合作动态|OpenLoong 携手国讯芯微,共破人形机器人实时性技术瓶颈
2025年被视为人形机器人产业化元年,实时性控制成为规模化落地的关键瓶颈。OpenLoong开源社区与国讯芯微合作,通过硬实时操作系统和开源控制框架,将控制抖动降至微秒级,实现亚毫米级运动精度。双方技术融合解决了多设备协同、边缘计算等难题,在电子制造等场景验证中显著提升效率、降低成本。开源生态持续扩展,推动人形机器人技术从实验室走向产业化应用,降低行业准入门槛。
产业破局:实时性瓶颈正在成为人形机器人规模化落地的关键变量
2025年被业界普遍视为人形机器人产业化元年。在这一阶段,行业正加速从实验室原型验证,迈向面向真实场景的规模化应用与量产探索。国际机器人联合会(IFR)在《Humanoid Robots: “Vision and Reality”》报告中指出,多模态感知同步、高精度运动控制与复杂环境适配能力,是当前人形机器人产业落地面临的核心挑战。
在现有技术路径下,大量人形机器人系统仍基于具备软实时特性的通用架构构建,在算法创新与生态扩展方面具备优势,但在高速运动、多关节协同及复杂工业环境中,指令延迟与抖动问题逐渐显现,制约了其系统性能向工程化、量产化阶段迈进。在这一产业背景,OpenLoong 开源社区作为长期专注于人形机器人全栈开源的技术平台,持续以开源控制体系为核心,向生态伙伴提供稳定、可扩展的开源技术底座,引导多方力量协同探索高精人形机器人产业化的可行路径。

生态合作伙伴国讯芯微:硬实时领域的自主化技术标杆
国讯芯微(苏州)科技有限公司成立于2017年10月,是一家长期专注于工业智能制造与具身智能核心控制技术,聚焦在具身智能操作系统及其基座产品的技术研发、生产、销售为一体的高科技企业,致力于为智能制造输出自主化可控核心技术产品。在技术层面,国讯芯微深耕工业控制领域多年,其自主研发的 NECRO·白泽具身智能操作系统,早已攻克硬实时控制领域的“卡脖子”技术,并获得工信部100% 自主代码认证。基于其在多类具身计算平台上的适配基础,相关技术能力将支撑 OpenLoong 控制框架在相应具身平台上实现多载体适配。
OpenLoong 开源社区为生态伙伴与开发者提供统一的全栈开源技术底座
围绕实时性、控制链协同与开源架构等核心能力,OpenLoong 开源社区持续推进技术体系建设,支撑高精人形机器人走向产业化应用。
高确定性实时控制能力
OpenLoong 控制框架通过与EtherCAT协议的深度适配与融合,将原有的百微秒级的抗压抖动降低到了微秒级,满足高速、高精度人形机器人控制需求。
完整的控制链路协同能力
在 OpenLoong 开源控制框架下,通过与生态伙伴国讯芯微在通信等关键能力上的协同匹配,平台进一步完善了“感知—决策—执行”的全链路协同机制,支持机器人在强电磁干扰、宽温波动等场景下仍保持亚毫米级运动精度。
核心控制框架支撑能力
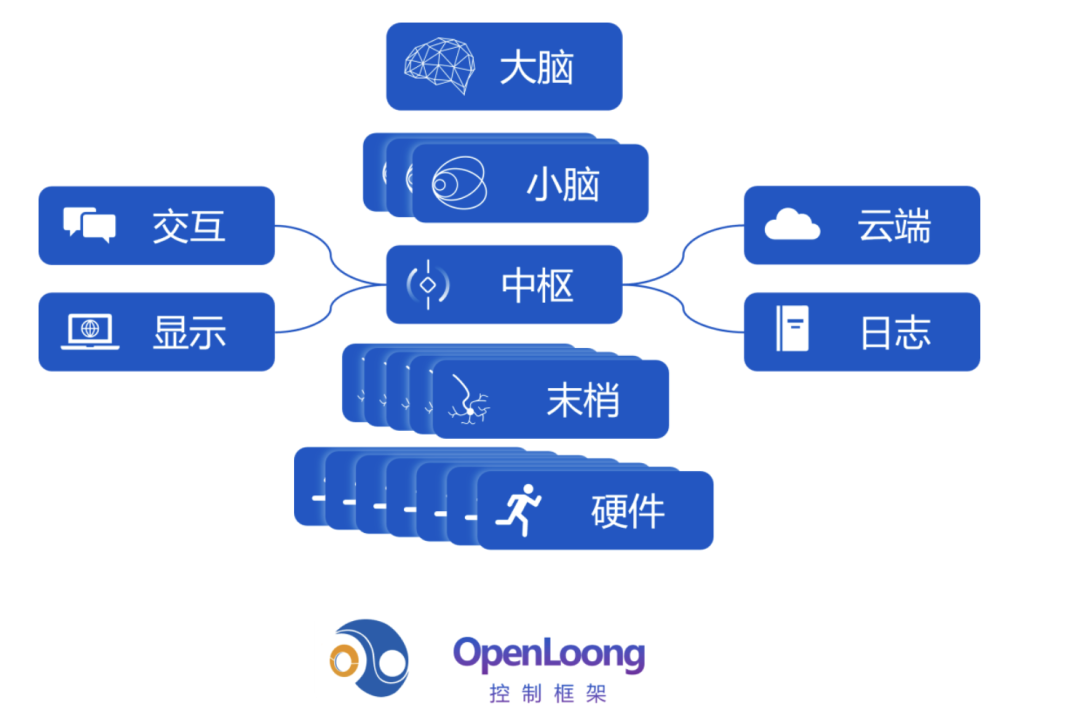
作为 OpenLoong 操作系统的核心组成部分,OpenLoong 控制框架提供覆盖运动控制、感知处理、任务调度等模块的具备完整功能的机器人控制程序库,为人形机器人从基础控制到复杂任务执行提供统一、稳定的技术支撑。
目前,OpenLoong 控制框架已面向社区以开源形式持续迭代与维护,欢迎开发者、研究者与产业伙伴通过 GitHub 仓库获取源码、参与使用与共建。我们也诚挚邀请大家在实际开发与应用过程中,积极提交问题反馈、功能建议与优化思路,共同完善控制框架,推动 OpenLoong 开源生态持续演进。
作为 OpenLoong 开源社区的生态合作伙伴之一,国讯芯微在多主站同步、矩阵加速与多模态协同等方面的技术积累,与 OpenLoong 开源控制框架在技术目标和实现路径上实现了相互匹配。
NIIC EtherCAT Master同步多主站
自主研发的、集成于控制器中的原生多主站技术,可支持3-5路EtherCAT主站独立运行且实现纳秒级同步,无需外置耦合器即可直驱多设备,以125μs超短控制周期解决传统单主站数据拥堵、协同精度不足及成本高问题,适配人形机器人全身协同与复杂产线控制场景。
星速NMA矩阵加速器
针对Arm平台算力瓶颈研发的底层加速方案,通过汇编级指令优化与自研算法实现最高300倍矩阵运算性能提升,深度适配NVIDIA Jetson平台,可高效支撑人形机器人运动学求解、AI大模型边缘计算及视觉轨迹规划等任务,破解嵌入式场景复杂算力需求难题。
多模态同步管理器 NIIC SYNC MANAGER
具身智能控制器的核心协同模块,可将高清相机、深度相机、固态激光雷达、IMU、力矩传感器等同步触发与控制,并包含低延时的精准时间戳及数据码流,实现机器人“大小脑协同",即边缘端实时控制(小脑)与 AI 决策(大脑)的无缝衔接。

