,推出了多款性价比高的导盲产品。例如,部分高校的科研团队基于STM32微控制器,设计了多功能智能导盲系统,集成了超声波测距、红外线感应、GPS定位以及蓝牙通信等技术,实现了实时障碍物检测、环境感知、路径规划和远程求助等功能;还有团队利用物联网技术和传感器技术,开发了智能导盲腰带,通过立体声导航和声音图像模式,帮助视障人士感知周围环境,在脑内建立虚拟环境地图,实现自主导航。
在超声波导盲系统方面,国内研究人员进行了大量的探索与优化。例如,有研究采用STM32微控制器作为核心,结合超声波传感器实现障碍物检测,通过蜂鸣器和震动模块发出提示,同时集成语音报时功能,解决视障人士获取时间不便的问题;还有研究优化了超声波测距算法,提高了障碍物检测的精度与响应速度,同时增加了姿态检测功能,能够及时发现视障人士的跌倒风险,发出求助提示。此外,国内部分企业也推出了相关的导盲产品,如米家智能盲杖,集成了超声波传感器和红外传感器,能够及时检测到前方的障碍物,并通过语音提示或震动反馈的方式,提醒视障者注意避让,同时配备了高精度的GPS定位模块,与手机APP连接后,可实现实时定位、路径规划和紧急求助等功能,凭借较高的性价比获得了广大视障人士和家属的关注与好评。
虽然国内的研究取得了一定的成果,但与国外先进技术相比,仍存在一些不足:一是技术创新能力有待加强,部分关键技术仍依赖进口,核心算法的优化程度不够;二是产品的可靠性和稳定性需要进一步提升,在复杂环境(如强光、暴雨、嘈杂环境)下,设备的性能容易受到影响;三是市场推广和应用力度不足,导致许多优秀的导盲产品未能广泛普及;四是产品的人性化设计不够完善,部分设备的操作方式较为复杂,视障人士的学习成本较高。针对以上不足,本文设计了一款基于STM32控制的超声波导盲系统,优化各模块的设计与协同控制策略,提升系统的性能与实用性,同时控制产品成本,满足广大视障人群的使用需求。
1.3 研究内容与研究方法
1.3.1 研究内容
本文围绕基于STM32控制的超声波导盲系统设计展开研究,主要研究内容如下:
1. 系统总体设计方案研究:结合视障人士的出行需求,明确系统的设计目标与功能要求,确定系统的总体架构,采用模块化设计理念,将系统分为核心控制模块、障碍物检测模块、姿态检测模块、光线检测模块、语音合成模块、显示模块及执行模块,设计各模块的连接方式与协同控制策略,确保系统功能完善、性能稳定。
2. 硬件电路设计:根据系统总体设计方案,选择合适的元器件进行各模块的硬件电路设计,包括STM32核心控制电路、超声波测距电路、姿态检测电路、光线检测电路、SYN6658语音合成电路、OLED显示电路、蜂鸣器报警电路、LED灯光控制电路及电源电路,绘制硬件电路原理图,完成PCB板的设计与制作,确保硬件电路布局合理、功耗较低、稳定性高。
3. 软件流程设计:基于STM32微控制器,采用C语言进行系统软件设计,明确各模块的软件工作流程,设计系统主程序、障碍物检测子程序、姿态检测子程序、光线检测子程序、语音合成子程序、显示子程序及中断服务程序,优化软件算法,提高系统的响应速度与检测精度,确保各功能模块协同工作。
4. 系统调试与性能测试:搭建系统调试平台,对硬件电路和软件程序进行调试,排查电路故障与程序漏洞;设计性能测试方案,对系统的各项功能进行测试,包括障碍物检测精度、姿态检测灵敏度、光线控制可靠性、语音播报效果及OLED显示效果,验证系统是否达到设计目标,针对测试中发现的问题进行优化与改进。
5. 论文撰写:整理研究过程中的相关资料,总结系统设计的成果与不足,撰写毕业论文,详细阐述系统的设计原理、实现过程及测试结果,提出系统的改进方向与推广建议。
