探索MATLAB/SIMULINK中MMC整流器的双闭环载波移相调制之旅
MATLAB/SIMULINK,MMC整流器仿真,双闭环控制,载波移相调制,PI控制电容电压均衡,N=6,端口相电压13个电平,仅供学习参考
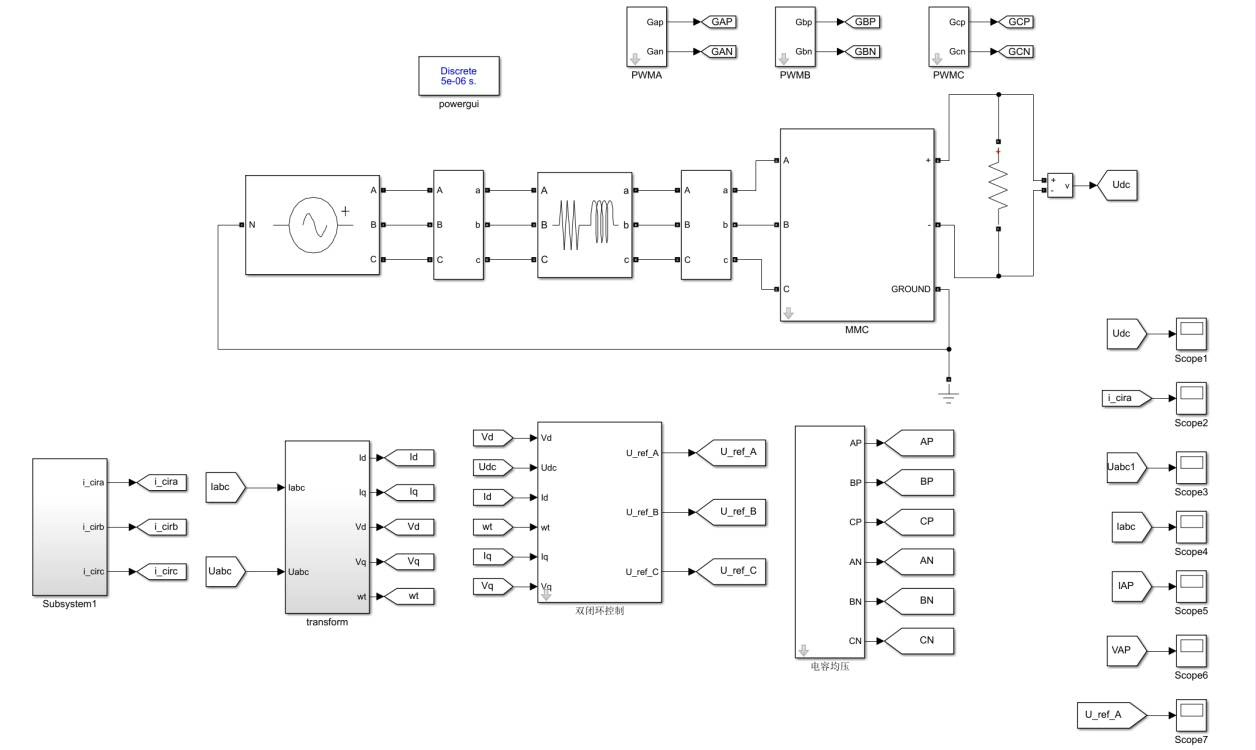
在电力电子领域,MMC(模块化多电平换流器)整流器因其诸多优势备受关注。今天咱们就来聊聊在MATLAB/SIMULINK环境下,MMC整流器的双闭环控制,搭配载波移相调制,以及PI控制电容电压均衡这些有趣的技术点,设定N = 6,能实现端口相电压13个电平,仅为大家学习参考。
MMC整流器基础理解
MMC整流器由多个子模块级联构成,在电力传输、电能质量改善等方面大显身手。每个子模块就像是一个小的“电力加工厂”,它们协同工作,完成复杂的电能转换任务。
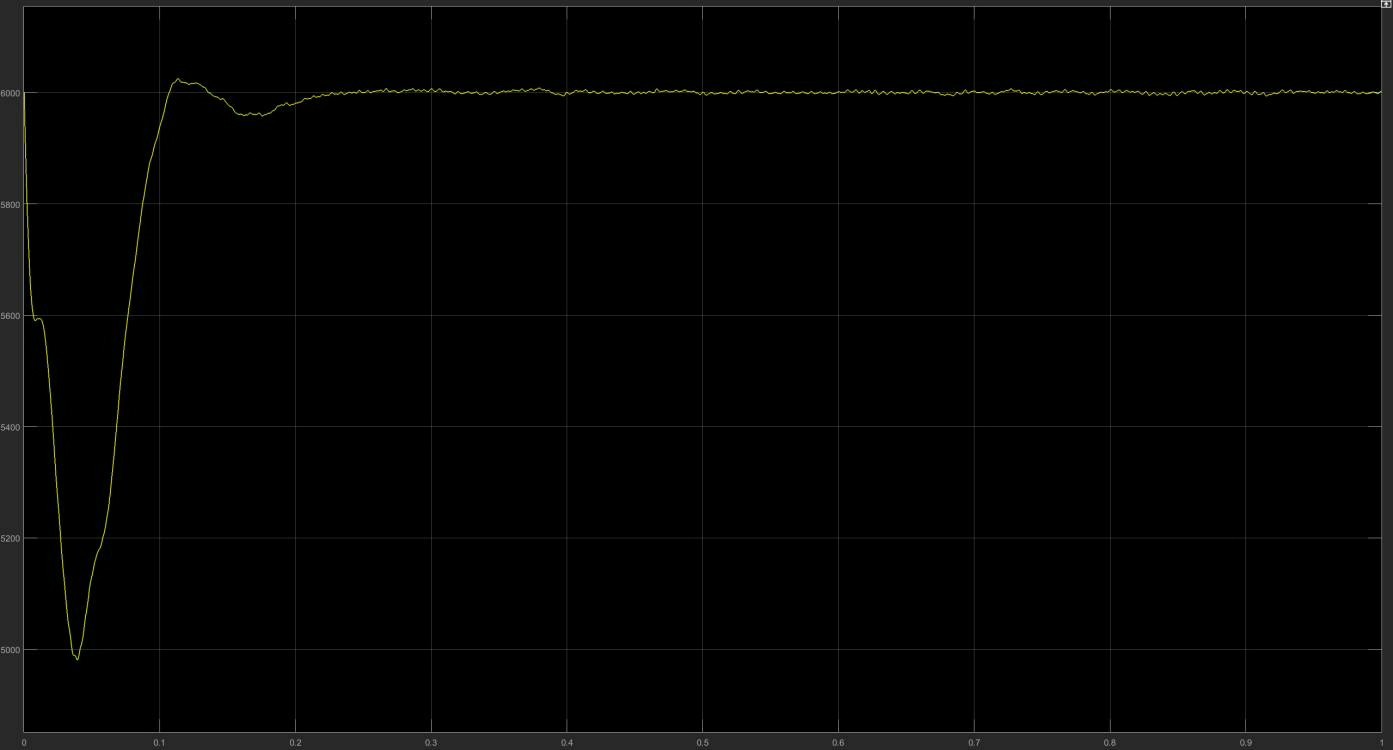
