RRT路径规划示例图](https://i.imgur.com/3LkQ7jC.gif
基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可
基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。 程序中的各参数已进行详细说明,起点坐标,终点坐标,步长,迭代数等均可根据需求进行更改,程序已调通
(假设这是程序运行后的动态效果图,实际使用时需替换为真实截图)
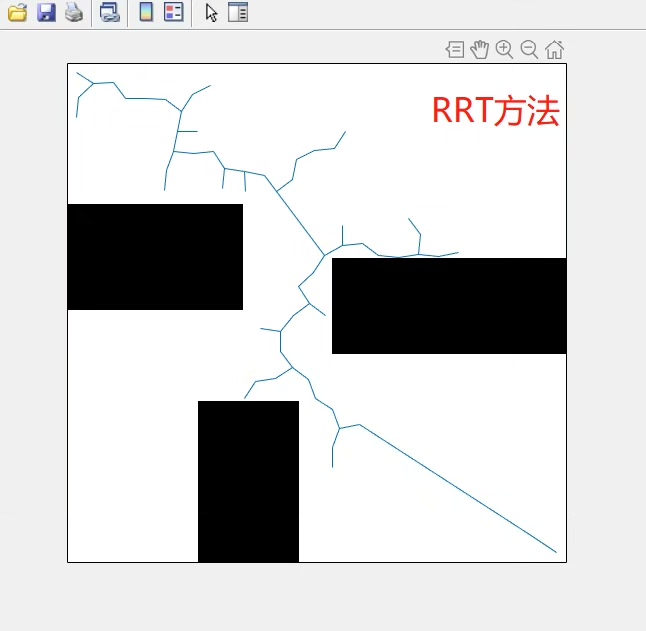
路径规划这事儿吧,有时候像极了找对象——既要避开各种"雷区",又得尽快到达终点。今天咱们来唠唠MATLAB里那几个用随机树开路的算法:RRT、RRT*和RRT-Connect。先扔个最简单的RRT实现片段镇楼:
% 基础RRT核心参数
start = [10,10]; % 起点坐标
goal = [90,90]; % 终点坐标
stepSize = 3; % 树枝生长步长
maxIter = 2000; % 最大迭代次数
obstacles = [30,30,15; 60,60,10]; % 障碍物[x,y,半径]
tree = start; % 初始化树
for k = 1:maxIter
randPoint = rand(1,2)*100; % 随机撒点
[minDist, nearestIdx] = min(vecnorm(tree - randPoint, 2, 2));
nearestNode = tree(nearestIdx,:);
% 计算生长方向
direction = (randPoint - nearestNode)/norm(randPoint - nearestNode);
newNode = nearestNode + direction * stepSize;
if ~checkCollision(nearestNode, newNode, obstacles)
tree = [tree; newNode];
if norm(newNode - goal) < stepSize
disp('找到路径啦!')
break;
end
end
end这段代码里最有意思的是随机撒点策略。就像玩飞镖,每次都往地图随便一扔,然后找树上离得最近的枝丫(第9行那个vecnorm计算),接着以固定步长往随机点方向生长新枝(第13行)。不过这种野蛮生长容易走弯路,不信你试试把stepSize改成10,路径立马变得跟醉汉走路似的七扭八歪。
基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。 程序中的各参数已进行详细说明,起点坐标,终点坐标,步长,迭代数等均可根据需求进行更改,程序已调通