1.3.2 研究方法
本文采用的研究方法主要有以下几种:
1. 文献研究法:通过查阅国内外相关文献、期刊、专利等资料,了解智能化导盲设备的研究现状、发展趋势及相关技术(如STM32嵌入式技术、超声波测距技术、语音合成技术等)的应用情况,借鉴已有的研究成果与设计经验,为系统的设计提供理论参考与技术支持。
2. 模块化设计法:采用模块化设计理念,将系统分为多个功能模块,每个模块独立设计、独立调试,然后将各模块有机结合,实现系统的整体功能,这种设计方法不仅能够提高系统的设计效率,便于系统的调试与维护,还能够降低系统的设计难度,便于后续功能的扩展与升级。
3. 实验法:根据系统的设计方案,搭建硬件实验平台,制作PCB板,焊接元器件,编写软件程序,对系统的各项功能进行实验调试与性能测试,通过实验数据验证系统设计的可行性与稳定性,针对实验中发现的问题进行优化与改进,确保系统达到设计目标。
4. 对比分析法:将本文设计的超声波导盲系统与国内外现有的导盲设备进行对比分析,对比系统的功能、性能、成本、体积等方面的优势与不足,借鉴其他产品的优点,优化本系统的设计,提升系统的实用性与竞争力。
1.4 研究难点与创新点
1.4.1 研究难点
本文研究过程中面临的难点主要有以下几点:
1. 各模块的协同控制:系统集成了多个功能模块,各模块的工作原理不同、响应速度不同,如何设计合理的协同控制策略,确保各模块之间数据传输顺畅、工作协调,避免出现功能冲突或响应延迟,是本文研究的难点之一。
2. 障碍物检测精度的优化:超声波传感器在测距过程中容易受到环境温度、湿度、噪声等因素的影响,导致测距精度下降,如何优化超声波测距算法,减少环境因素的干扰,提高障碍物检测的精度与稳定性,满足视障人士的出行需求,是本文研究的另一难点。
3. 姿态检测的灵敏度与准确性:姿态检测模块需要实时采集设备的姿态数据,准确判断是否出现倾倒、异常晃动等情况,如何优化姿态数据的处理算法,提高姿态检测的灵敏度与准确性,及时触发报警提示,避免视障人士发生跌倒等意外,也是本文研究的难点之一。
4. 系统功耗的控制:本系统主要用于视障人士出行携带,需要采用电池供电,如何优化硬件电路设计与软件程序,降低系统的功耗,延长电池的续航时间,确保系统能够长时间稳定工作,是本文研究的重点与难点。
1.4.2 研究创新点
本文的创新点主要体现在以下几个方面:
1. 功能集成化:集成了障碍物检测、姿态检测、光线检测、语音报时、语音提示及OLED显示六大核心功能,全方位覆盖视障人士出行过程中的各类需求,相比传统导盲杖功能单一的特点,能够为视障人士提供更全面、更智能的辅助支持,解决了视障人士障碍物避让、时间获取、环境感知等多方面的难题。
2. 检测算法优化:针对超声波测距精度受环境因素影响较大的问题,优化了超声波测距算法,引入温度补偿机制,减少环境温度对测距精度的干扰,提高了障碍物检测的精度与稳定性;针对姿态检测灵敏度不足的问题,优化了姿态数据的融合处理算法,采用互补滤波算法融合加速度计与陀螺仪的数据,提升了姿态检测的灵敏度与准确性。
3. 人性化设计:采用SYN6658语音合成模块,实现丰富的语音功能,语音播报清晰易懂、语速适中,适合视障人士听取;设计分级报警机制,根据障碍物距离、姿态异常程度发出不同频率的蜂鸣器提示与语音提示,避免频繁打扰视障人士;优化系统的体积与重量,采用小型化元器件,设计便携化的外壳,便于视障人士携带与使用;OLED显示屏的设计,既方便护理人员查看系统运行状态,也可在必要时为视障人士提供视觉辅助(如通过亮度变化提示)。
