最近在折腾图像匹配相关的东西,顺手记录几个实战中容易掉头发的问题。模板匹配这玩意儿看着简单,真要在复杂场景用起来,坑比想象中多得多
·
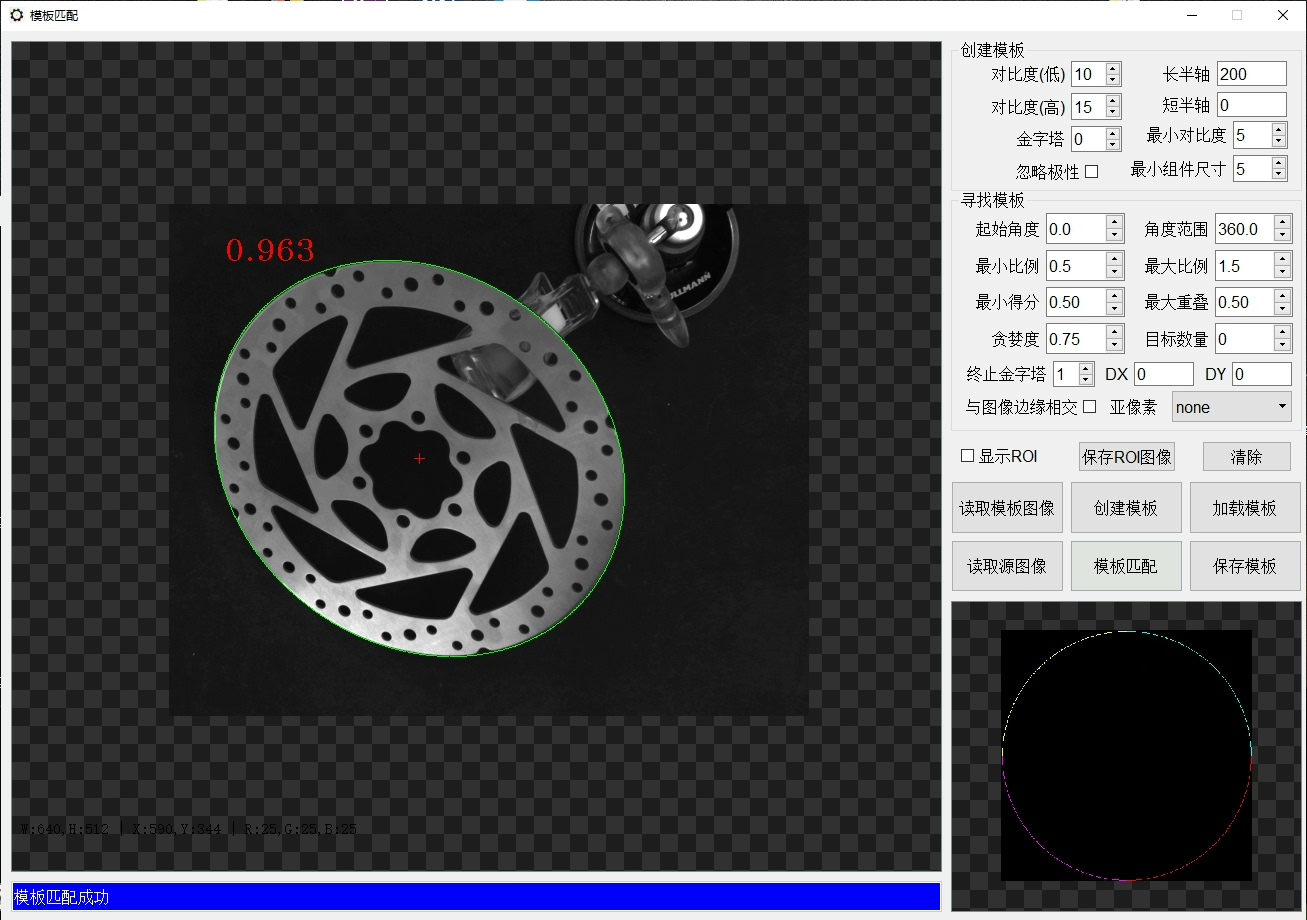
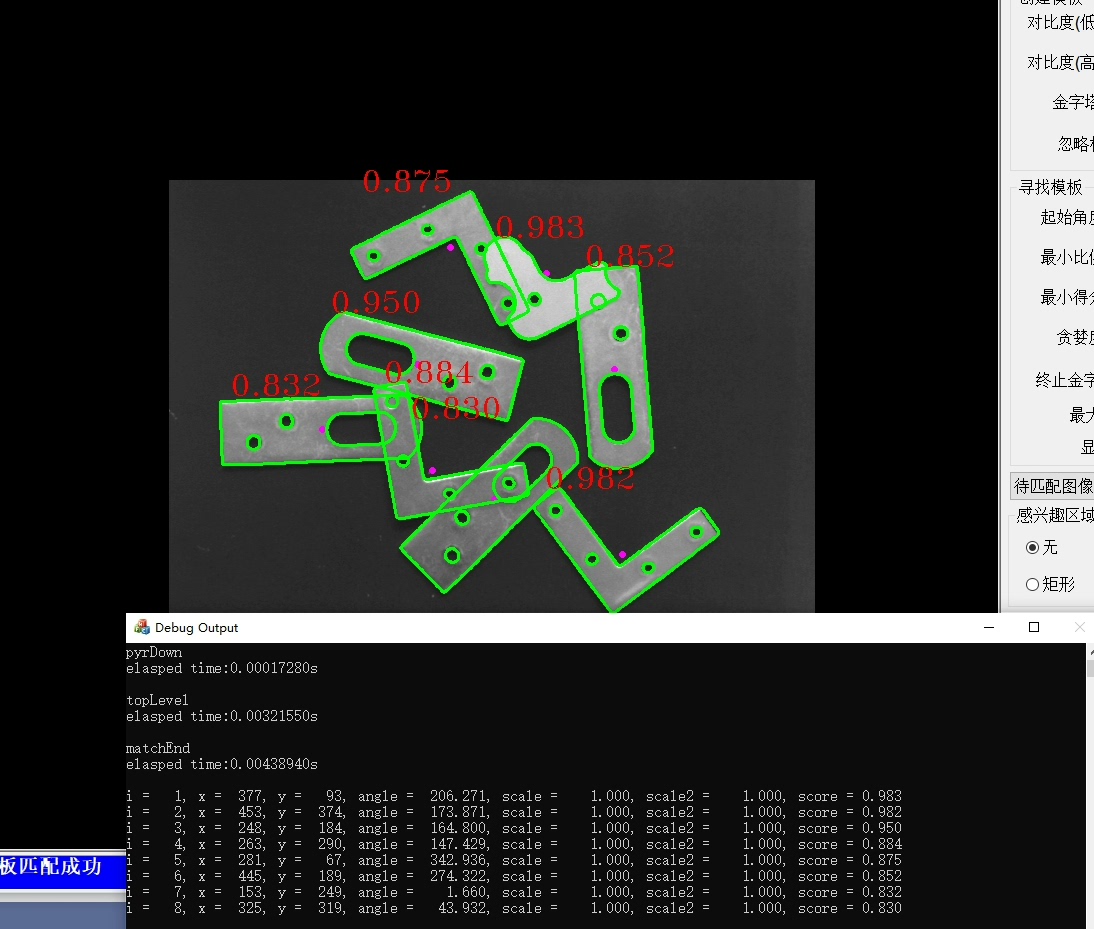
自研模板匹配,多模板匹配,变形、透视匹配,形状匹配,C++/C#,openCV
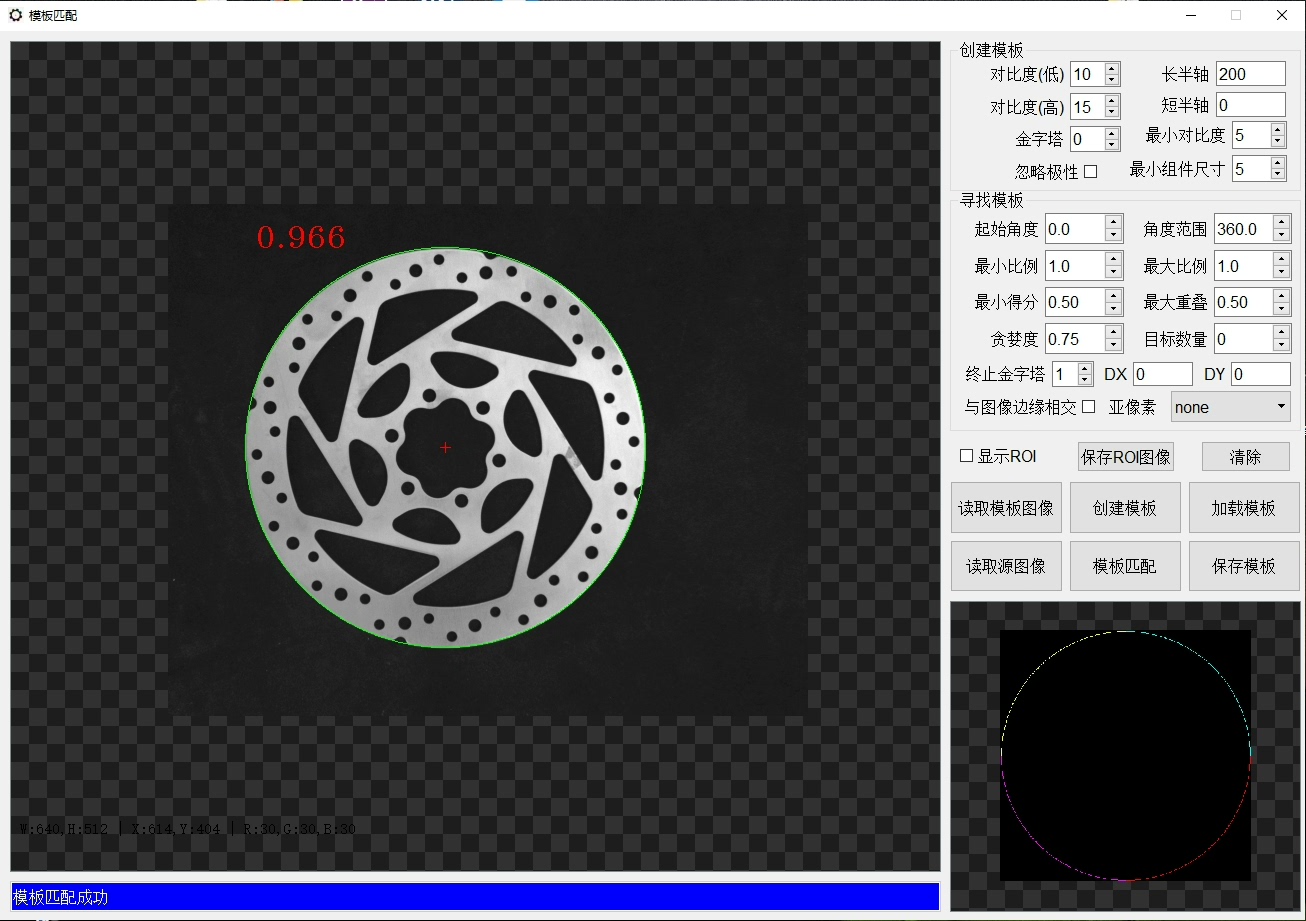
