Nature electronics:利用热收缩技术制造共形电子器件
天津大学与清华大学联合团队开发了一种基于热收缩技术的共形电子器件制造方法。该方法采用半液态金属Cu-EGaIn在热塑性薄膜上形成电路,通过加热使薄膜收缩贴合目标物体。研发的金属材料能承受收缩变形并保持电稳定性,仿真工具可精确预测电路变形。所得器件具有优异耐久性,5000次弯曲后电导率变化极小。该方法适用于各种复杂表面,成功应用于飞机除冰、触觉传感器、脉搏监测等场景,为人机界面和智能穿戴设备提供了新
共形电子器件在可穿戴设备和生物集成设备的开发中具有重要应用价值。然而,现有的共形电子器件制造方法存在机械强度不足、材料适用范围有限或需要专用设备和复杂工艺等问题。天津大学国瑞研究员(中科院理化所)、黄显教授联合清华大学汪鸿章特别研究员团队报道了一种利用热收缩技术制造共形电子器件的方法。
该方法首先在热塑性基底上形成半液态金属电路图案,然后加热使其围绕目标物体收缩。开发了一种能够承受收缩变形并保持长期电稳定性的半液态金属。此外,还开发了仿真工具,用于模拟热塑性薄膜的变形对最终电路图案的影响,从而能够在初始平面薄膜上实现精确的电路设计。最终得到的自适应形状电子器件具有极高的耐久性,在经过5000次弯曲和扭转循环后,其电导率变化极小。通过构建用于模型飞机除冰、机器人触觉传感器、水果温湿度传感器、指尖脉搏传感器和智能绷带的电路,展示了该方法的应用潜力。
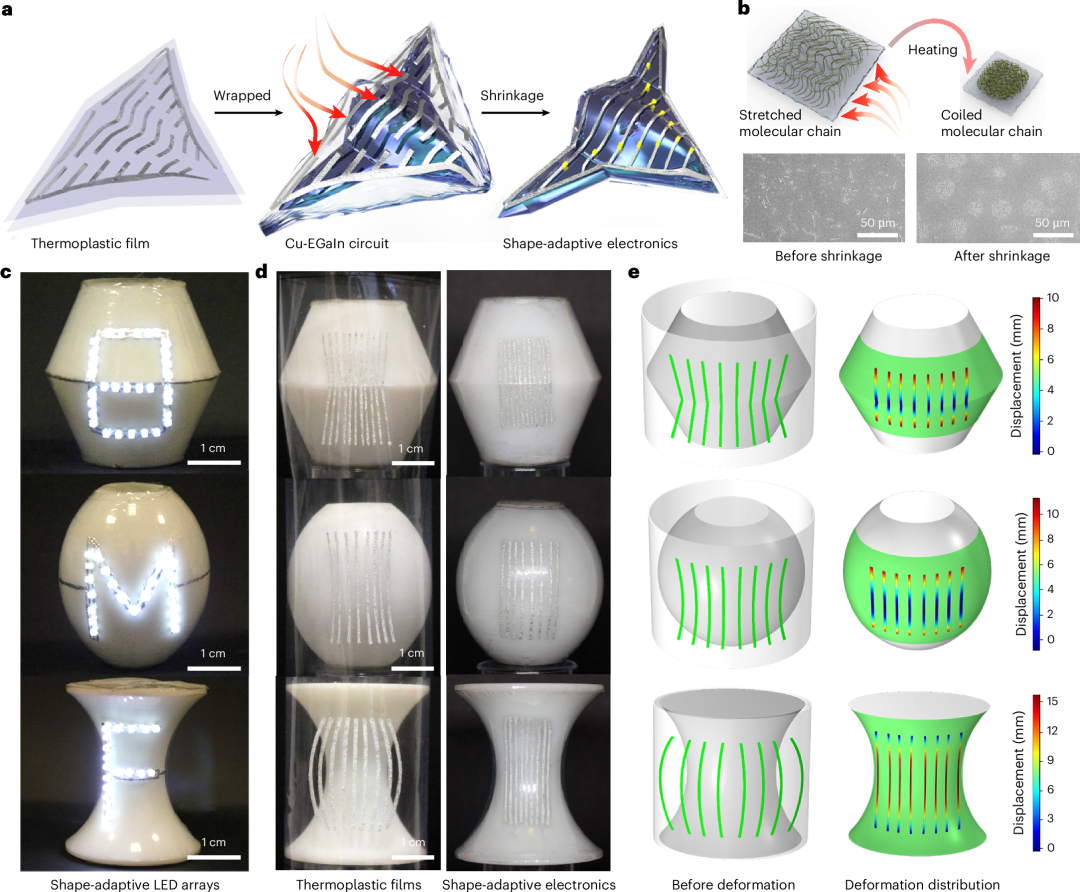
图 1:形状自适应电子器件的概念和设计。
a ,热收缩方法示意图。b , 热塑性薄膜收缩原理示意图及收缩前后热塑性薄膜表面形貌示意图 。c ,LED 阵列在三种不同表面上的图像。d,在三种不同表面上制备的形状自适应电子器件在收缩前后的图像 。e , 在三种不同表面上制备的形状自适应电子器件在收缩前后的仿真结果。
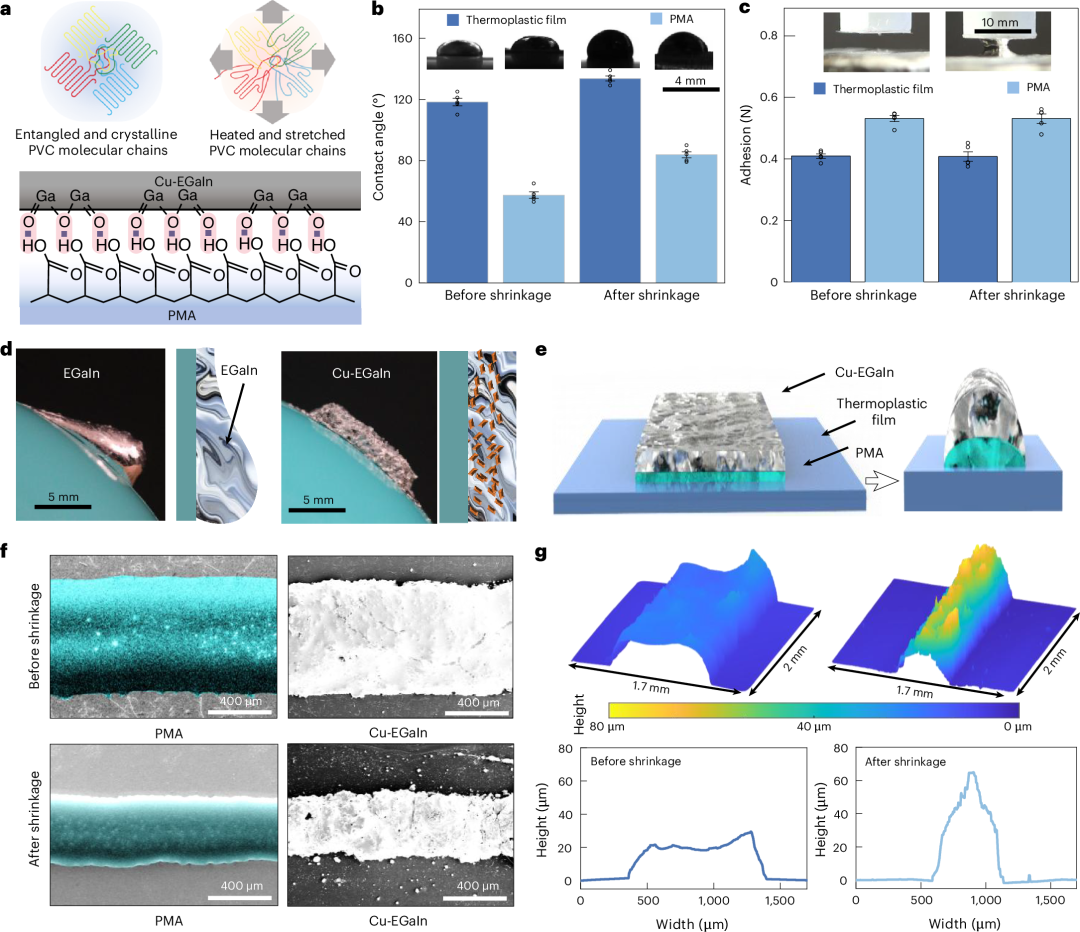
图 2:Cu-EGaIn 导线与热塑性薄膜的粘附特性及横截面轮廓。
