深入探索牵引力控制系统(TCS):从标定到算法实现
牵引力控制系统,TCS标定,TCS控制算法,制动滑移和驱动滑转可以通过轮胎与地面的附着特性解决,TCS发动机转矩算法,PID转矩计算,主动制动压力计算
在汽车的世界里,牵引力控制系统(Traction Control System,简称 TCS)就像是一位默默守护的骑士,保障着车辆在各种路况下的行驶安全与稳定。今天咱们就来深入聊聊 TCS 的标定、控制算法,还有其中涉及的制动滑移、驱动滑转等问题。
TCS 标定:一切的基础
TCS 标定是整个系统的基石,它就像是给系统设置了一套精确的“行动指南”。标定的过程需要考虑车辆的各种参数,比如发动机特性、轮胎与地面的附着特性等。想象一下,我们要让 TCS 能在不同的路面条件下都发挥最佳性能,就像让一个运动员适应不同的比赛场地一样。
# 简单模拟 TCS 标定参数设置
class TCSCalibration:
def __init__(self):
self.engine_max_torque = 300 # 发动机最大扭矩,单位:N·m
self.tire_friction_coefficient = 0.8 # 轮胎与地面的摩擦系数
def get_engine_max_torque(self):
return self.engine_max_torque
def get_tire_friction_coefficient(self):
return self.tire_friction_coefficient
# 创建 TCS 标定实例
tcs_calibration = TCSCalibration()
print(f"发动机最大扭矩: {tcs_calibration.get_engine_max_torque()} N·m")
print(f"轮胎与地面的摩擦系数: {tcs_calibration.get_tire_friction_coefficient()}")在这段代码里,我们创建了一个 TCSCalibration 类,用来模拟 TCS 标定过程中一些关键参数的设置。通过这个类,我们可以方便地获取发动机最大扭矩和轮胎与地面的摩擦系数。这些参数在后续的 TCS 控制算法中会起到重要作用。
制动滑移和驱动滑转:附着特性的魔法
制动滑移和驱动滑转是车辆行驶中常见的问题,不过别担心,轮胎与地面的附着特性就是解决它们的“魔法钥匙”。当车辆制动时,如果车轮的转速突然降低,就可能出现制动滑移;而在加速时,车轮转速过快则可能导致驱动滑转。TCS 系统就是利用轮胎与地面的附着特性,来调节车轮的转速,避免这些问题的发生。
# 模拟根据附着特性调整车轮转速
def adjust_wheel_speed(actual_speed, ideal_speed, friction_coefficient):
if actual_speed > ideal_speed:
# 驱动滑转,降低车轮转速
adjustment = (actual_speed - ideal_speed) * friction_coefficient
new_speed = actual_speed - adjustment
elif actual_speed < ideal_speed:
# 制动滑移,提高车轮转速
adjustment = (ideal_speed - actual_speed) * friction_coefficient
new_speed = actual_speed + adjustment
else:
new_speed = actual_speed
return new_speed
# 模拟实际情况
actual_wheel_speed = 60 # 实际车轮转速,单位:km/h
ideal_wheel_speed = 50 # 理想车轮转速,单位:km/h
friction_coefficient = tcs_calibration.get_tire_friction_coefficient()
new_wheel_speed = adjust_wheel_speed(actual_wheel_speed, ideal_wheel_speed, friction_coefficient)