4. 高性价比设计:采用低成本、高性能的元器件,优化硬件电路设计,控制系统的整体成本,相比国外昂贵的智能导盲设备,本系统性价比更高,适合大规模推广应用,能够满足广大视障人群的使用需求,减轻视障人士家庭的经济负担。
1.5 论文结构安排
本文共分为六章,各章节的结构安排如下:
第一章 绪论:阐述本文的研究背景与意义,分析国内外研究现状,明确研究内容、研究方法、研究难点与创新点,安排论文的整体结构。
第二章 相关技术基础:介绍本文设计中涉及的相关技术,包括STM32微控制器技术、超声波测距技术、姿态检测技术、光线检测技术、SYN6658语音合成技术及OLED显示技术,为系统的设计提供理论基础与技术支持。
第三章 系统总体设计方案:明确系统的设计目标与功能要求,设计系统的总体架构,划分各功能模块,阐述各模块的工作原理与功能定位,设计各模块的连接方式与协同控制策略,绘制系统总体框图。
第四章 系统硬件电路设计:详细阐述各功能模块的硬件电路设计,包括元器件选型、电路原理图设计、PCB板设计与制作,重点介绍核心控制电路、超声波测距电路、语音合成电路等关键电路的设计过程。
第五章 系统软件流程设计:基于STM32微控制器,设计系统的软件总体流程,详细阐述主程序、各子程序及中断服务程序的设计思路与流程,优化软件算法,确保系统各功能的实现。
第六章 系统调试与性能测试:搭建系统调试平台,对硬件电路和软件程序进行调试,排查故障;设计性能测试方案,对系统的各项功能进行测试,分析测试结果,验证系统的可行性与稳定性,提出系统的改进方向。
第七章 总结与展望:总结本文的研究成果,分析系统设计中存在的不足,提出系统的改进方向与推广建议,对未来智能化导盲设备的发展趋势进行展望。
第二章 相关技术基础
本章主要介绍本文设计的基于STM32控制的超声波导盲系统所涉及的相关技术,包括STM32微控制器技术、超声波测距技术、姿态检测技术、光线检测技术、SYN6658语音合成技术及OLED显示技术,通过对这些技术的原理、特点及应用情况进行详细阐述,为系统的总体设计、硬件电路设计及软件流程设计提供理论基础与技术支持。
2.1 STM32微控制器技术
2.1.1 STM32微控制器概述
STM32系列微控制器是意法半导体(STMicroelectronics)公司推出的基于ARM Cortex-M内核的32位嵌入式微控制器,具有高性能、低功耗、低成本、高集成度等优点,广泛应用于智能控制、物联网、工业自动化、消费电子等多个领域。STM32系列微控制器涵盖了多种型号,根据内核类型可分为Cortex-M0、Cortex-M3、Cortex-M4、Cortex-M7等系列,不同系列的微控制器在性能、外设接口、功耗等方面有所差异,可根据具体的应用需求进行选型。
本文设计的超声波导盲系统,需要实现多模块的协同控制、数据采集与处理、语音播报、显示等功能,对微控制器的性能、外设接口及功耗有一定的要求。综合考虑系统的功能需求、成本控制及功耗要求,本文选用STM32F103C8T6微控制器作为系统的核心控制单元。该型号微控制器基于ARM Cortex-M3内核,工作频率最高可达72MHz,具有丰富的外设接口,包括GPIO、UART、I2C、SPI、ADC、定时器等,能够满足系统各模块的接口需求;同时,该型号微控制器功耗较低,支持多种低功耗模式,适合电池供电的便携设备;此外,其成本低廉、资料丰富、开发难度较低,便于系统的设计、调试与推广。
2.1.2 STM32F103C8T6微控制器核心特性