a ,热塑性薄膜中分子链变形示意图及 Cu-EGaIn 粘附于 PMA 的原理。PVC,聚氯乙烯 。b ,EGaIn 在热塑性薄膜和 PMA 上收缩前后的接触角。c , EGaIn 在热塑性薄膜和 PMA 上收缩前后的粘附力。d , EGaIn 和 Cu-EGaIn 在曲面上的图像和示意图 。e , Cu-EGaIn 图案热塑性薄膜在收缩前后的横截面形貌示意图。f,PMA 和 Cu-EGaIn 线在热塑性薄膜上收缩前后的 SEM 图像 。g ,Cu-EGaIn 线在热塑性薄膜上收缩前后的图像和横截面轮廓。b 和 c 中的数据以平均值±标准差 (n =5 个样本)表示。
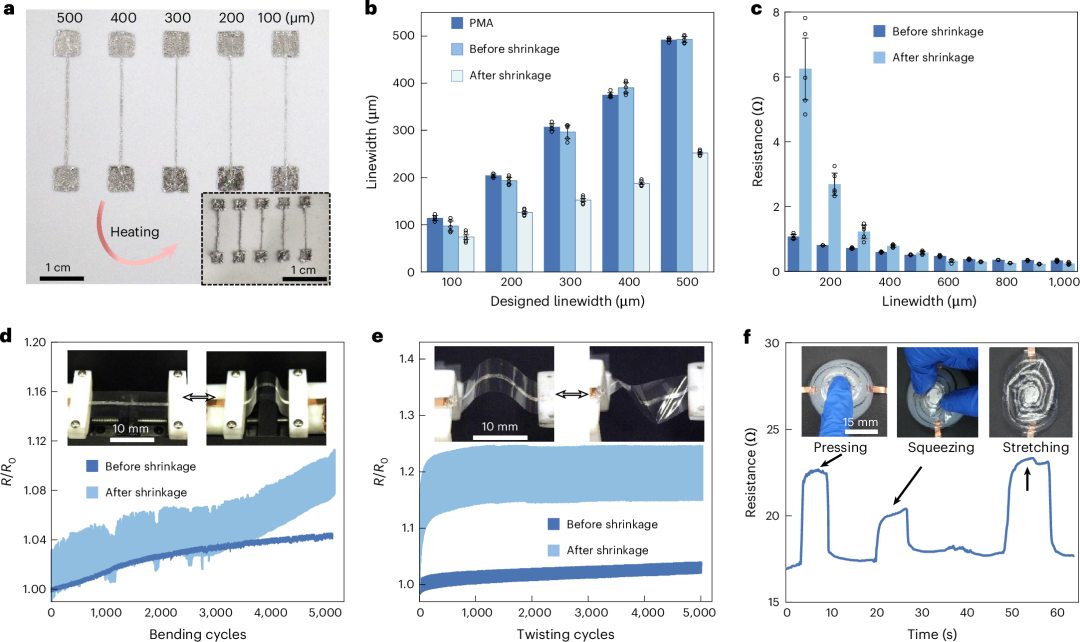
图 3:形状自适应电子器件在不同条件下的电性能。
a ,热塑性薄膜上不同宽度 Cu-EGaIn 导线收缩前后的图像。b , 热塑性薄膜上不同宽度 PMA 和 Cu-EGaIn 导线收缩前后的宽度。c , 热塑性薄膜上不同宽度 Cu-EGaIn 导线收缩前后的电阻。d , 形状自适应电子器件在收缩前后经受 5000 次弯曲循环后的图像和电阻变化 。