恶劣天气监控 “失明”?这款 AI 模型,让智慧城市安防全天候在线
点击蓝字
关注我们
关注并星标
从此不迷路
计算机视觉研究院

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
https://pmc.ncbi.nlm.nih.gov/articles/PMC12808097/pdf/41598_2025_Article_31660.pdf
计算机视觉研究院专栏
Column of Computer Vision Institute
本文提出的一套自注意力驱动多尺度目标检测框架,专门攻克雨、雾、雪、沙尘、低光照场景,在公开恶劣天气数据集上拿下97.25% 准确率,全面超越 YOLOv5、YOLOv8、DETR 等主流模型,成为智慧城市监控的 “全天候眼睛”。

PART/1
痛点
行业痛点:恶劣天气,直接击穿传统监控
智慧城市交通、广场、社区安防,长期被四大难题卡脖子:
- 能见度极差:雾、雨、雪、沙尘让画面模糊,物体边界消失,算法直接失效
- 小目标易漏检:遗弃物、小零件、远处车辆占像素少,常规模型直接忽略
- 误报率超高:光影突变、树叶晃动、雨水反光,都被当成 “异常目标”
- 夜间完全失效:纯可见光摄像头在黑暗中几乎没有检测能力
传统背景减法、运动分析、甚至主流 YOLO 系列模型,在恶劣天气下性能大幅跳水,既不抗干扰,也抓不住细节,无法满足实时安防与交通管控需求。
PART/2
技术创新
技术创新:四模块深度融合,从 “看得清” 到 “判得准”
研究团队没有简单堆砌模块,而是打造ADBM–PFSM–ASM–SAO-YOLO 一体化 pipeline,把背景净化→特征筛选→遗弃判定→精准检测全程打通,实现端到端鲁棒检测。
1. ADBM+PFSM:先把雨雾噪声 “滤干净”
- ADBM 自适应双背景模型
同时维护短期背景(快速适应光照突变)和长期背景(保持场景稳定),精准分离真实目标与雨雾、抖动、反光等干扰。
- PFSM 像素级有限状态机
逐像素判定:背景 / 遮挡 / 静态前景 / 动态前景,把可疑静止区域精准框出,减少后续检测压力。
2. 热成像 + 可见光双模态融合:黑夜雾天也 “通透”
这是模型抗恶劣天气的核心杀手锏:在FPN 特征金字塔 P3 层直接融合可见光 + 热成像特征:
-
可见光:保留纹理、边缘、颜色细节
-
热成像:提供强对比度,穿透雾、霾、黑夜两者互补,让模型在完全无光、浓雾场景下依然稳定识别。
3. SAO-YOLO+SODHead:专门 “盯紧” 小目标
- SAO-YOLO 自注意力优化主干
加入自注意力层,自动聚焦重要区域,忽略背景噪声。
- SODHead 小目标解耦头
专为小物体、被遮挡物体设计,强化细粒度特征,解决 “小目标看不见” 难题。
- 多尺度特征提取
同时捕捉大物体全局结构与小物体局部细节。
4. ASM 遗弃物判定:只报警 “真隐患”
通过两个规则过滤误报:
-
目标持续静止时长达标
-