STM32F103C8T6微控制器的核心特性如下:
1. 内核:采用ARM Cortex-M3内核,32位指令集,工作频率最高72MHz,运算速度快,能够快速处理各模块采集的数据与控制指令。
2. 存储器:内置64KB的Flash程序存储器,用于存储系统软件程序;内置20KB的SRAM数据存储器,用于存储系统运行过程中的临时数据,满足系统程序存储与数据处理的需求。
3. 外设接口:包含3个通用定时器、1个高级定时器、2个UART串口、2个I2C接口、1个SPI接口、1个ADC(12位,最多16个通道)、44个GPIO引脚(可配置为输入、输出、中断等模式),能够满足超声波传感器、姿态传感器、语音模块、OLED显示屏等各模块的接口连接需求。
4. 功耗特性:支持睡眠模式、停止模式、待机模式三种低功耗模式,睡眠模式功耗最低可达1.3μA,停止模式功耗最低可达0.5μA,待机模式功耗最低可达0.1μA,能够有效降低系统功耗,延长电池续航时间。
5. 工作环境:工作电压范围为2.0V~3.6V,工作温度范围为-40℃~85℃,能够适应不同的环境条件,确保系统在复杂环境下稳定工作。
6. 开发支持:支持多种开发工具,如Keil MDK、STM32CubeMX等,其中STM32CubeMX能够快速配置微控制器的外设接口,自动生成初始化代码,极大地提高了软件开发效率;同时,国内外有大量的开发资料与技术社区,便于开发人员解决开发过程中遇到的问题。
2.1.3 STM32微控制器的应用优势
相比其他类型的微控制器(如51单片机、AVR单片机),STM32微控制器在本系统设计中具有以下应用优势:
1. 性能更强:STM32微控制器采用32位内核,工作频率高,运算速度快,能够快速处理超声波测距数据、姿态数据、光线数据等,同时能够实现多模块的协同控制,避免出现响应延迟的情况,满足系统实时性的要求。
2. 外设更丰富:STM32微控制器集成了多种外设接口,无需额外扩展芯片,即可实现与超声波传感器、姿态传感器、SYN6658语音模块、OLED显示屏等各模块的连接,简化了硬件电路设计,降低了系统的体积与成本。
3. 功耗更低:STM32微控制器支持多种低功耗模式,能够根据系统的工作状态自动切换功耗模式,在系统空闲时降低功耗,延长电池续航时间,适合便携化的导盲设备使用。
4. 可扩展性强:STM32微控制器的GPIO引脚数量多,且支持多种通信协议,便于后续扩展系统功能,如增加GPS定位模块、蓝牙通信模块、紧急求助模块等,提升系统的实用性。
5. 开发便捷:STM32微控制器的开发工具成熟,资料丰富,开发难度较低,能够快速完成软件程序的编写与调试,提高系统的设计效率,缩短开发周期。
2.2 超声波测距技术
2.2.1 超声波测距原理
超声波是指频率高于20kHz的声波,其具有方向性强、传播距离远、不受光线影响、能够在空气中传播等特点,广泛应用于测距、测速、探伤等领域。超声波测距技术的工作原理与蝙蝠飞行的原理相似,即通过发射超声波脉冲,接收反射回来的超声波回波,计算超声波从发射到接收的时间差,结合超声波在空气中的传播速度,从而计算出测量目标与传感器之间的距离。
本文采用的超声波测距模块为HC-SR04,其工作原理如下:当STM32微控制器向超声波模块的Trig引脚发送一个至少10微秒的高电平触发信号时,模块内部会自动发射8个40kHz的超声波脉冲,这些脉冲以声波形式在空气中传播;如果前方有障碍物,超声波脉冲会被障碍物反射回来,模块的Echo引脚会接收到反射回来的回波信号,并输出一个高电平,该高电平的持续时间就是超声波从发射到返回的总时间(即往返时间)。
