基于c#语言的上位机程序, 控制电机转动,发送脉冲, 直线插补,圆弧插补 #上位机
·
基于c#语言的上位机程序, 控制电机转动,发送脉冲, 直线插补,圆弧插补 #上位机,#圆弧插补
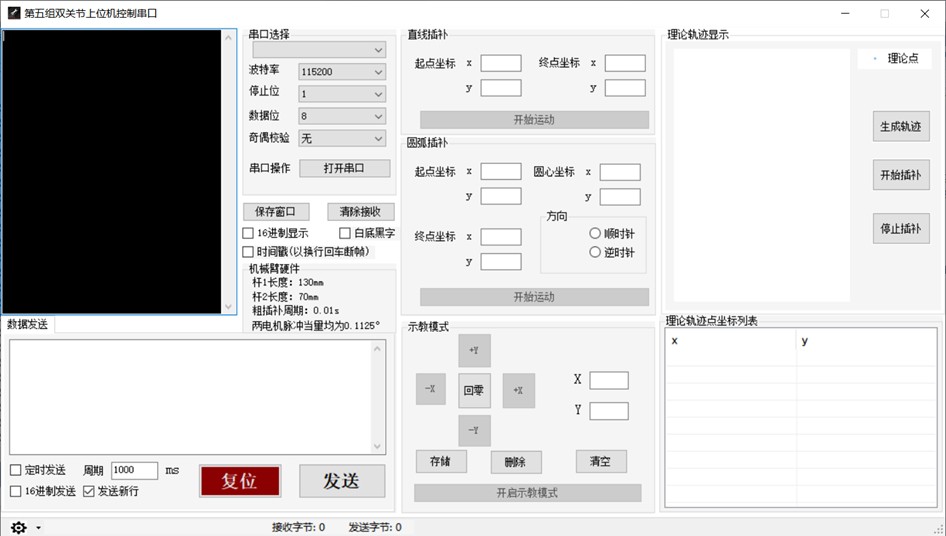
最近在搞一个基于C#的上位机程序,主要任务是控制电机转动,实现直线插补和圆弧插补。听起来挺高大上的,其实说白了就是让电机按照我们设定的路径走,别跑偏了。今天就来聊聊这个过程中的一些心得和代码实现。
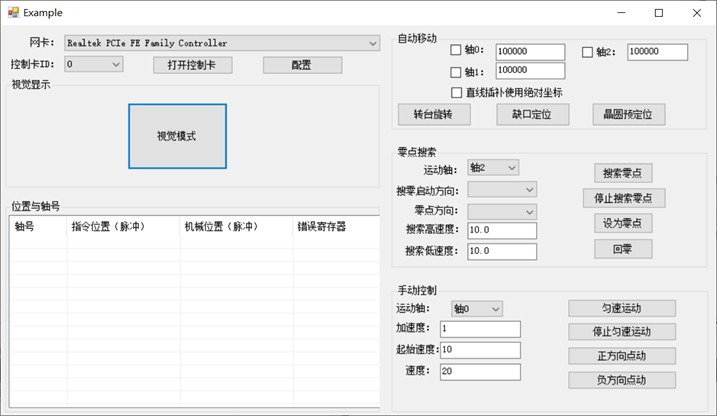
首先,控制电机转动,发送脉冲是基础。我们通过串口或者以太网与电机控制器通信,发送指令让电机转动。这里的关键是脉冲信号的发送频率和数量,直接决定了电机的转速和位置。
// 发送脉冲的简单示例
public void SendPulse(int pulseCount, int frequency)
{
for (int i = 0; i < pulseCount; i++)
{
// 发送脉冲信号
SendSignal();
// 根据频率控制脉冲间隔
Thread.Sleep(1000 / frequency);
}
}这段代码很简单,就是循环发送指定数量的脉冲,每个脉冲之间根据频率控制间隔。频率越高,电机转速越快。
基于c#语言的上位机程序, 控制电机转动,发送脉冲, 直线插补,圆弧插补 #上位机,#圆弧插补
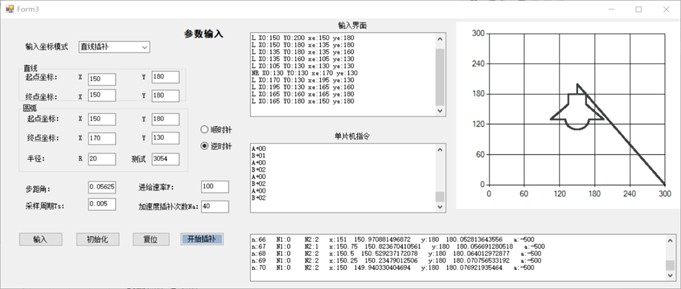
接下来是直线插补。直线插补就是让电机从起点到终点走一条直线。这里我们需要计算起点和终点之间的坐标差,然后根据步长逐步移动。
// 直线插补示例
public void LinearInterpolation(Point start, Point end, int steps)
{
double deltaX = (end.X - start.X) / steps;
double deltaY = (end.Y - start.Y) / steps;
for (int i = 0; i < steps; i++)
{
double currentX = start.X + deltaX * i;
double currentY = start.Y + deltaY * i;
MoveTo(currentX, currentY);
}
}这段代码计算了每一步的坐标增量,然后逐步移动到目标位置。MoveTo函数是实际控制电机移动的函数,这里就不展开了。
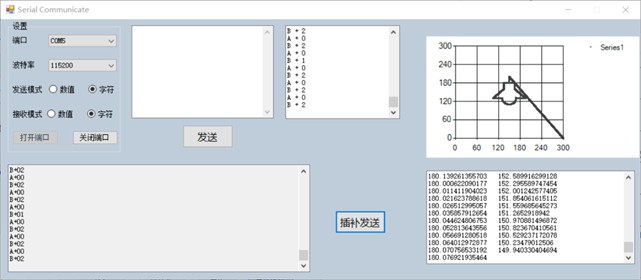
最后是圆弧插补。圆弧插补稍微复杂一点,需要计算圆弧的起点、终点和圆心,然后根据步长逐步移动。
// 圆弧插补示例
public void CircularInterpolation(Point start, Point end, Point center, int steps)
{
double startAngle = Math.Atan2(start.Y - center.Y, start.X - center.X);
double endAngle = Math.Atan2(end.Y - center.Y, end.X - center.X);
double deltaAngle = (endAngle - startAngle) / steps;
for (int i = 0; i < steps; i++)
{
double currentAngle = startAngle + deltaAngle * i;
double currentX = center.X + Math.Cos(currentAngle) * Radius;
double currentY = center.Y + Math.Sin(currentAngle) * Radius;
MoveTo(currentX, currentY);
}
}这段代码计算了每一步的角度增量,然后根据角度计算当前坐标,逐步移动到目标位置。Radius是圆弧的半径,这里假设是已知的。
总的来说,控制电机转动、直线插补和圆弧插补的实现并不复杂,关键是要理解背后的数学原理,然后通过代码实现。希望这些代码和解释能对你有所帮助,如果有问题,欢迎留言讨论。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)