场景验证:合作方案的应用探索
在多个实际应用场景中,本次合作围绕人形机器人在工程化应用中的关键需求,开展了针对性的场景验证与探索。
在电子制造产线场景中,联合方案可通过 125μs 级数据传输周期,实现多路GMSL摄像头与力矩传感器的同步数据采集,产线机器人调试周期大幅缩短,综合运营成本降低约 30%,并可满足 0.01mm 级精密装配要求。
在极端环境场景下,系统可在 -40℃ 至 60℃ 的宽温范围内稳定运行,处理数十 GB 级点云数据,支撑复杂检测作业,在保障同等检测精度的同时显著降低设备采购成本。
在精细操作场景中,通过仿真平台预演与实机控制的联动机制,机器人分拣效率较传统方案显著提升。
同时,随着相关能力逐步向社区开发者开放,高精控制技术的应用门槛有望进一步降低,在康复医疗等垂直领域展现出持续拓展的应用空间,体现了开源生态与行业场景结合的实践潜力。

在本次合作中,OpenLoong 开源社区作为全栈人形机器人开源技术平台,为生态伙伴国讯芯微提供了统一、开放且可工程化落地的技术底座。依托其成熟的开源控制体系、仿真与实机协同机制以及跨平台适配能力,OpenLoong 开源社区为生态伙伴提供了标准化接入与验证环境,使相关技术能够在统一架构下完成集成、调试与场景验证,降低系统对接与工程化落地成本,并推动技术能力向多场景、多载体的规模化应用转化。
开源生态持续扩展,携手共推人形机器人产业发展
人形机器人产业的规模化落地,并非依赖单一技术或单一主体,而是建立在开源底座之上的持续协同与共同演进过程。围绕这一目标,OpenLoong 开源社区坚持以开源为核心路径,通过构建统一、开放、可扩展的全栈技术体系,为生态伙伴提供协同创新与工程化验证的基础环境。
本次与生态伙伴的协作实践进一步验证了,开源平台与产业技术能力的深度协同,能够加速关键技术从研发走向应用,降低系统集成与场景落地成本,推动技术能力在更多行业场景中实现复用与扩展。随着更多实时控制、计算、感知与应用层能力持续汇入开源体系, OpenLoong 开源社区的技术生态也将不断演进,逐步形成更加开放、多元、可持续的创新网络。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)