直流电机转速电流双闭环控制Simulink仿真探索
·
直流电机转速电流双闭环控制simulink仿真
在电机控制领域,直流电机以其良好的调速性能和转矩特性备受青睐。而转速电流双闭环控制策略更是能够让直流电机在复杂工况下实现稳定、高效运行。今天就来唠唠基于Simulink的直流电机转速电流双闭环控制仿真。
双闭环控制基本原理
转速电流双闭环控制系统,顾名思义,存在转速环和电流环。转速环作为外环,负责根据给定转速与实际转速的偏差,输出一个电流给定值。电流环作为内环,将转速环输出的电流给定值与实际电流进行比较,通过调节使实际电流跟踪给定电流,进而控制电机的转矩。这样的嵌套结构,能有效提高系统的抗干扰能力和动态响应性能。
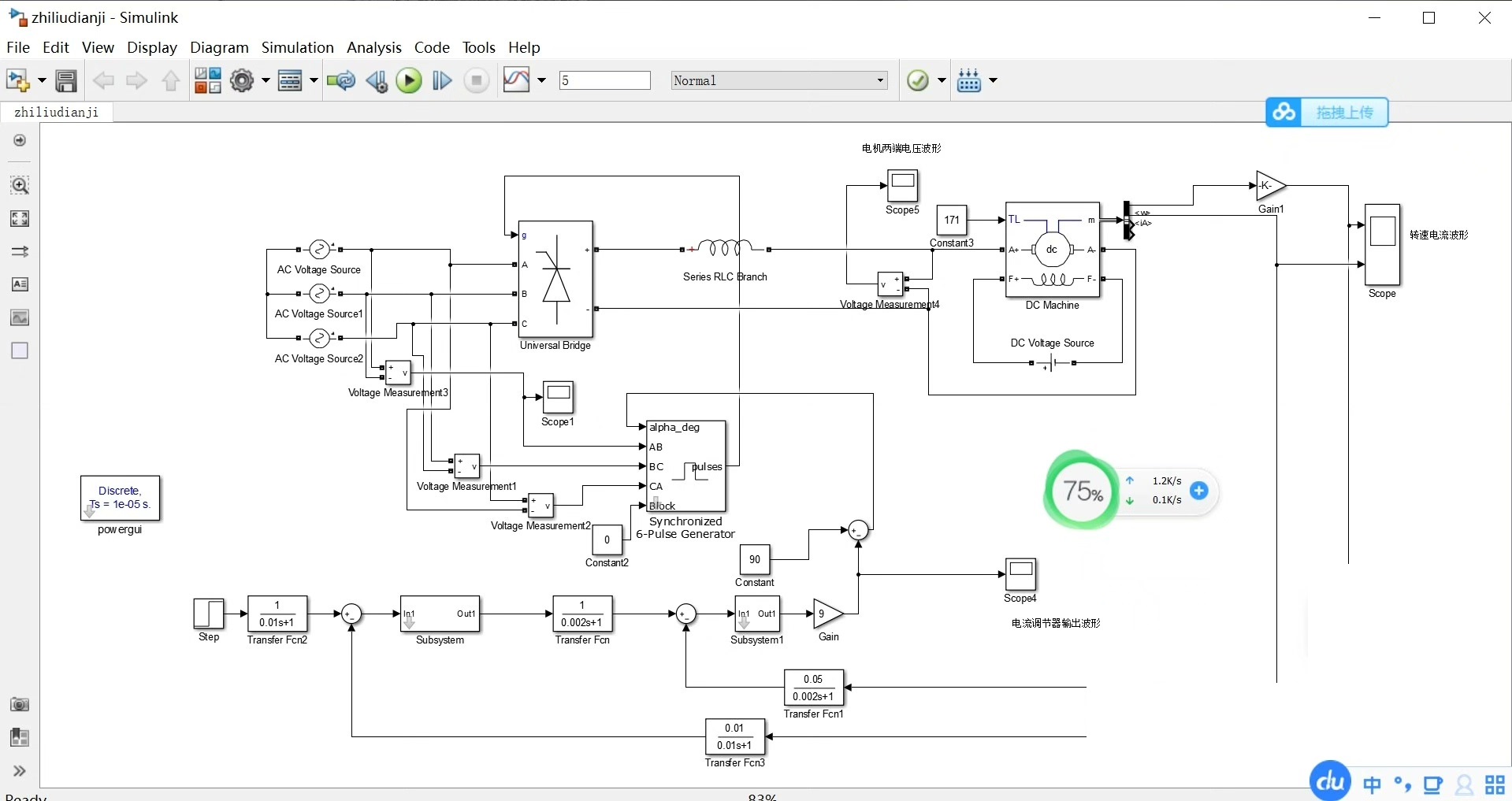
Simulink模型搭建
- 电机模块:在Simulink库中找到“DC Motor”模块,它代表我们要控制的直流电机。该模块有几个关键参数需要设置,比如电枢电阻$Ra$、电感$La$、电机转矩常数$Kt$和反电动势常数$Ke$等。这些参数决定了电机的基本电气和机械特性。例如,电枢电阻$Ra$影响电机电枢回路的电流大小,$Ra$越大,在相同电压下电流就越小。
% 假设这些参数值,实际根据电机手册确定
Ra = 0.5;
La = 0.001;
Kt = 0.1;
Ke = 0.1; - 转速环PI调节器:转速环通常采用PI调节器,用于消除转速稳态误差并改善动态响应。在Simulink中添加“PI Controller”模块,设置比例系数$Kp$和积分系数$Ki$。比例系数$Kp$决定了调节器对偏差的快速响应能力,$Kp$越大,调节速度越快,但可能会导致系统超调增大;积分系数$Ki$则用于消除稳态误差,$Ki$越大,稳态误差消除得越快,但也可能引起积分饱和问题。
% 转速环PI参数
Kp_speed = 10;