先说最基础的模板匹配。OpenCV的matchTemplate函数大家应该都用过,但实际项目中经常遇到模板变形的情况。比如流水线上被压弯的零件,用普通模板匹配直接歇菜。这时候得自己搞点骚操作:
// 常规操作,但只能应对刚性变换
Mat result;
matchTemplate(srcImg, templateImg, result, TM_CCOEFF_NORMED);
double minVal, maxVal;
Point minLoc, maxLoc;
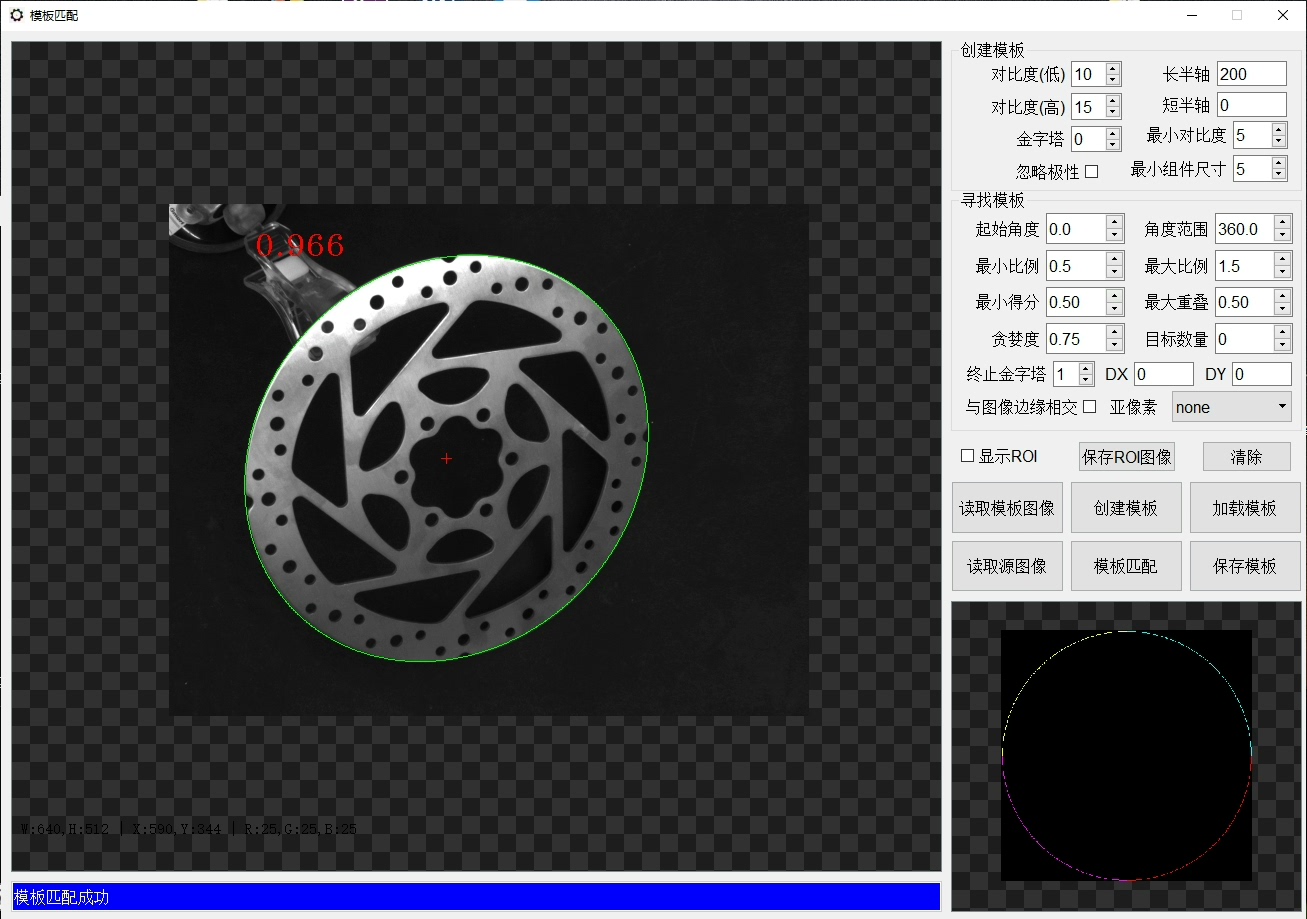
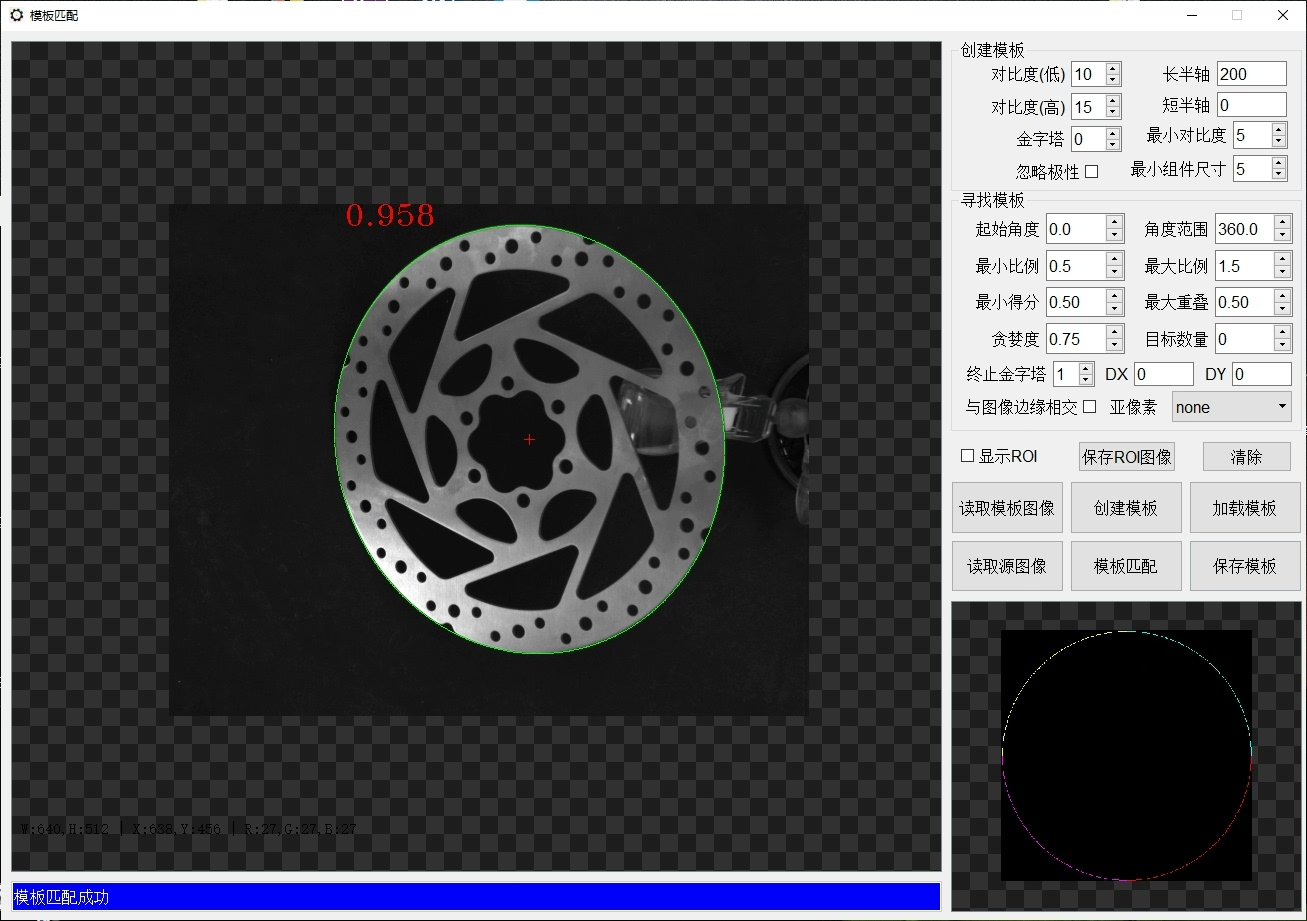
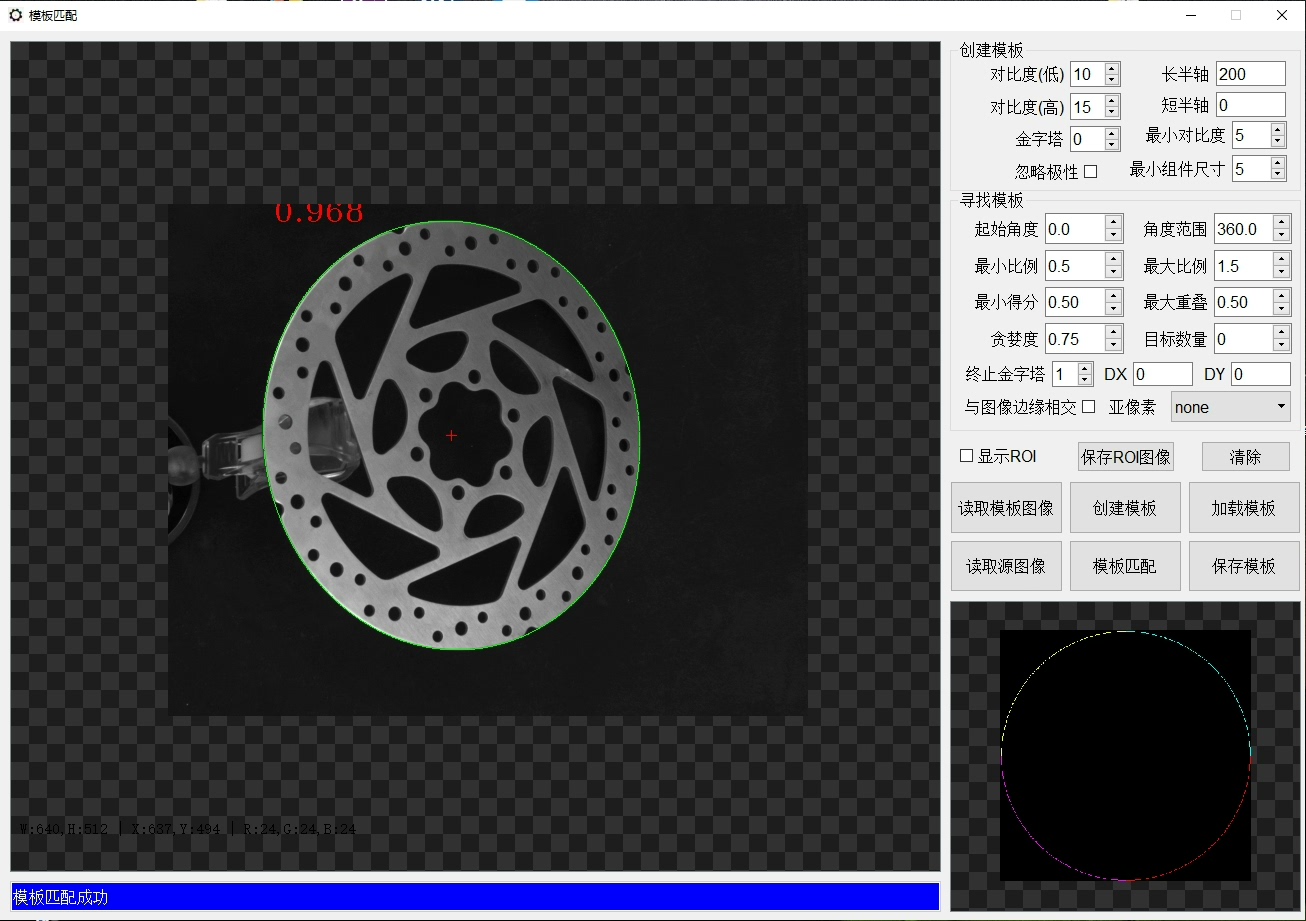
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc);这种标准流程的局限很明显:目标稍微转个角度或者透视变形就匹配不上。