目标与行人保持安全距离自动判定是否为遗弃物品,大幅降低无效报警。
PART/3
实验
实测效果:全面碾压 SOTA,恶劣天气稳拿第一
模型在DAWN 恶劣天气数据集(雾 / 雨 / 雪 / 沙尘 / 低光)严格测试,关键指标:
-
准确率:97.25%
-
精确率:95.33%
-
召回率:96.37%
-
F1-score:96.55%
-
mAP@0.5:97.81%
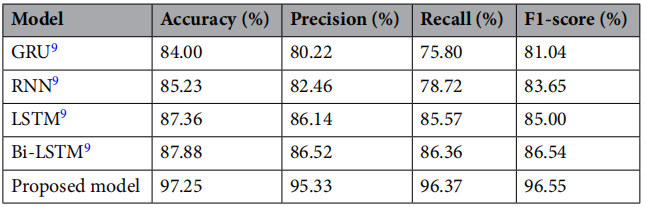
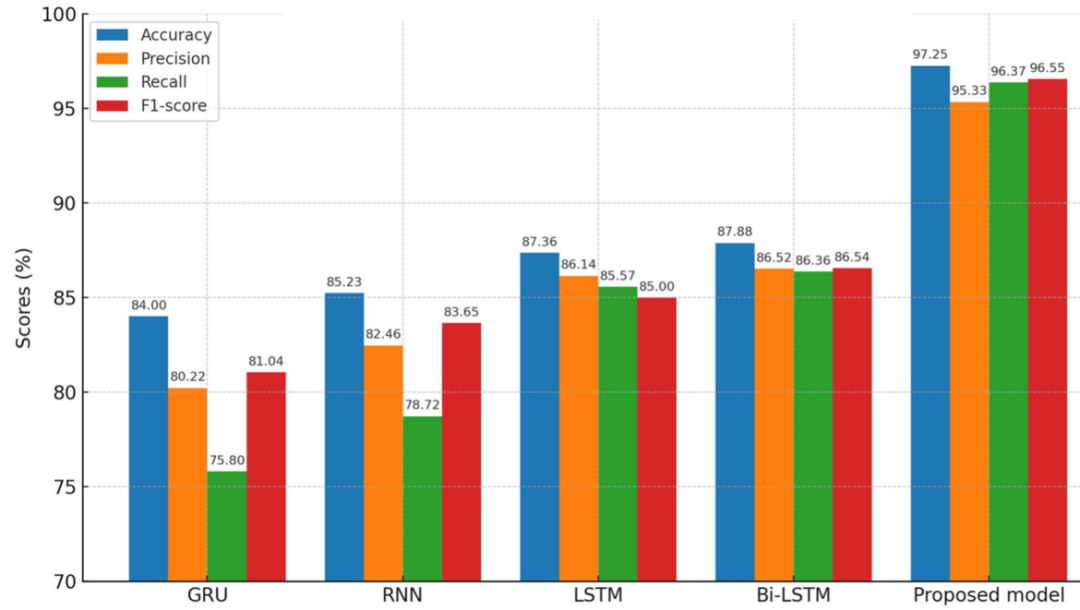
【本文模型 vs 传统循环网络(GRU/RNN/LSTM/Bi-LSTM)对比柱状图】
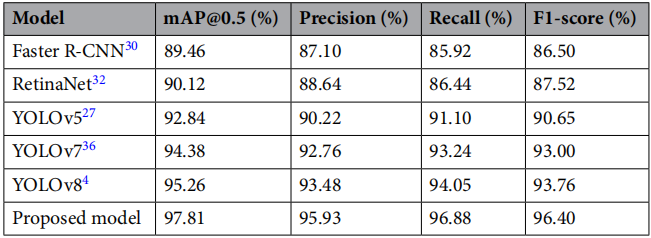
【本文模型 vs YOLOv5/v7/v8、Faster R-CNN、DETR 精度对比表】
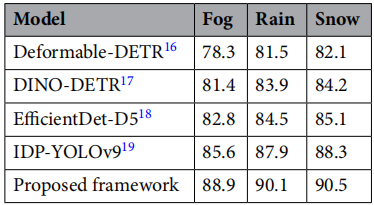
【雾 / 雨 / 雪不同天气下 mAP 对比】
核心优势一目了然:
-
相比传统循环模型,精度提升近 10 个百分点
-
相比当前最强 YOLOv8,mAP 高出 2.5%
-
雾 / 雨 / 雪三类恶劣天气,mAP 均超 88%
-
推理速度36ms / 帧,满足近实时监控部署
-
跨数据集泛化强,迁移到 COCO 仅下降 2.1% mAP
PART/4
落地价值
落地价值:智慧城市安防,真正全天候守护
这套模型不是实验室 “花瓶算法”,而是面向真实场景的工程化方案:
✅ 适用场景
-
城市道路交通监测(车辆、行人、异常障碍物)
-
广场 / 车站 / 社区遗弃物品实时预警
-
雾天、夜间、沙尘天智能安防
-
智慧路口、自动驾驶车载感知
✅ 核心价值
-
恶劣天气不降级、不漏检、不误报
-
小目标 / 遮挡物体检出率大幅提升
-
双模态融合黑夜也能稳定工作
-
轻量化设计,可部署在Jetson、树莓派、边缘盒子
未来团队还将进一步做模型压缩、量化,降低功耗与延迟,让它能在更多低成本 IoT 设备上大规模落地。
PART/5
结语
雨雾、沙尘、黑夜,不再是智能监控的 “软肋”。这一套自注意力 + 多尺度 + 双模态融合的检测框架,把 “看不清、测不准、漏检多” 变成 “全天候、高精度、低误报”,为智慧城市交通与公共安全,筑起一道可靠的AI 全天候防线。
有相关需求的你可以联系我们!


END

转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的论文算法新框架,提供论文一键下载,并分享实战项目。研究院主要着重”技术研究“和“实践落地”。研究院会针对不同领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!
往期推荐
🔗

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献32条内容
已为社区贡献32条内容

所有评论(0)