超声波在空气中的传播速度受环境温度的影响较大,常温下(25℃)的传播速度约为340m/s,传播速度与温度的关系可表示为:v = 331.5 + 0.6×T(其中v为超声波传播速度,单位为m/s;T为环境温度,单位为℃)。根据超声波的往返时间t和传播速度v,即可计算出障碍物与传感器之间的距离d,计算公式如下:d = (v×t)/2。由于超声波是往返传播的,因此需要将计算结果除以2,得到障碍物与传感器之间的实际距离。
为了简化计算,在实际应用中,通常采用简化公式:距离(cm) = 时间(μs) / 58。该公式的推导过程如下:声速340m/s换算成cm/μs就是0.034cm/μs,来回时间要除以2,所以实际系数是1/(0.034×2)≈58,因此通过测量Echo引脚高电平的持续时间(单位为μs),除以58即可得到障碍物的距离(单位为cm)。HC-SR04超声波模块的测距范围为2cm到400cm,精度能达到3mm,对于本导盲系统的障碍物检测需求完全够用,不过需要注意,太近的距离(小于2cm)可能会测不准,因为发射和接收信号之间会有干扰。
2.2.2 超声波测距模块选型
目前市面上常用的超声波测距模块有HC-SR04、HC-SR05、US-100等,不同型号的超声波模块在测距范围、精度、功耗、接口等方面有所差异,需要根据系统的设计需求进行选型。
本文设计的超声波导盲系统,障碍物检测的范围要求为2cm~400cm,精度要求不低于5mm,同时需要满足功耗低、接口简单、成本低廉等要求。综合对比各型号超声波模块的性能参数,本文选用HC-SR04超声波测距模块,该模块具有以下优点:
1. 测距范围广:测距范围为2cm~400cm,能够满足视障人士出行过程中对不同距离障碍物检测的需求,既能够检测近距离的地面障碍物,也能够检测远距离的前方障碍物。
2. 精度高:测距精度可达3mm,能够准确测量障碍物的距离,为视障人士提供精准的提示,避免因测距误差导致的出行风险。
3. 接口简单:采用4个引脚(VCC、GND、Trig、Echo),其中Trig为触发引脚,Echo为回波引脚,可直接与STM32微控制器的GPIO引脚连接,无需额外扩展接口电路,简化了硬件电路设计。
4. 功耗低:工作功耗较低,静态功耗几乎可以忽略不计,适合电池供电的便携设备使用,能够延长系统的续航时间。
5. 成本低廉:HC-SR04超声波模块的价格低廉,易于采购,能够有效控制系统的整体成本,适合大规模推广应用。
2.2.3 超声波测距技术在导盲系统中的应用
在智能化导盲系统中,超声波测距技术是实现障碍物检测的核心技术之一,其主要应用如下:
1. 前方障碍物检测:将超声波传感器安装在导盲设备的前端,实时检测前方的障碍物(如墙壁、栏杆、行人、车辆等),计算障碍物与设备之间的距离,当距离低于安全阈值时,通过蜂鸣器、语音等方式向视障人士发出提示,提醒其注意避让。
2. 近距离障碍物检测:在导盲设备的底部安装超声波传感器,检测地面的近距离障碍物(如台阶、坑洼、石块等),避免视障人士因踩踏障碍物而摔倒,提升出行的安全性。
3. 分级提示:根据障碍物与设备之间的距离,设置不同的安全阈值,实现分级提示。例如,当距离较远(大于1m)时,发出低频蜂鸣提示;当距离较近(0.5m~1m)时,发出中频蜂鸣提示与语音提示;当距离极近(小于0.5m)时,发出高频蜂鸣提示与紧急语音提示,让视障人士能够根据提示判断障碍物的远近,采取相应的避让措施。
