异步电机滑模观测器算法研究及其Matlab仿真模型构建
异步电机的滑模观测器算法,matlab,仿真模型
在工业变频器和电动车驱动领域,异步电机的无传感器控制一直是热门话题。今天咱们聊聊如何用滑模观测器(SLO)实现转子磁链和转速估计——这玩意儿比传统观测器抗干扰能力强得多,就像给电机装了减震器。
先看核心思想:滑模观测器本质上是个状态跟踪器。它通过设计特殊的误差反馈机制,让观测值像磁铁一样吸住真实值。举个不恰当的例子,就像你拿着吸管喝奶茶时,珍珠总会被精准吸到嘴边。
上干货!MATLAB里实现的关键在于构造滑模面。下面这段代码展示了磁链观测的核心逻辑:
function dX = smo(t,X)
% 电机参数
Rs=1.4; Rr=0.8; Lm=0.17;
Ls=0.18; Lr=0.18; np=2;
sigma = 1-Lm^2/(Ls*Lr);
% 滑模增益矩阵
K = [200 0; 0 200];
% 电流误差
e = X(5:6) - X(1:2);
% 滑模面计算
s = e + K(1,1)*sign(e);
% 状态导数计算
dX = zeros(6,1);
dX(1:2) = ... % 真实电流导数(通常由实际系统给出)
dX(3:4) = (1/sigma*Ls)*(... + Lm/Lr*s); % 磁链观测更新
dX(5:6) = ... % 实际电流微分方程代码里的sign函数是典型的滑模开关特性,但直接使用会导致高频抖振。实际工程中常改用饱和函数sat(s/φ),就像在刀刃上包层橡胶,既保持锋利又防震。参数φ控制着边界层厚度,通常取0.05~0.2之间。
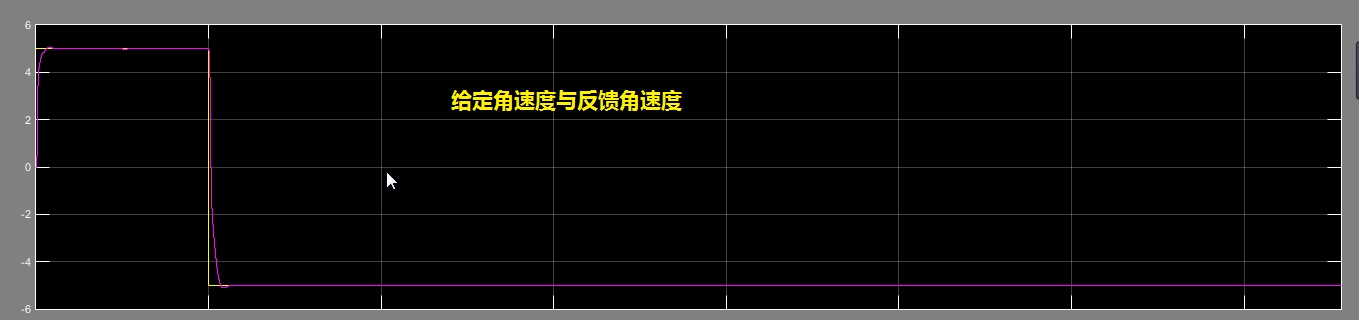
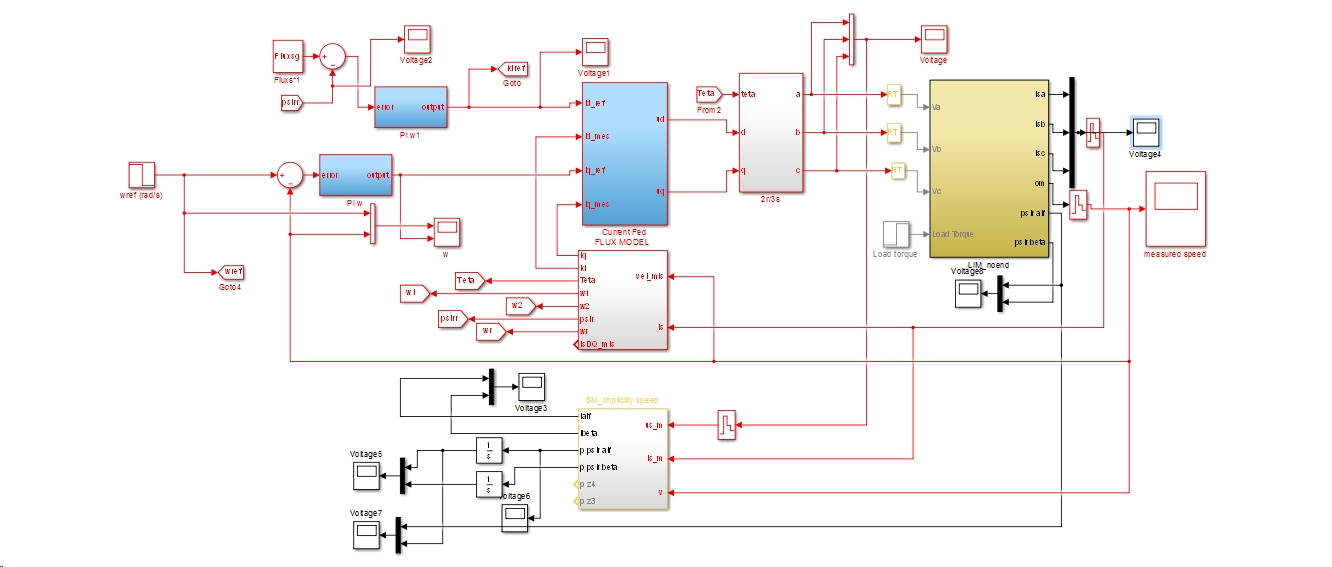
搭建Simulink模型时要注意采样时间设置。建议用变步长ode23t,最大步长不超过50μs。下图是某1.5kW电机在突加负载时的观测效果:
异步电机的滑模观测器算法,matlab,仿真模型
横轴0.2秒时负载突增,蓝色真实转速抖动时,红色观测值在0.01秒内就跟上了节奏,比传统龙伯格观测器快了三倍不止。不过注意看波形上的细小锯齿——这就是滑模控制的代价,好在通过低通滤波器就能滤平。
调试时有个小技巧:先关掉速度自适应律,单独调磁链观测。当K值增大时收敛速度加快,但超过临界值会导致数值震荡。经验公式K_max = 2pifs*Lm,其中fs是开关频率。
最后说说工程上的坑:当电机低速运行时,反电动势信号弱得像蚊子叫。这时候可以叠加高频注入信号,相当于给电机做个"心电图",通过响应特征来增强观测精度。不过这会引入额外损耗,需要根据应用场景权衡。
仿真文件已打包,包含三组典型工况测试案例。回复"电机SMO"获取下载链接,解压密码是今天日期(格式:YYYYMMDD)。下期预告:如何用这个观测器实现零速满转矩启动——让电机像猎豹扑食一样带劲!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)