双闭环控制
双闭环控制是MMC整流器控制策略的核心之一。一般来说,外环控制直流电压,内环控制交流电流。这样的设计能够有效提升系统的稳定性和动态响应能力。
在MATLAB/SIMULINK中搭建双闭环控制模型时,外环电压PI控制器的代码大致如下:
% 外环电压PI控制器参数
Kp_v = 0.5;
Ki_v = 0.1;
error_v = ref_voltage - measured_voltage;
integral_v = integral_v + error_v * Ts;
output_v = Kp_v * error_v + Ki_v * integral_v;这里refvoltage是设定的参考直流电压,measuredvoltage是测量得到的实际直流电压,Ts是采样时间。通过比例系数Kpv和积分系数Kiv的调整,不断修正误差,让实际电压尽可能逼近参考电压。
MATLAB/SIMULINK,MMC整流器仿真,双闭环控制,载波移相调制,PI控制电容电压均衡,N=6,端口相电压13个电平,仅供学习参考
内环电流PI控制器与之类似:
% 内环电流PI控制器参数
Kp_i = 0.2;
Ki_i = 0.05;
error_i = ref_current - measured_current;
integral_i = integral_i + error_i * Ts;
output_i = Kp_i * error_i + Ki_i * integral_i;这里refcurrent是参考交流电流,measuredcurrent是实际测量的交流电流。内外环相互配合,实现对MMC整流器的精准控制。
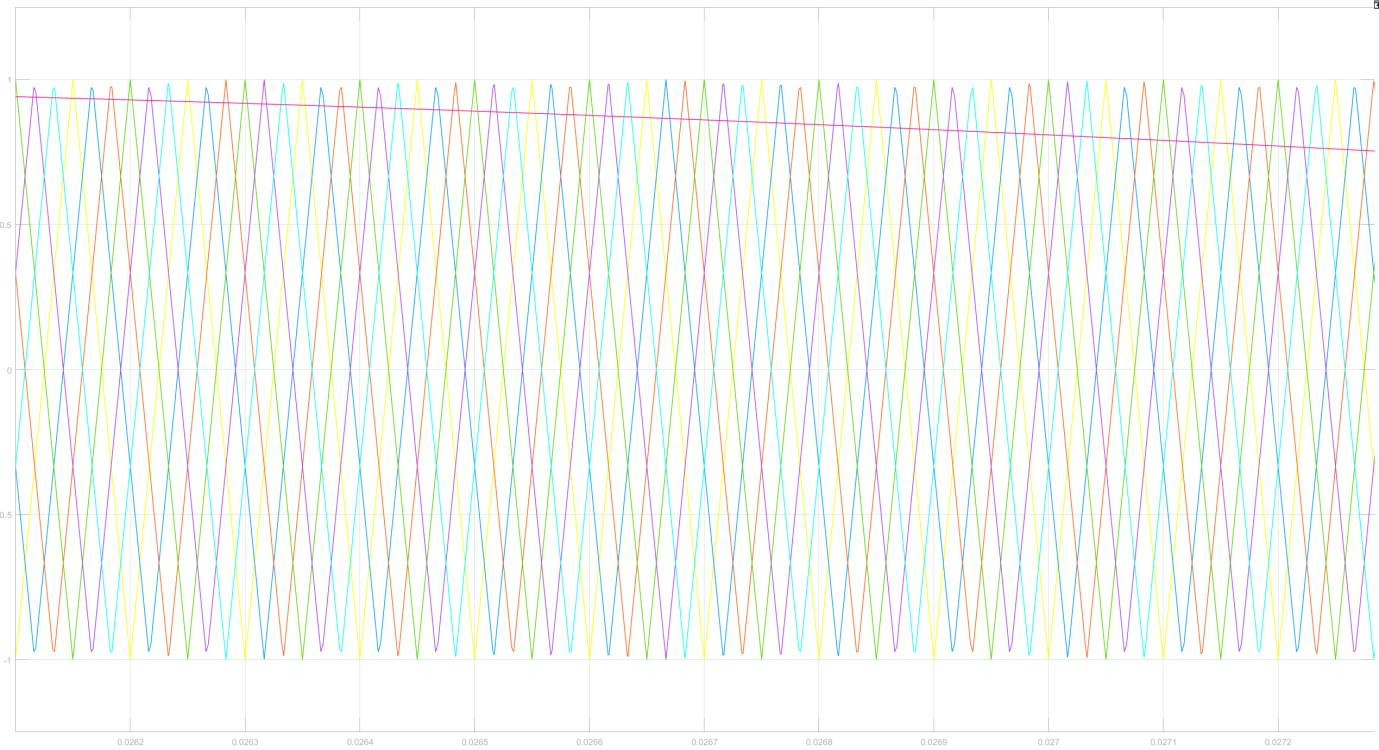
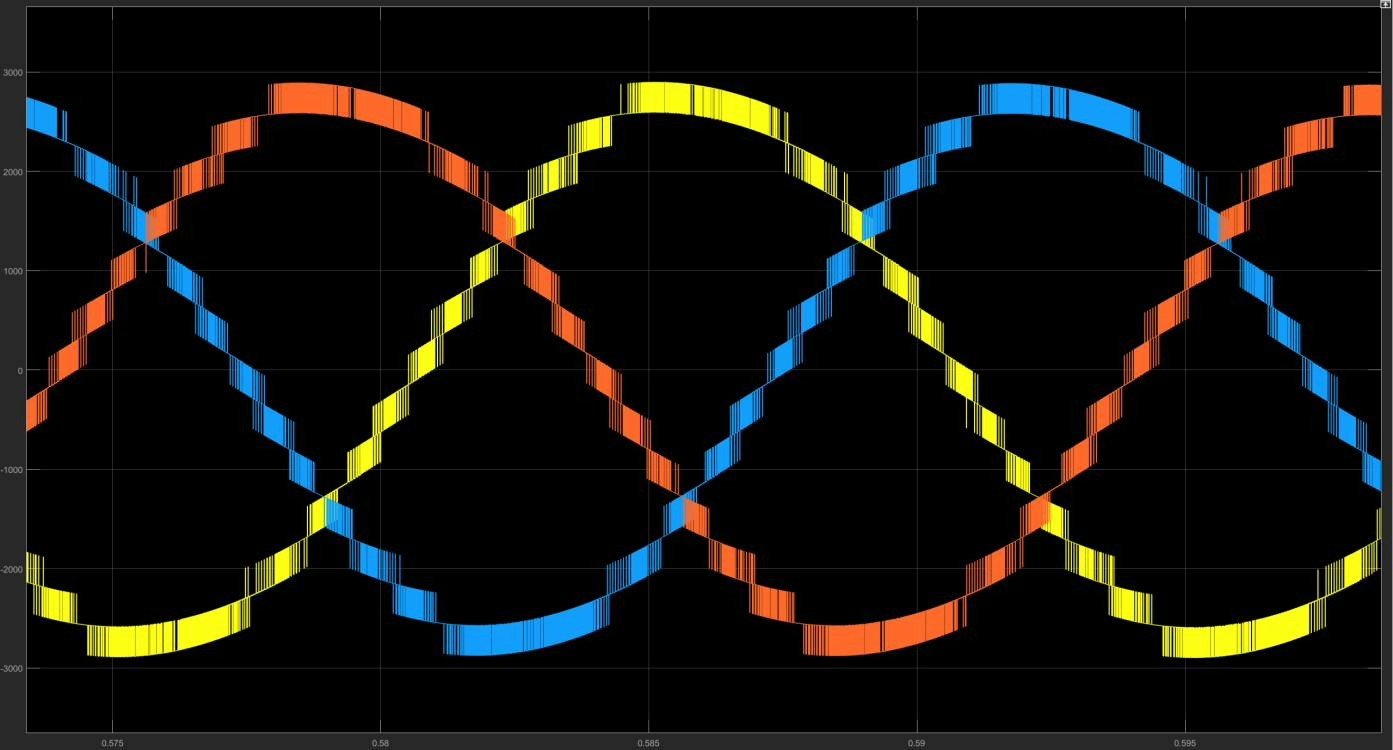
载波移相调制