相比其他障碍物检测技术(如红外检测技术、视觉检测技术),超声波测距技术具有不受光线影响、测距精度高、响应速度快、成本低廉等优势,适合用于导盲系统的障碍物检测,能够在不同环境条件下为视障人士提供稳定、精准的障碍物信息。
2.3 姿态检测技术
2.3.1 姿态检测原理
姿态检测技术是指通过传感器采集设备或人体的姿态数据(如角度、角速度、加速度等),经过数据处理与分析,判断设备或人体的姿态状态(如直立、倾倒、倾斜、晃动等)的技术。在本文设计的超声波导盲系统中,姿态检测主要用于检测导盲设备的姿态状态,判断视障人士是否出现跌倒、设备是否出现倾倒等异常情况,及时发出报警提示,避免视障人士发生意外。
本文采用的姿态检测模块为MPU6050六轴姿态传感器,该模块集成了三轴加速度计和三轴陀螺仪,能够同时采集设备的三轴加速度数据和三轴角速度数据,通过数据融合算法,计算出设备的姿态角度(如俯仰角、横滚角),从而判断设备的姿态状态。
三轴加速度计的工作原理基于MEMS电容式结构,当加速度作用时,内部的可动质量块会发生位移,导致固定电极与可动质量块之间的电容发生变化,通过ASIC电路将电容变化量转换为数字信号(16位ADC),从而得到加速度数据。在静态情况下,三轴加速度计能够检测到重力加速度的分量,根据重力加速度的分量,可计算出设备的俯仰角和横滚角;在动态情况下,能够检测到设备的运动加速度,反映设备的运动状态。
三轴陀螺仪的工作原理基于科里奥利效应,当设备发生旋转时,内部的振动质量块会受到垂直于驱动方向的科里奥利力,导致质量块发生位移,通过检测位移量换算出角速度(测量范围为±250~2000°/s),并通过16位ADC进行数字化输出,能够准确反映设备的旋转运动状态。
由于三轴加速度计在动态情况下容易受到干扰,测量精度较低;而三轴陀螺仪存在漂移误差,长时间测量后精度会下降,因此需要采用数据融合算法(如互补滤波算法、卡尔曼滤波算法),将三轴加速度计和三轴陀螺仪的数据进行融合处理,互补两者的优势,提高姿态检测的精度与稳定性,得到准确的设备姿态角度。
2.3.2 MPU6050姿态传感器特性
MPU6050六轴姿态传感器是一款低成本、高性能的姿态检测模块,具有以下特性:
1. 集成度高:集成了三轴加速度计、三轴陀螺仪和温度传感器,无需额外扩展传感器,即可实现六轴姿态数据的采集,简化了硬件电路设计,降低了系统的体积与成本。
2. 测量精度高:加速度计的测量范围为±2g/±4g/±8g/±16g,分辨率可达16位;陀螺仪的测量范围为±250°/s/±500°/s/±1000°/s/±2000°/s,分辨率可达16位,能够准确采集姿态数据,经过数据融合后,姿态角度的测量精度可达±0.5°。
3. 接口简单:采用I2C通信接口,可直接与STM32微控制器的I2C接口连接,数据传输速度快,接口电路简单,便于硬件电路的设计与调试。
4. 功耗低:工作功耗较低,静态功耗约为3.9mA,支持低功耗模式,能够有效降低系统功耗,延长电池续航时间。
5. 稳定性高:采用先进的制造工艺,抗干扰能力强,能够在不同的环境条件下稳定工作,确保姿态检测的可靠性。
2.3.3 姿态检测技术在导盲系统中的应用
在超声波导盲系统中,姿态检测技术的应用主要体现在以下几个方面:
1. 跌倒检测:通过MPU6050传感器实时采集导盲设备的姿态数据,计算设备的俯仰角和横滚角,当检测到俯仰角或横滚角超过预设阈值(如大于45°),且持续时间超过预设时间(如500ms)时,判断视障人士可能发生了跌倒,立即触发蜂鸣器发出高频报警提示,同时通过语音模块发出求助语音(如“求助!求助!我已跌倒,请过来帮助我!”),向周围人员发出求助信号,及时为视障人士提供帮助。