Ki_speed = 1; - 电流环PI调节器:与转速环类似,电流环也使用PI调节器。它快速响应电流的变化,确保电机电流能快速跟踪给定值。同样设置比例系数$Kp$和积分系数$Ki$,这两个参数与转速环的参数相互配合,共同优化系统性能。
% 电流环PI参数
Kp_current = 5;
Ki_current = 0.5; - 反馈环节:从电机模块引出实际转速和实际电流信号,分别反馈到转速环和电流环的输入端,与给定值进行比较,形成闭环控制。
仿真结果分析
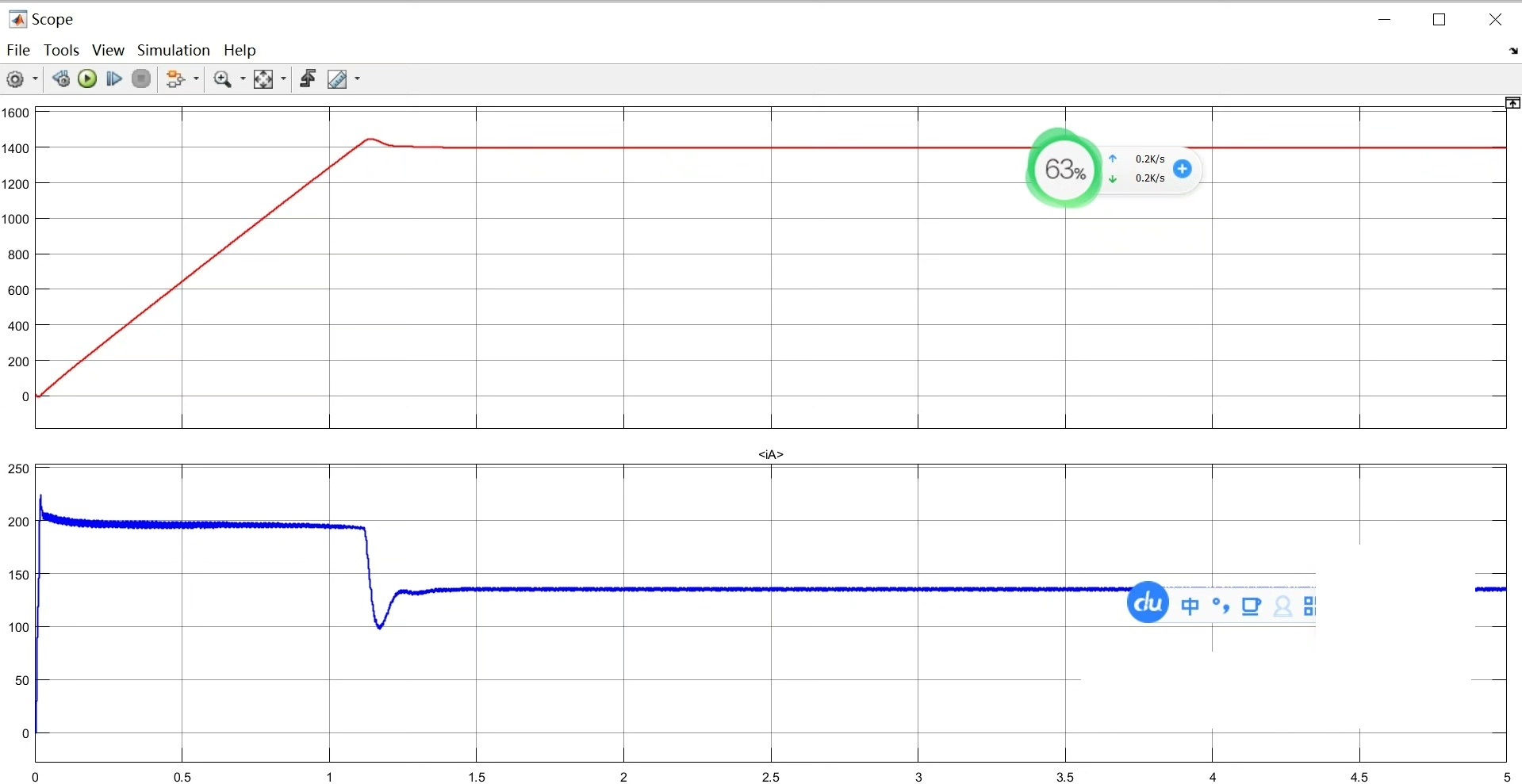
运行仿真后,我们可以观察到电机转速和电流的变化情况。当给定一个阶跃转速信号时,在起始阶段,电流迅速上升以提供足够的转矩使电机加速,这是电流环快速响应的结果。随着转速接近给定值,转速环开始发挥作用,逐渐减小电流给定值,使电机平稳运行在给定转速。
直流电机转速电流双闭环控制simulink仿真
例如,从仿真数据中提取转速和时间数据进行绘图分析:
% 假设仿真结果存储在变量中
time = simout.time;
speed = simout.signals.values(:,1);
figure;
plot(time, speed);
xlabel('Time (s)');
ylabel('Speed (rpm)');
title('DC Motor Speed Response');从绘制的转速响应曲线可以清晰看到,系统在短时间内达到给定转速,并且超调量较小,稳态精度高,这充分展示了转速电流双闭环控制策略在直流电机控制中的有效性和优越性。
通过Simulink仿真,我们深入了解了直流电机转速电流双闭环控制的原理与实现过程,为实际电机控制系统的设计和优化提供了有力的参考。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)