print(f"调整后的车轮转速: {new_wheel_speed} km/h")这段代码模拟了根据轮胎与地面的附着特性来调整车轮转速的过程。当实际车轮转速大于理想转速时,说明可能出现了驱动滑转,此时降低车轮转速;反之,当实际转速小于理想转速时,可能存在制动滑移,需要提高车轮转速。
TCS 控制算法:核心的智慧
TCS 控制算法是整个系统的核心,它就像是 TCS 的“大脑”,指挥着各个部件协同工作。其中,TCS 发动机转矩算法和 PID 转矩计算是非常重要的部分。
TCS 发动机转矩算法
TCS 发动机转矩算法的目的是根据车辆的行驶状态,精确地控制发动机输出的转矩。当检测到驱动滑转时,发动机转矩需要适当降低,以减少车轮的驱动力;而在正常行驶时,发动机则可以输出合适的转矩,保证车辆的动力性能。
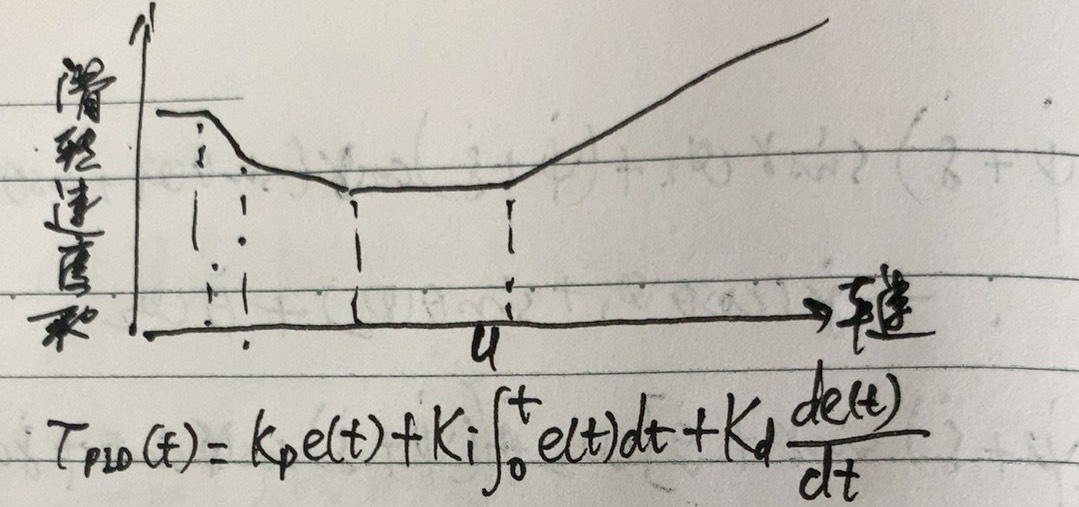
PID 转矩计算
PID(比例 - 积分 - 微分)控制是一种常见的控制算法,在 TCS 中也有着广泛的应用。PID 转矩计算可以根据当前的误差(比如实际车轮转速与理想转速的差值),动态地调整发动机的转矩输出。
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp # 比例系数
self.ki = ki # 积分系数
self.kd = kd # 微分系数
self.prev_error = 0
self.integral = 0
def compute(self, error):
self.integral += error
derivative = error - self.prev_error
output = self.kp * error + self.ki * self.integral + self.kd * derivative
self.prev_error = error
return output
# 设置 PID 参数
kp = 0.5
ki = 0.1
kd = 0.2
pid = PIDController(kp, ki, kd)
# 模拟转速误差
speed_error = actual_wheel_speed - ideal_wheel_speed
torque_adjustment = pid.compute(speed_error)
print(f"根据 PID 计算的转矩调整量: {torque_adjustment} N·m")在这段代码中,我们实现了一个简单的 PID 控制器。通过设置比例系数、积分系数和微分系数,根据当前的转速误差计算出转矩调整量。这个调整量可以用来控制发动机的转矩输出,从而实现对车轮转速的精确控制。
主动制动压力计算
除了控制发动机转矩,TCS 还可以通过主动制动来调节车轮转速。主动制动压力计算就是确定需要施加多大的制动压力,以达到理想的控制效果。
# 简单模拟主动制动压力计算
def calculate_brake_pressure(speed_error, friction_coefficient):
pressure = speed_error * friction_coefficient * 10 # 简单的计算模型
return pressure
brake_pressure = calculate_brake_pressure(speed_error, friction_coefficient)
print(f"计算得到的主动制动压力: {brake_pressure} Pa")这段代码模拟了主动制动压力的计算过程。根据转速误差和轮胎与地面的摩擦系数,计算出需要施加的制动压力。
牵引力控制系统,TCS标定,TCS控制算法,制动滑移和驱动滑转可以通过轮胎与地面的附着特性解决,TCS发动机转矩算法,PID转矩计算,主动制动压力计算
通过以上的分析和代码实现,我们对牵引力控制系统(TCS)有了更深入的了解。从标定到控制算法,再到制动压力计算,每一个环节都至关重要,它们共同保障了车辆在行驶过程中的安全与稳定。希望这篇文章能让你对 TCS 有更清晰的认识,也能感受到汽车技术背后的魅力。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)