e ,形状自适应电子器件在收缩前后经受 5000 次扭转循环后的图像和电阻变化。f , 形状自适应电子器件经受挤压、卷曲和拉伸后的图像和电阻变化 。b 和 c 中的数据以平均值±标准差 (n =5 个样本)表示。
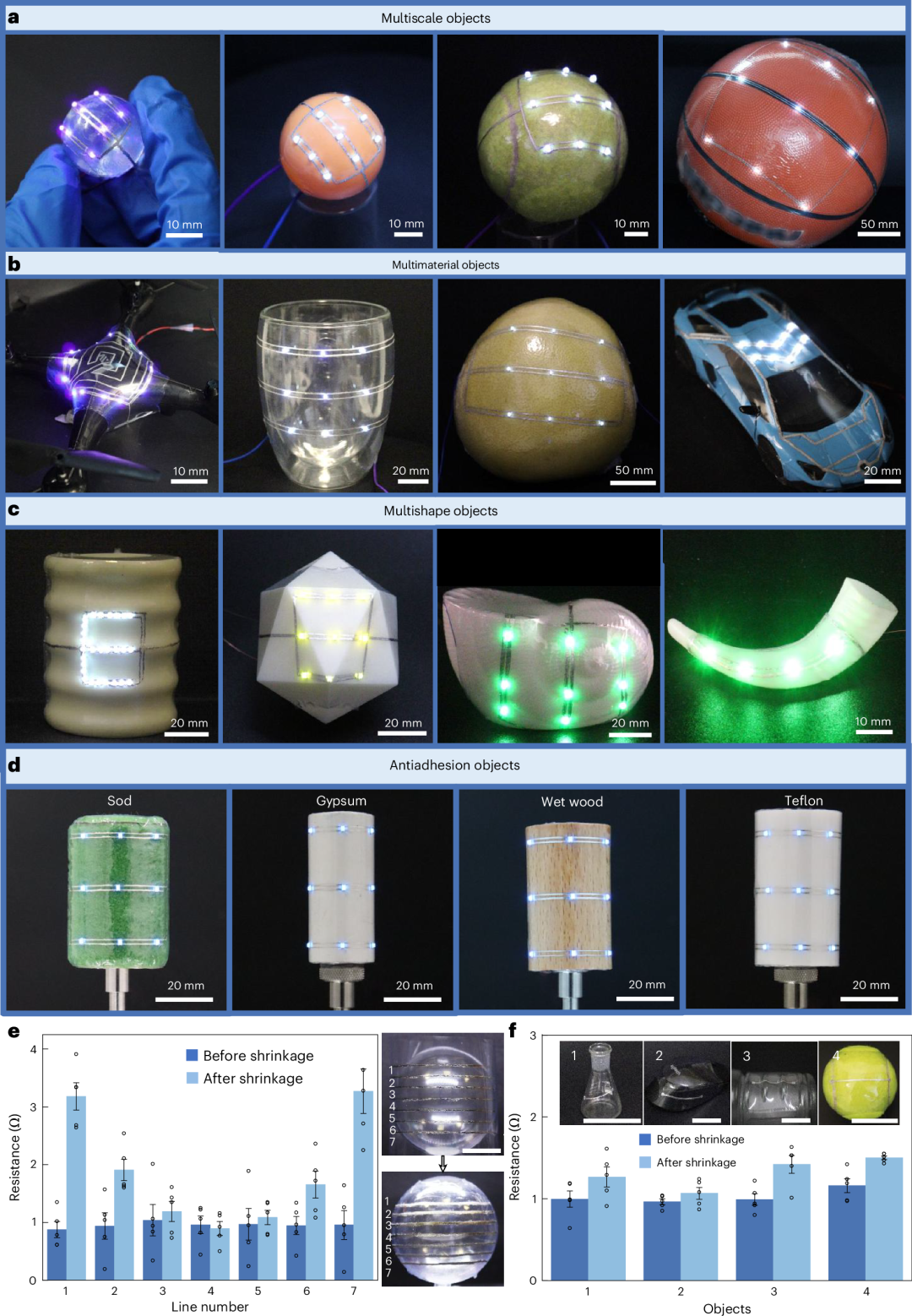
图 4:热缩法的普适性演示。
a ,在不同尺寸物体上制作的共形 LED 阵列图像。b , 在不同材料物体上制作的共形 LED 阵列图像 。c ,在不同复杂表面物体上制作的共形 LED 阵列图像 。d ,在各种防粘附物体上制作的共形 LED 阵列图像。e , 球体上的形状自适应电子器件图像,以及收缩前后球体不同位置 Cu-EGaIn 导线的电阻变化。f , 不同表面上的形状自适应电子器件图像及其收缩前后的电阻。比例尺:40 mm。图 e 和 f 中的数据以平均值±标准差 (n =5 个样本)表示。
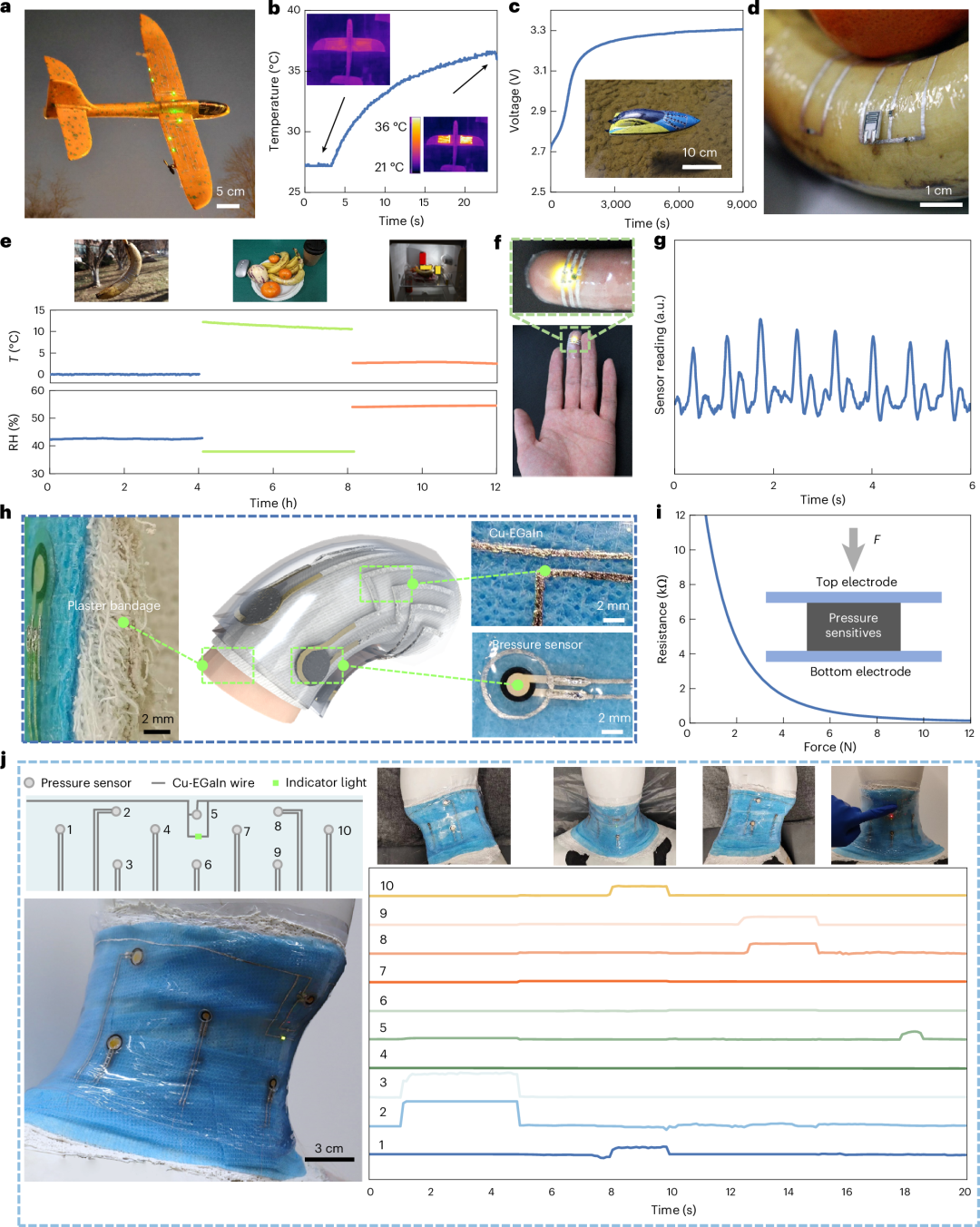
图 5:多种形状自适应电子器件的演示。
