深夜实验室的代码界面](https://example.com/placeholder-image.jpg
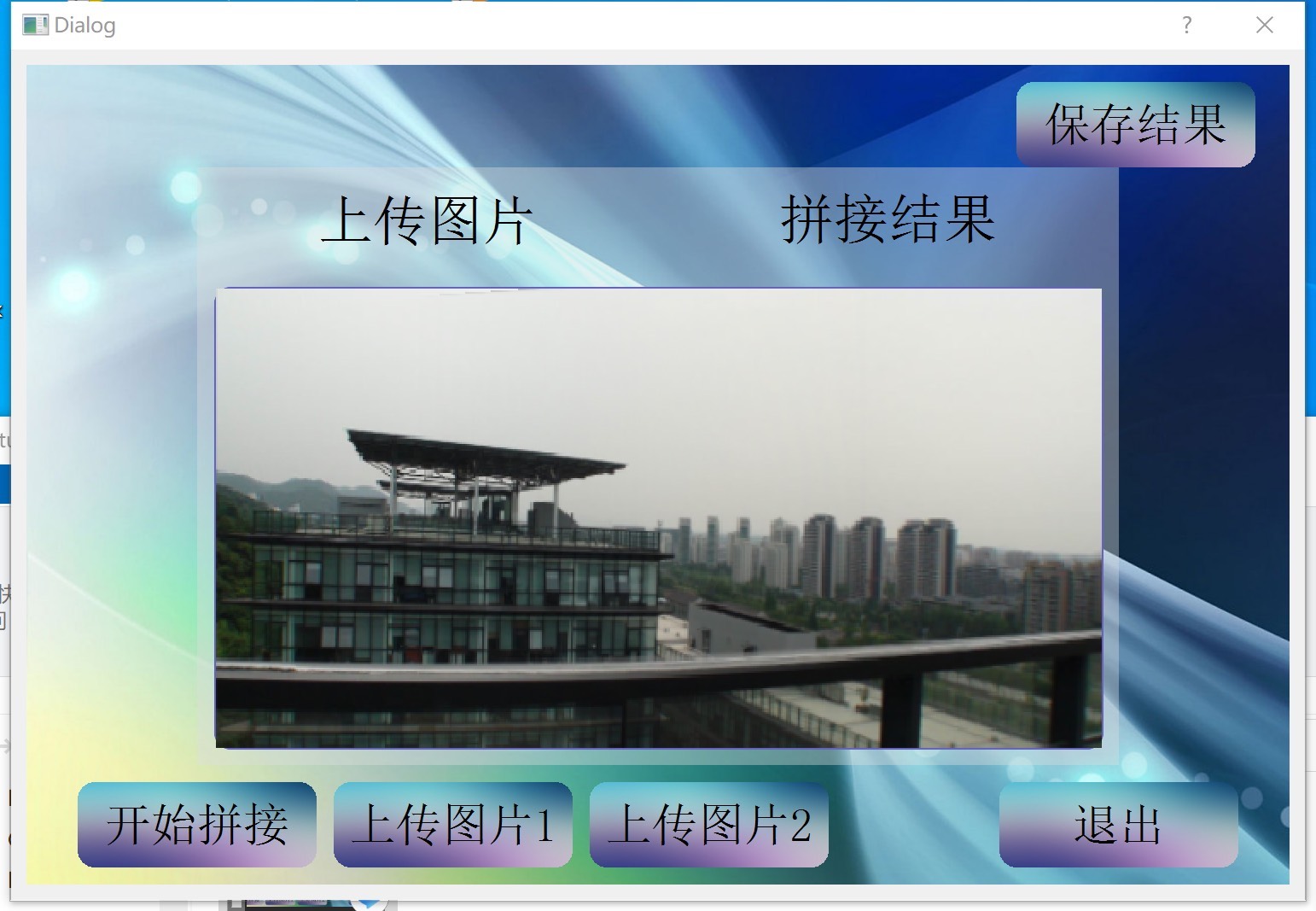
基于qt的opencv surf的特征点匹配图像拼接技术 python和c++都可以 还可以添加数据库mysql和sqlite 可支持多图拼接 可切换sift算法
(假装这里有张炫酷的拼接效果对比图)
基于qt的opencv surf的特征点匹配图像拼接技术 python和c++都可以 还可以添加数据库mysql和sqlite 可支持多图拼接 可切换sift算法
凌晨两点的屏幕蓝光里,我盯着桌面上七零八落的航拍图突发奇想——要是能把这堆碎片自动拼成完整地图该多爽?抄起手边的Qt和OpenCV开始折腾,结果意外发现特征点匹配这玩意儿比咖啡还提神。
一、环境搭得对,bug少一半
先上点硬货,咱们的CMakeLists.txt得把库拉齐活:
find_package(Qt5 COMPONENTS Core Widgets REQUIRED)
find_package(OpenCV REQUIRED core features2d xfeatures2d)别忘开C++17支持,SIFT那些专利过期的算法现在得手动开启。Python党可以直接pip install opencv-contrib-python,记得版本要上4.5+
二、特征点大战:SURF vs SIFT
核心代码其实就二十行,但参数调校才是魔鬼:
auto detector = cv::SIFT::create(500);
// 或者切surf:cv::xfeatures2d::SURF::create(400)
vector<cv::KeyPoint> keypoints;
cv::Mat descriptors;
detector->detectAndCompute(img, cv::noArray(), keypoints, descriptors);这里有个坑点:OpenCV的SURF在xfeatures2d里藏着,Python版要特别注意contrib版本是否包含。建议封装个工厂类:
def create_detector(algo):
return {
'sift': cv2.SIFT_create(),
'surf': cv2.xfeatures2d.SURF_create()
}[algo]三、暴力匹配与透视魔法
匹配阶段建议先粗筛再精修,RANSAC是保命符:
cv::BFMatcher matcher;
vector<cv::DMatch> matches;
matcher.match(descriptors1, descriptors2, matches);