于是得在预处理阶段动手脚——对模板做多种形变生成样本库,相当于人工造数据增强。不过要注意控制样本数量,不然内存和速度都要爆炸。
遇到多个相似模板的情况,建议用金字塔下采样+多线程并行处理。这里有个C#里容易踩的坑:EmguCV的ROI处理在并行时可能会内存越界,得用锁或者复制Mat对象:
Parallel.For(0, templateCount, i => {
Mat warpedTemplate = WarpTemplate(baseTemplate); // 形变处理
using (Mat localImg = sourceImg.Clone())
{
MatchTemplate(localImg, warpedTemplate, out var matchResult);
// 结果存线程安全容器
}
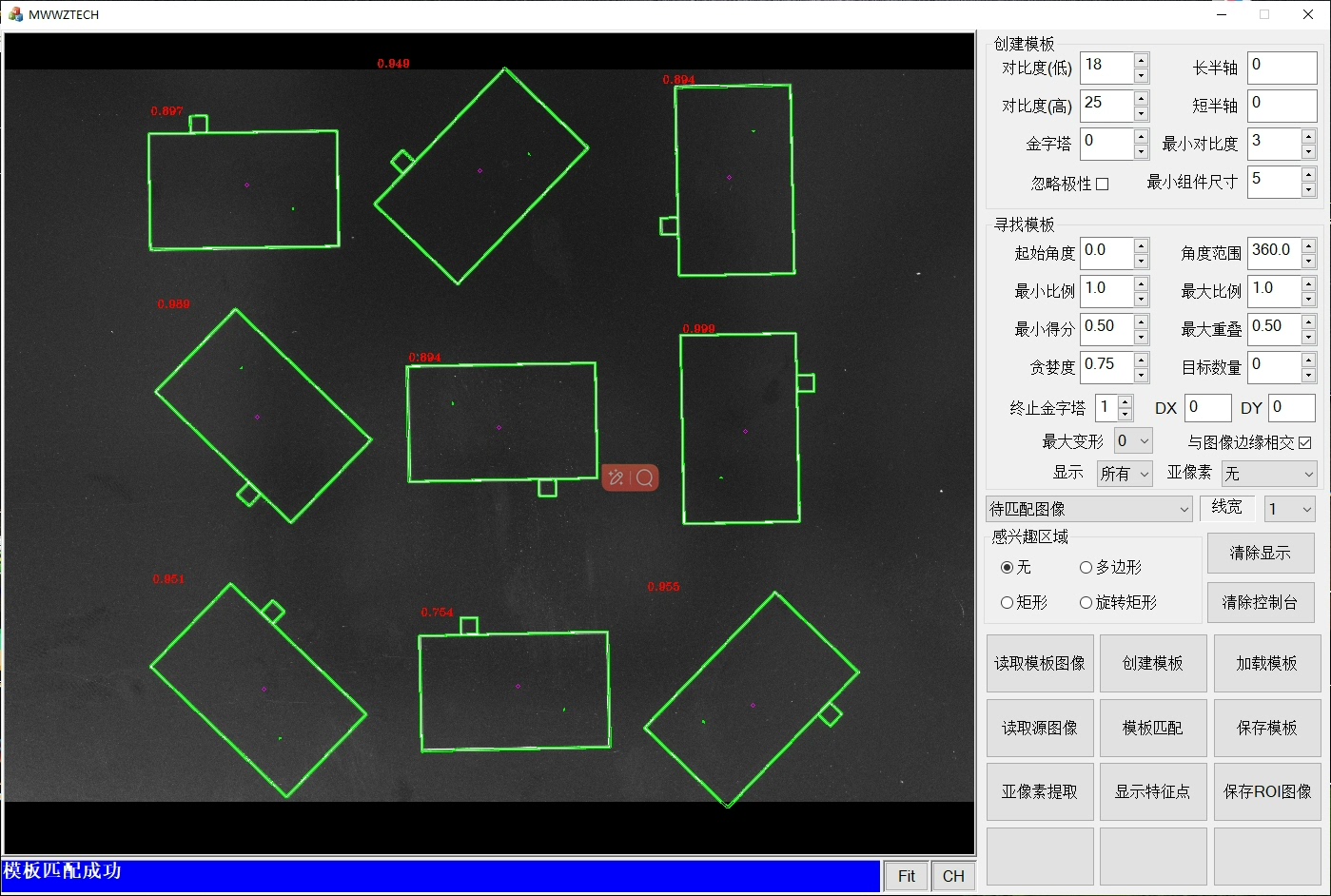
});透视匹配这块建议分两步走:先用SIFT等特征点做粗匹配,再用RANSAC优化单应矩阵。有个骚操作是把单应矩阵分解成旋转平移参数,再用这些参数初始化模板匹配的搜索范围,效率能提升三倍不止。
