“YOLO26-obb+语音控制” 机械臂抓取方案(一、自动化采集数据脚本)
·
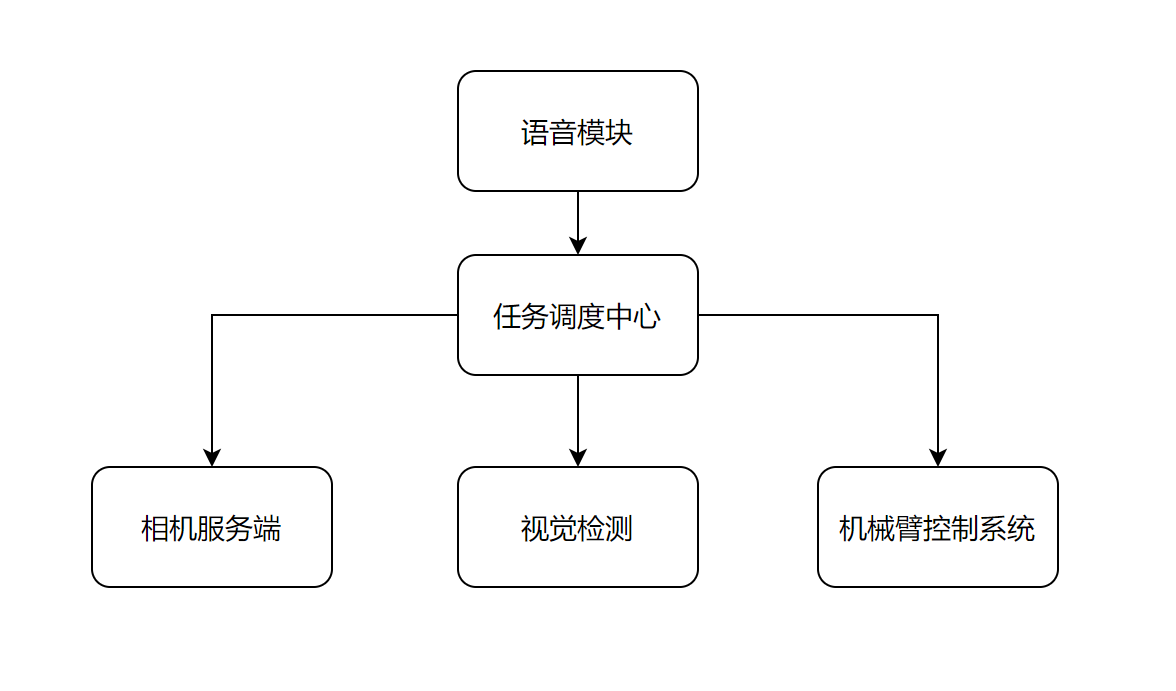
我们今天开始进行简易的Yolo26-obb+语音控制的机械臂抓取方案,首先确定以下我们的思路。
1、我们采用的模型为Yolo26-obb(后续会再做模型的选择,如DINO)
2、沿用之前的相机服务端框架
3、沿用之前的机械臂控制系统
4、做一个任务调度中心,将服务端与机械臂控制集成管控
5、语音模块,目前先采用离线Vosk的方式来进行(后面会一步步优化!!)