载波移相调制是让MMC整流器输出多电平的关键手段。当N = 6时,我们能得到端口相电压13个电平。想象一下,就像给电能输出搭建了多层的“台阶”,让电压输出更加平滑。
在MATLAB中实现载波移相调制,代码思路如下:
% 载波移相调制参数
N = 6;
carrier_freq = 500; % 载波频率
carrier_phase_shift = 2 * pi / N;
for k = 1:N
carrier(k) = sin(2 * pi * carrier_freq * t + (k - 1) * carrier_phase_shift);
end这里创建了N个载波信号,每个载波之间有carrierphaseshift的相位差。调制信号与这些载波信号比较,就可以产生不同电平的输出。
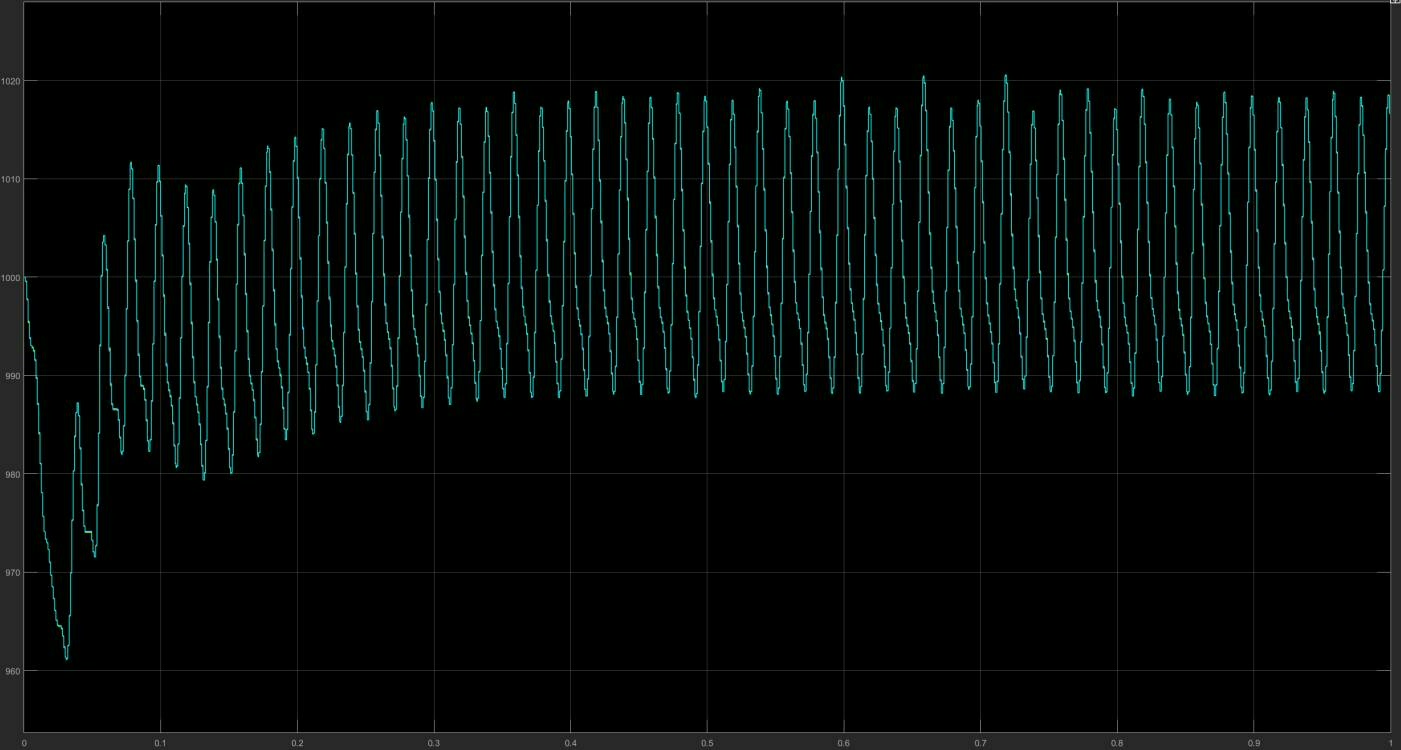
PI控制电容电压均衡
MMC整流器中有众多子模块电容,保持它们电压均衡很重要。PI控制是常用的办法。
% 电容电压均衡PI控制器参数
Kp_c = 0.3;
Ki_c = 0.08;
error_c = average_cap_voltage - cap_voltage(k);
integral_c = integral_c + error_c * Ts;
output_c = Kp_c * error_c + Ki_c * integral_c;这里averagecapvoltage是所有子模块电容电压的平均值,cap_voltage(k)是第k个子模块的电容电压。通过PI控制器调整,使得各个子模块电容电压都能趋向于平均值,实现电压均衡。
通过在MATLAB/SIMULINK中合理搭建上述模型,我们就能对MMC整流器进行高效的仿真,深入学习其工作原理和控制策略。希望这篇文章能为大家在相关领域的学习和研究提供一些帮助。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)