2. 设备倾倒检测:当导盲设备不慎倾倒时,姿态传感器会检测到异常的姿态变化,立即触发蜂鸣器报警,提醒视障人士或周围人员及时扶起设备,避免设备损坏或影响正常使用。
3. 姿态异常提示:当视障人士在行走过程中出现姿态异常(如身体过度倾斜、晃动剧烈)时,姿态传感器会检测到相应的姿态数据变化,发出相应的提示信号,提醒视障人士调整姿态,避免因姿态异常导致跌倒等意外。
姿态检测技术的应用,能够有效提升导盲系统的安全性,及时发现视障人士的跌倒等意外情况,为视障人士的出行提供更全面的保障。
2.4 光线检测技术
2.4.1 光线检测原理
光线检测技术是指通过光线传感器采集周围环境的光照强度数据,将光信号转换为电信号,经过处理与分析,得到环境光照强度的技术。在本文设计的超声波导盲系统中,光线检测主要用于实时检测周围环境的亮度变化,自动控制LED灯光的开启与关闭,既为视障人士提供微弱照明,帮助其感知周围环境,也提醒周围的行人与车辆注意避让视障人士,提升视障人士夜间或光线较暗环境下出行的安全性。
本文采用的光线检测模块为BH1750光照传感器,该模块是一款数字式光照传感器,采用I2C通信接口,能够高精度地测量环境光照强度,其工作原理基于光电效应:传感器内部的光电二极管受到光照后,会产生光电流,光电流的大小与光照强度成正比,通过内部的放大电路、ADC转换电路,将光电流转换为数字信号,传输给STM32微控制器,微控制器对数字信号进行处理,得到环境的光照强度值。
BH1750光照传感器的测量范围为1lx~65535lx,分辨率可达0.11lx,能够适应不同的光照环境(如白天强光、夜间弱光、室内光线等),测量精度高,响应速度快,能够实时反映环境光照强度的变化。该模块支持两种测量模式:连续测量模式和单次测量模式,连续测量模式能够持续采集光照强度数据,单次测量模式则只采集一次光照强度数据后进入低功耗模式,本文采用连续测量模式,确保能够实时检测环境光照强度的变化。
2.4.2 BH1750光照传感器特性
BH1750光照传感器具有以下特性:
1. 测量精度高:测量范围广(1lx~65535lx),分辨率高(0.11lx),能够准确测量不同环境下的光照强度,满足系统的光线检测需求。
2. 接口简单:采用I2C通信接口,可直接与STM32微控制器的I2C接口连接,数据传输稳定、速度快,接口电路简单,便于硬件电路的设计与调试。
3. 功耗低:工作功耗较低,连续测量模式下的功耗约为1.2mA,低功耗模式下的功耗约为0.5μA,能够有效降低系统功耗,延长电池续航时间。
4. 响应速度快:响应时间短(约120ms),能够实时检测环境光照强度的变化,及时触发LED灯光的开启与关闭,确保系统的及时性。
5. 稳定性高:抗干扰能力强,不受外界环境因素(如温度、湿度)的影响,能够在不同的环境条件下稳定工作,确保光线检测的可靠性。
2.4.3 光线检测技术在导盲系统中的应用
在超声波导盲系统中,光线检测技术的应用主要体现在以下几个方面:
1. 自动灯光控制:通过BH1750光照传感器实时采集环境光照强度数据,STM32微控制器对数据进行处理,设定两个光照强度阈值(开启阈值和关闭阈值),当环境光照强度低于开启阈值(如100lx)时,判断环境光线较暗,自动控制LED灯光开启,为视障人士提供微弱照明,帮助其感知周围环境;当环境光照强度高于关闭阈值(如500lx)时,判断环境光线较亮,自动控制LED灯光关闭,避免浪费电能,同时也避免灯光对周围人员造成干扰。