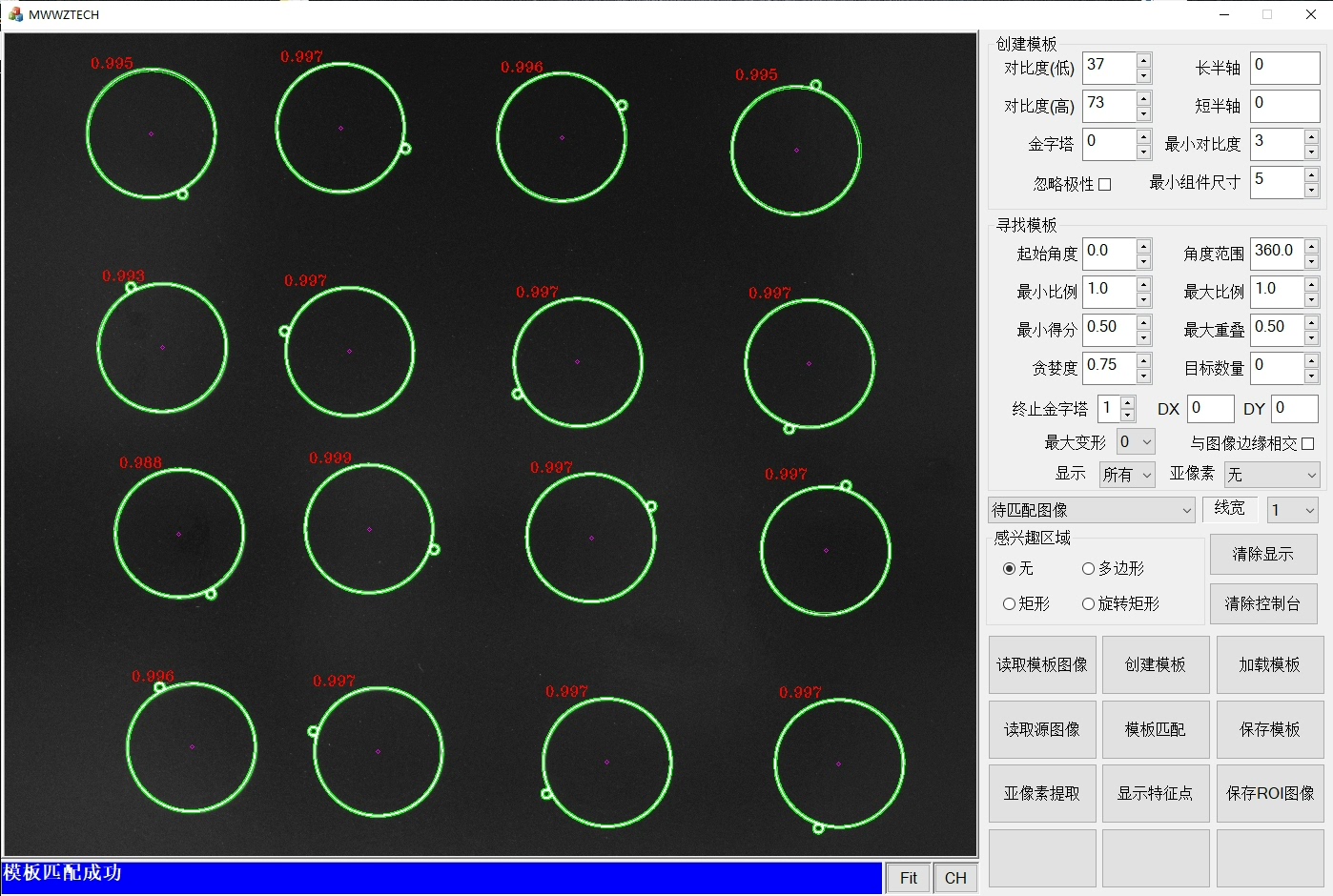
自研模板匹配,多模板匹配,变形、透视匹配,形状匹配,C++/C#,openCV
形状匹配的核心在于轮廓处理。个人喜欢用傅里叶描述子代替Hu矩,对噪声更鲁棒。提取轮廓后记得做平滑处理,否则边缘毛刺分分钟教你做人:
vector<Point> simplifyContour(vector<Point>& contour) {