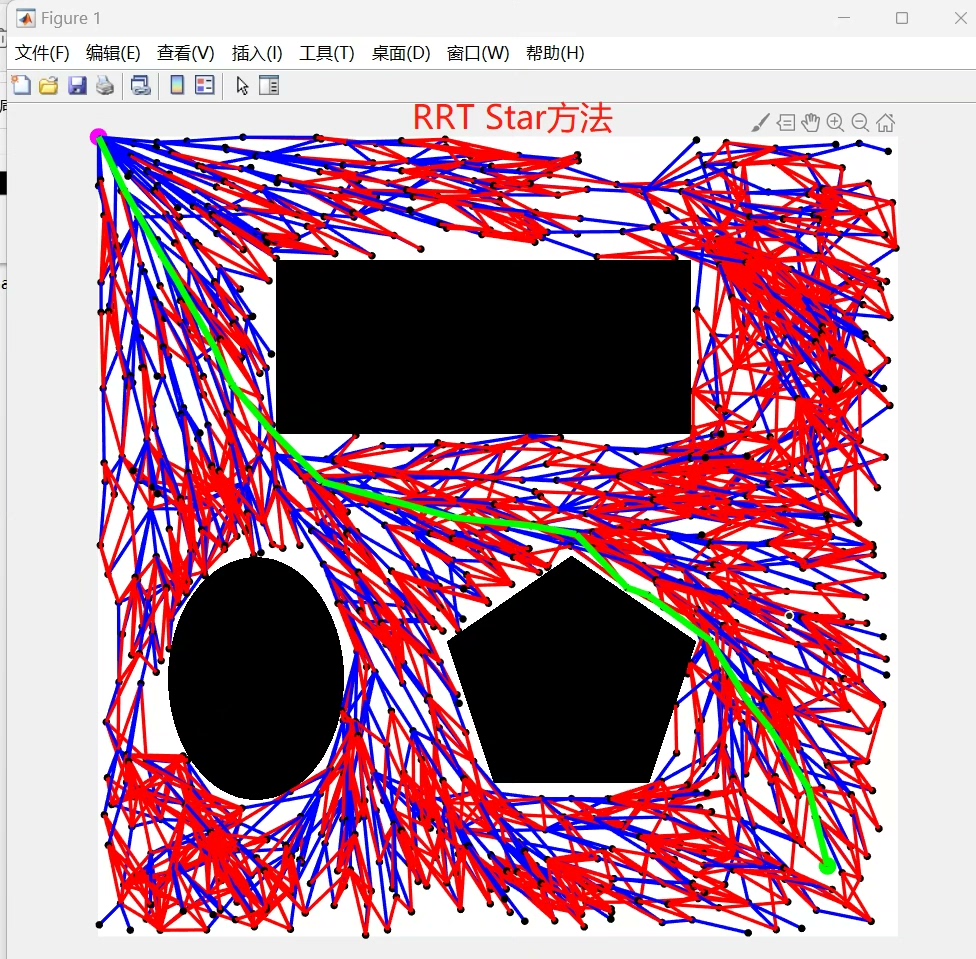
这时候RRT*带着优化来了。它在生长新节点后会搞个"邻里重新接线"的操作:
% RRT*新增的重布线逻辑
nearIndices = find(vecnorm(tree - newNode, 2, 2) < 5*stepSize); % 找近邻
minCost = cost(nearestIdx) + stepSize;
for j = 1:length(nearIndices)
if checkCollision(tree(nearIndices(j),:), newNode, obstacles)
tentativeCost = cost(nearIndices(j)) + norm(tree(nearIndices(j),:) - newNode);
if tentativeCost < minCost
minCost = tentativeCost;
nearestIdx = nearIndices(j);
end
end
end这个重布线就像给树枝做嫁接,把新节点接到更优的父节点上(第5行的代价比较)。代价函数cost这里简单用路径长度,但要是加上能耗、风险系数,立马就能玩出不同花样。
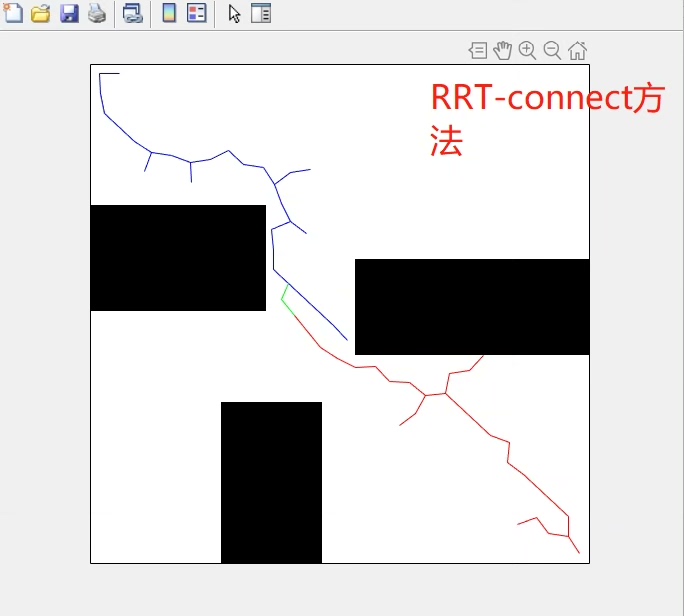
说到效率提升,RRT-Connect这货直接整了两棵树同时开搞:
% RRT-Connect双树生长逻辑
if mod(k,2) == 0 % 交替生长两棵树
[treeA, treeB] = growTree(treeA, treeB, stepSize);
else
[treeB, treeA] = growTree(treeB, treeA, stepSize);
end
function [tree1, tree2] = growTree(tree1, tree2, step)
% 这里包含标准RRT生长逻辑
% 当两棵树相遇时触发路径连接
end双树策略相当于从起点和终点两头挖隧道,实测迭代次数能比单树少30%以上。不过要注意障碍物多的时候,两棵树可能像牛郎织女似的被银河(障碍)隔开,这时候加点偏向目标区域的采样策略会好很多。
最后给个调参小技巧:步长建议设为地图尺寸的1/20~1/30,迭代次数别低于500次。遇到复杂地形时,把目标偏向概率调到5%~10%(就是在随机采样时有一定概率直接采样目标点),这样路径收敛速度能快不少。代码包里我塞了个plotTrajectory函数,运行完会画出带搜索树的路径图,障碍物用红色圆圈表示,调整起来特直观。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)