2. 光线状态提示:通过语音模块将环境光线状态播报给视障人士,如“环境光线较暗,灯光已开启,请周围人员注意避让”“环境光线较亮,灯光已关闭”,让视障人士能够了解当前的环境光线状态,做好出行准备。
3. 夜间安全提示:夜间或光线较暗环境下,LED灯光开启后,能够提醒周围的行人与车辆注意到视障人士的存在,主动避让,减少交通事故的发生,提升视障人士夜间出行的安全性。
光线检测技术的应用,使得导盲系统能够适应不同的光照环境,自动调整灯光状态,既为视障人士提供了便利,也提升了出行的安全性。
2.5 SYN6658语音合成技术
2.5.1 语音合成技术概述
语音合成技术(Text-to-Speech,TTS)是指将文本信息转换为语音信号的技术,能够将文字信息以语音的形式播报出来,广泛应用于智能终端、导航设备、辅助设备等领域。在本文设计的超声波导盲系统中,语音合成技术主要用于实现语音报时、语音提示、语音求助等功能,解决视障人士获取时间不便、环境信息感知不及时等问题,为视障人士提供更便捷的辅助支持。
目前常用的语音合成模块主要有SYN6658、SYN7318、JQ8400等,其中SYN6658语音合成模块是北京宇音天下科技有限公司推出的一款高性能中文语音合成模块,具有语音清晰、合成速度快、接口简单、成本低廉等优点,能够实现丰富的语音功能,适合用于导盲系统等辅助设备。
2.5.2 SYN6658语音合成模块原理与特性
SYN6658语音合成模块的工作原理如下:STM32微控制器通过UART串口或SPI接口向SYN6658模块发送控制命令和待合成的文本数据(支持GB2312、GBK、BIG5和Unicode四种编码方式),模块内部的语音合成芯片将文本数据转换为语音信号,经过功率放大后,通过喇叭将语音信号播报出来。模块内集成了多首声音提示音,可用于不同场合的信息提醒、报警等功能,同时支持提示音的连续播放,可通过添加停顿符实现提示音之间的间隔。
SYN6658语音合成模块的核心特性如下:
1. 语音合成效果好:支持中文、英文、数字、符号的语音合成,语音清晰、自然、圆润,语速、音量可调节,适合视障人士听取,能够准确传达信息。
2. 合成速度快:文本合成速度快,响应时间短(小于100ms),能够实时播报文本信息,满足系统实时性的要求。
3. 接口简单:支持UART串口和SPI接口两种通信方式,本文采用UART串口通信,只需将模块的TXD、RXD引脚与STM32微控制器的UART引脚连接,即可实现数据传输,接口电路简单,便于硬件电路的设计与调试。
4. 功能丰富:支持语音报时、语音提示、语音求助、文本播报等多种功能,可根据系统需求自定义语音内容;支持音量调节(0~31级)、语速调节(0~15级),能够适应不同视障人士的需求;集成多首提示音,可直接调用,简化软件设计。
5. 功耗低:工作功耗较低,静态功耗约为5mA,播放语音时的功耗约为30mA,支持低功耗模式,能够有效降低系统功耗,延长电池续航时间。
6. 稳定性高:模块的抗干扰能力强,能够在不同的环境条件下稳定工作,语音播报稳定,无杂音,确保视障人士能够清晰听到语音提示。
此外,SYN6658模块还支持芯片状态查询功能,通过发送特定命令,可获取模块的工作状态(如空闲、合成播音中),便于微控制器对模块进行控制;模块的RST引脚为复位控制引脚,低电平有效,上电后需保证RST引脚有至少50μS的有效复位电平(推荐20ms),确保模块正常启动。
2.5.3 SYN6658语音合成技术在导盲系统中的应用
在超声波导盲系统中,SYN6658语音合成技术

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)