a ,模型飞机表面的 LED 阵列和加热电路图像。b , 模型飞机加热电路工作前后红外图像和温度上升曲线。c , 模型船表面的太阳能电池阵列及其电池充电电压曲线 。d ,应用于香蕉表面的形状自适应电子器件图像。e,配备形状自适应电子器件的香蕉的图像以及记录的温度和相对湿度(RH)读数 。f ,指尖形可穿戴脉搏波传感器图像 。g , 指尖形可穿戴脉搏波传感器采集的数据 。h ,智能绷带结构示意图以及智能绷带横截面、Cu-EGaIn 电路和压力传感器的图像。i , 压力传感器的力-电阻曲线及其结构示意图。j , 安装在颈部的智能绷带图像以及绷带在不同条件下采集的压力信号。
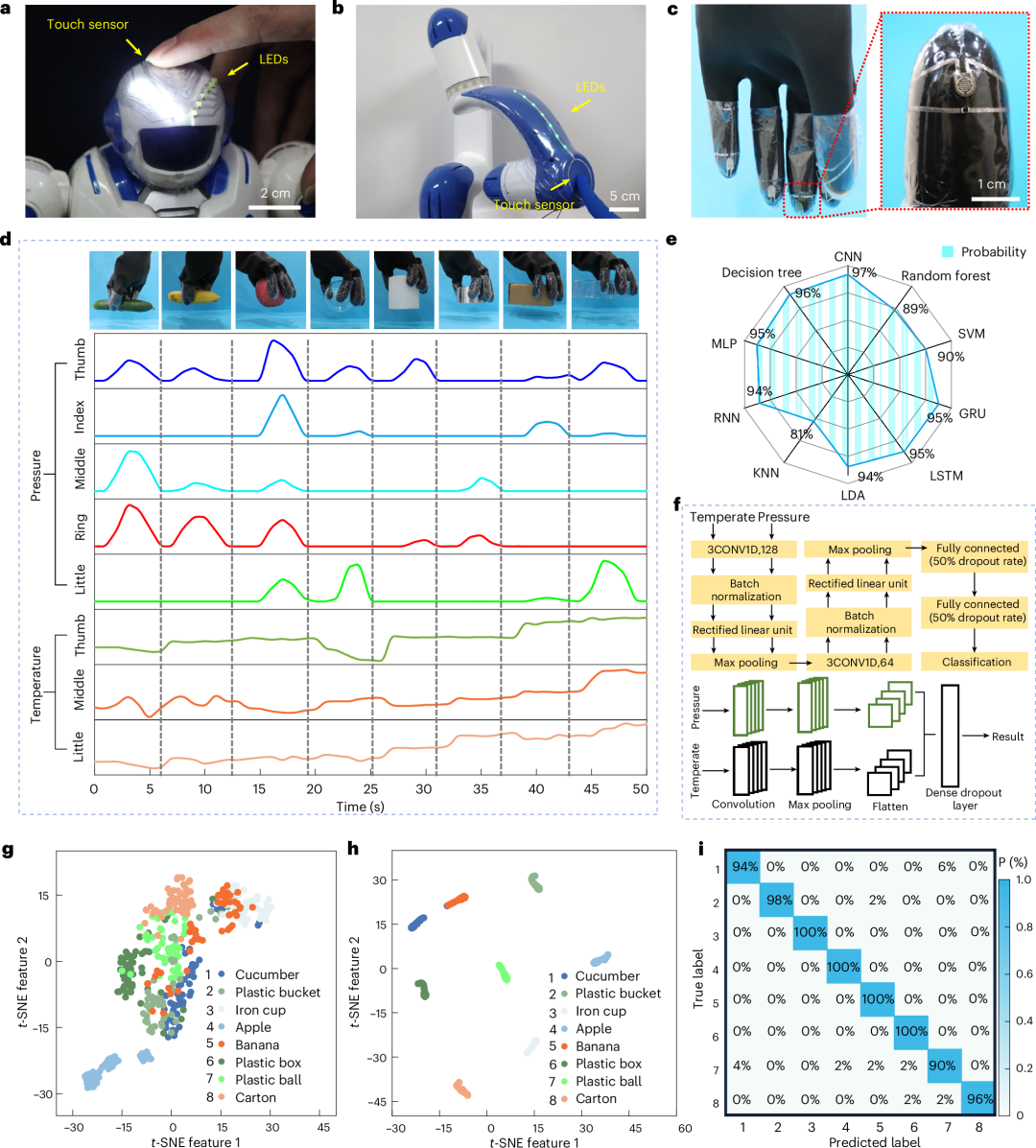
图 6:用于人机界面的形状自适应电子器件演示。
a ,机器人头部共形 LED 阵列及其控制传感器阵列的图像。b , 机械臂上共形 LED 阵列及其控制传感器的图像 。c ,能够通过形状自适应电子器件感知压力和温度的智能手套的图像 。d ,智能手套抓取物体的图像,以及采集到的压力和温度信号。e , 十种不同机器学习算法的准确率比较。SVM,支持向量机;GRU,门控循环单元;LSTM,长短期记忆网络;LDA,线性判别分析;KNN, k 近邻;RNN,循环神经网络;MLP,多层感知器。f , 我们 CNN 模型的结构构建。g , 抓取八个物体原始数据的 t -SNE 可视化结果 。h ,机器学习后抓取八个物体数据的 t -SNE 可视化结果。i , 我们模型的纹理识别混淆矩阵。
参考文献:Jiang, C., Li, W., Wu, Q. et al. Shape-adaptive electronics based on liquid metal circuits printed on thermoplastic films. Nat Electron (2026). https://doi.org/10.1038/s41928-025-01528-6

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)