vector<Point> approx;
double epsilon = 0.005 * arcLength(contour, true);
approxPolyDP(contour, approx, epsilon, true);
return approx;
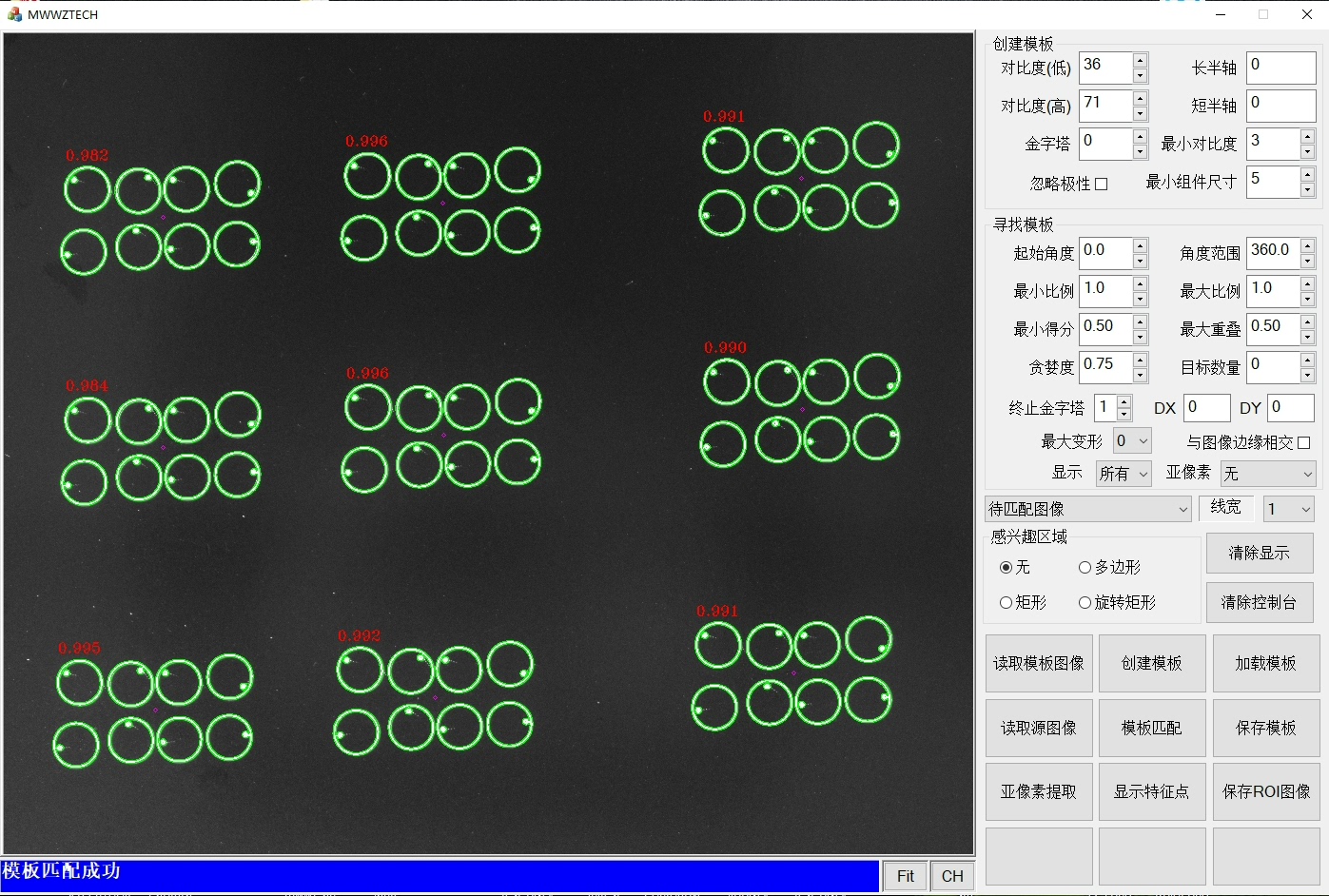
}最后说个性能优化技巧:把二值化操作提前到特征计算之前。某次优化把耗时从400ms降到了90ms,具体操作是用积分图加速区域判断。当然,这种hack得配合具体场景,别无脑上。
实际开发中最麻烦的是平衡精度和速度。建议做个动态调整机制——首帧用高精度匹配,后续帧用预测区域+低精度快速校验。毕竟,工业场景里稳定比偶尔的高精度更重要。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 13
13 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)