以下为简略架构图:
模型训练
当使用到yolo时,我们避免不了要去接触模型训练的步骤,其实我们做基础的模型训练是一件很简单的事情,我们做一件事情的时候一定要想好大概的框架,再去做增删改查,大家一起跟着我的思路来看看吧。
数据采集
模型训练的前提就在于需要有相应的数据来作支撑,如果你连数据都没有,模型是不可能训练出来的,那么我们这里做一下基础和进阶的两种方式。
采集方案一
方案一我们使用机械臂处于固定拍照姿态,相机保持不动,仅移动物体的摆放位置及姿态,通过命令行按键的方式触发拍照。
优点:由于桌面级任务,采集时的图像与实际任务时拍摄的图像重合度高,训练出来的模型识别率高,更有效更直观。
缺点:模型存在过拟合的问题,由于一直在同一画面内拍摄的图像,当物体处于其他背景下时,识别的结果会降低。同时如果有采集数据量的要求,此等方案耗时较大。
collect_images_normal.py
import pyrealsense2 as rs
import numpy as np
import cv2
import os
# =========================
# 保存路径
# =========================
IMG_DIR = "dataset/images/train"
DEPTH_DIR = "dataset/depth/train"
os.makedirs(IMG_DIR, exist_ok=True)
os.makedirs(DEPTH_DIR, exist_ok=True)
# 自动编号
img_id = len(os.listdir(IMG_DIR))
# =========================
# RealSense 初始化
# =========================
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
pipeline.start(config)
# 对齐
align = rs.align(rs.stream.color)
print("相机已启动")
print("按 [Space] 保存 | 按 [q] 退出")
try:
while True:
frames = pipeline.wait_for_frames()
aligned_frames = align.process(frames)
color_frame = aligned_frames.get_color_frame()
depth_frame = aligned_frames.get_depth_frame()
if not color_frame:
continue
color_image = np.asanyarray(color_frame.get_data())
depth_image = np.asanyarray(depth_frame.get_data())
# 深度可视化
depth_vis = cv2.applyColorMap(
cv2.convertScaleAbs(depth_image, alpha=0.03),
cv2.COLORMAP_JET
)
# 拼接显示
display = np.hstack((color_image, depth_vis))
cv2.imshow("RGB | Depth", display)
key = cv2.waitKey(1) & 0xFF
# =========================
# 保存(空格键)
# =========================
if key == 32: # Space
name = f"{img_id:06d}"
cv2.imwrite(f"{IMG_DIR}/{name}.jpg", color_image)
cv2.imwrite(f"{DEPTH_DIR}/{name}.png", depth_image)
print(f"保存 {name}")
img_id += 1
# =========================
# 退出
# =========================
if key == ord('q'):
break
finally:
pipeline.stop()
cv2.destroyAllWindows()
print("相机关闭")
采集方案二
由于我们的抓取方案不变,依旧是眼在手上的方案,所以我们采集方案二中使用机械臂点位运动来拍摄图像,针对不同拍摄角度来采集数据。
前提条件:我们提前需要自定义8-12个拍照点位,1个初始点位
collect_images_auto.py
import os
import cv2
import time
import random
import logging
import lebai_sdk
import numpy as np
import pyrealsense2 as rs
lebai_sdk.init()
logger = logging.getLogger(__name__)
# todo 机械臂相关配置
ROBOT_IP = '192.168.55.100'
mode = False
acc_speed = 5
v_speed = 0.5
move_t = 0
move_r = 0
# todo 自定义10个拍照点位,PHOTO_POS1作为初始点
PHOTO_POS1 = {"x": 0.121, "y": -0.186, "z": 0.533, "rx": 0, "ry": 0.0, "rz": 0}
PHOTO_POS2 = {"x": 0.121, "y": -0.100, "z": 0.533, "rx": 0, "ry": 0.0, "rz": 10}
PHOTO_POS3 = {"x": 0.121, "y": 0.000, "z": 0.533, "rx": 0, "ry": 0.0, "rz": -10}
PHOTO_POS4 = {"x": 0.200, "y": -0.186, "z": 0.533, "rx": 0, "ry": 0.0, "rz": 20}
PHOTO_POS5 = {"x": 0.200, "y": -0.100, "z": 0.533, "rx": 0, "ry": 0.0, "rz": -20}
PHOTO_POS6 = {"x": 0.200, "y": 0.000, "z": 0.533, "rx": 0, "ry": 0.0, "rz": 30}
PHOTO_POS7 = {"x": 0.280, "y": -0.186, "z": 0.533, "rx": 0, "ry": 0.0, "rz": -30}