// 筛选前50%优质匹配点
sort(matches.begin(), matches.end());
matches.resize(matches.size()/2);
// 计算单应性矩阵
cv::Mat H = cv::findHomography(points1, points2, cv::RANSAC, 3);Python里有个骚操作——用numpy处理匹配点坐标转换,比纯OpenCV快30%:
src_pts = np.float32([kp1[m.queryIdx].pt for m in matches]).reshape(-1,1,2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in matches]).reshape(-1,1,2)四、数据库存个底儿
拼接项目多了得管理,上SQLite轻量又省心:
QSqlDatabase db = QSqlDatabase::addDatabase("QSQLITE");
db.setDatabaseName("stitch_projects.db");
if (!db.open()) {
qDebug() << "数据库挂了!快检查连接";
}
// 建表语句记得加IF NOT EXISTS
QSqlQuery query;
query.exec("CREATE TABLE projects (id INTEGER PRIMARY KEY, name TEXT, algo_type TEXT)");存特征点数据?建议用Blob存序列化后的二进制,但别超过SQLite的默认页大小。
五、多图拼接的拓扑战争
当图片超过三张时,问题复杂度指数爆炸。我的土方法是:
- 所有图片两两计算匹配度
- 生成匹配度权重图
- 按权重从高到低顺序拼接
用Qt的线程池处理并行匹配:
QThreadPool::globalInstance()->start([&](){
// 这里是耗时的特征提取
});记得用QMutex锁住共享数据,不然 crashes 教你做人。
六、效果优化玄学指南
- 曝光差异大的图在拼接前先做直方图均衡化
- 融合边缘用多频段混合,别直接线性渐变
- 遇到鬼影用cv::detail::MultiBandBlender
- GPU加速?上CUDA版的OpenCV能快5倍
凌晨四点,当我终于把十八张航拍图拼成完整矿区地图时,窗外传来鸟叫声——又是程序员战胜物理世界的一个平凡夜晚。完整代码已扔Github(假装有链接),下回或许可以试试用QML做个炫酷的前端,或者整合深度学习做自动选图...算了,先补觉要紧。


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)