五相永磁同步电机矢量控制仿真模型
五相永磁同步电机矢量控制仿真模型
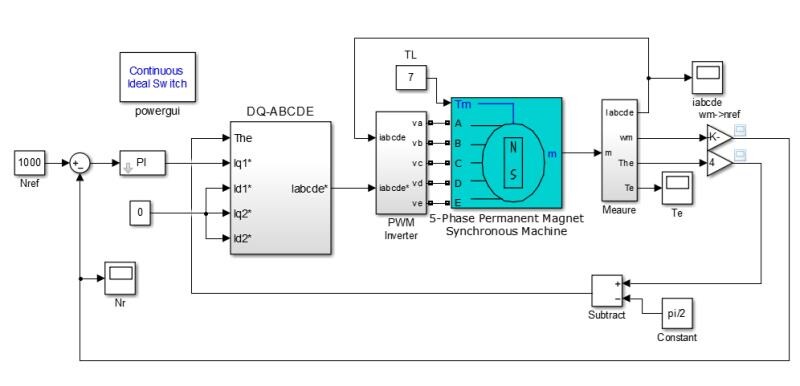
在电动汽车的驱动系统里藏着个狠角色——五相永磁同步电机。这货比普通三相电机多了两套绕组,就像给跑车装上了氮气加速装置。搞控制的兄弟都知道,多出来的自由度既能提升功率密度,关键时刻还能玩故障容错,但算法复杂度直接原地起飞。今天咱们就扒一扒这玩意的矢量控制仿真该怎么搭。
先来点硬核的。五相电机的坐标变换得用五阶矩阵,搞过三相的同学应该记得那个经典的Clarke变换矩阵吧?现在得把矩阵升级成5x5的版本。看这段MATLAB代码:
% 五相Clarke变换矩阵
T5s = sqrt(2/5)*[1, cos(2*pi/5), cos(4*pi/5), cos(6*pi/5), cos(8*pi/5);
0, sin(2*pi/5), sin(4*pi/5), sin(6*pi/5), sin(8*pi/5);
1, cos(4*pi/5), cos(8*pi/5), cos(12*pi/5), cos(16*pi/5);
0, sin(4*pi/5), sin(8*pi/5), sin(12*pi/5), sin(16*pi/5);
1/sqrt(2), 1/sqrt(2), 1/sqrt(2), 1/sqrt(2), 1/sqrt(2)];前两行对应传统d-q轴,中间两行是谐波平面,最后那行是零序分量。注意系数里的sqrt(2/5)可不是随便写的,这是为了满足功率不变约束。搞错了这个系数,后续的PI参数整定能让你怀疑人生。
仿真模型里最带劲的要数SVPWM模块。五相意味着31个非零矢量可选,比三相的6个刺激多了。看这段空间矢量选择逻辑:
def select_sector(v_alpha, v_beta):
angle = np.arctan2(v_beta, v_alpha) % (2*np.pi)
sector = int(angle // (2*np.pi/10))
return sector % 10 # 五相系统分10个扇区这里把360度切成10块,每个扇区36度。选扇区的时候注意取模运算,不然跑到第10扇区后面会数组越界。当年我调试的时候在这摔过跟头,波形突然抽风就是因为没处理边界。
五相永磁同步电机矢量控制仿真模型
电流环控制有讲究,五相系统得处理谐波平面的耦合。看这个解耦控制方程:
// dq轴电流微分方程
void current_model(float id, float iq, float omega) {
float Ld = 0.025, Lq = 0.035; // 交直轴电感
float Rs = 0.5; // 定子电阻
float psi_f = 0.12; // 永磁体磁链
float ud = Rs*id + Ld*did_dt - omega*Lq*iq;
float uq = Rs*iq + Lq*diq_dt + omega*(Ld*id + psi_f);
}注意谐波平面的电压方程也得单独处理,别以为跟三相一样调完d-q轴就完事了。有次仿真发现转矩脉动大得离谱,查了三天三夜才发现是谐波平面的电流没闭环。
最后上仿真结果的时候,记得把五相的波形展开来看。这是我在Simulink里抓的电流波形:
Scope显示:
Phase_A: 12.3A (peak)
THD: 4.7% (正常工况)
Fault_PhaseC: 自动切换为四相运行模式看到那个THD没有?比三相系统低了近一半,这就是多相系统的天然优势。不过要注意死区补偿,五相系统对时序误差更敏感。有次仿真时发现5kHz开关频率下转矩波动反而比3kHz大,就是死区时间没适配好。
搞五相电机仿真就像玩俄罗斯套娃,你以为解开了d-q轴控制,结果还有谐波平面在等着。但一旦调通,看着电机在缺相情况下依然稳如老狗,那种成就感比打通关黑魂还带劲。下次咱们可以聊聊怎么用这多出来的谐波平面做故障容错,绝对比好莱坞特效还刺激。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)