PHOTO_POS8 = {"x": 0.280, "y": -0.100, "z": 0.533, "rx": 0, "ry": 0.0, "rz": 15}
PHOTO_POS9 = {"x": 0.280, "y": 0.000, "z": 0.533, "rx": 0, "ry": 0.0, "rz": -15}
PHOTO_POS10 = {"x": 0.160, "y": -0.050, "z": 0.500, "rx": 0, "ry": 0.0, "rz": 0}
IMG_DIR = "../dataset/images/train"
DEPTH_DIR = "../dataset/depth/train"
os.makedirs(IMG_DIR, exist_ok=True)
os.makedirs(DEPTH_DIR, exist_ok=True)
img_id = len(os.listdir(IMG_DIR))
# =========================
# RealSense 初始化
# =========================
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
pipeline.start(config)
align = rs.align(rs.stream.color)
print("相机启动成功")
# todo 乐白机械臂连接
def connect_robot(ip):
global robot, is_connected
try:
robot = lebai_sdk.connect(ip, mode)
robot.start_sys()
is_connected = True
print("机械臂连接成功")
logger.info("机械臂连接成功,并以启动")
return True
except Exception as e:
print(f"连接失败: {e}")
logger.info(f"连接失败: {e}")
is_connected = False
return False
def disconnect_robot():
global robot, is_connected
if robot and is_connected:
try:
robot.stop_sys()
except Exception as e:
print(f"停止系统出错: {e}")
logger.info(f"停止系统出错: {e}")
is_connected = False
print("已断开连接")
logger.info("已断开连接")
# todo 初始化时就连接机械臂
connect_robot(ROBOT_IP)
print("机械臂初始化成功")
# todo 机械臂运动控制函数(笛卡尔位姿运动) (代码复用)
def move_robot(pose, wait=True):
"""
移动到指定位姿(笛卡尔)
pose: dict {'x':, 'y':, 'z':, 'rx':, 'ry':, 'rz':}
wait: 是否等待完成
"""
if not is_connected:
raise RuntimeError("机械臂未连接")
try:
move_id = robot.movel(pose, acc_speed, v_speed, move_t, move_r)
if wait:
robot.wait_move(move_id)
time.sleep(1)
return True
except Exception as e:
print(f"运动失败: {e}")
return False
# =========================
# 采集轨迹(你可以自己改)
# =========================
poses = [
PHOTO_POS1,
PHOTO_POS2,
PHOTO_POS3,
PHOTO_POS4,
PHOTO_POS5,
PHOTO_POS6,
PHOTO_POS7,
PHOTO_POS8,
PHOTO_POS9,
PHOTO_POS10,
]
for dx in [0.0, 0.08, 0.16]:
for dy in [-0.08, 0.0, 0.08]:
pose = {
"x": PHOTO_POS1["x"] + dx,
"y": PHOTO_POS1["y"] + dy,
"z": PHOTO_POS1["z"],
"rx": PHOTO_POS1["rx"],
"ry": PHOTO_POS1["ry"],
"rz": random.uniform(-25, 25)
}
poses.append(pose)
print(f"总采集点位: {len(poses)}")
# =========================
# 开始自动采集
# =========================
try:
for i, pose in enumerate(poses):
print(f"\n➡️ 第 {i + 1}/{len(poses)} 个点")
# 移动机械臂
move_robot(pose)
# 等待稳定
time.sleep(1)
# 获取图像
frames = pipeline.wait_for_frames()
aligned_frames = align.process(frames)
color_frame = aligned_frames.get_color_frame()
depth_frame = aligned_frames.get_depth_frame()
if not color_frame:
continue
color_image = np.asanyarray(color_frame.get_data())
depth_image = np.asanyarray(depth_frame.get_data())
# 保存
name = f"{img_id:06d}"
cv2.imwrite(f"{IMG_DIR}/{name}.jpg", color_image)
cv2.imwrite(f"{DEPTH_DIR}/{name}.png", depth_image)
print(f"保存 {name}")
img_id += 1
# 可视化
cv2.imshow("capture", color_image)
cv2.waitKey(1)
print("\n自动采集完成")
finally:
pipeline.stop()
cv2.destroyAllWindows()
print("相机关闭")
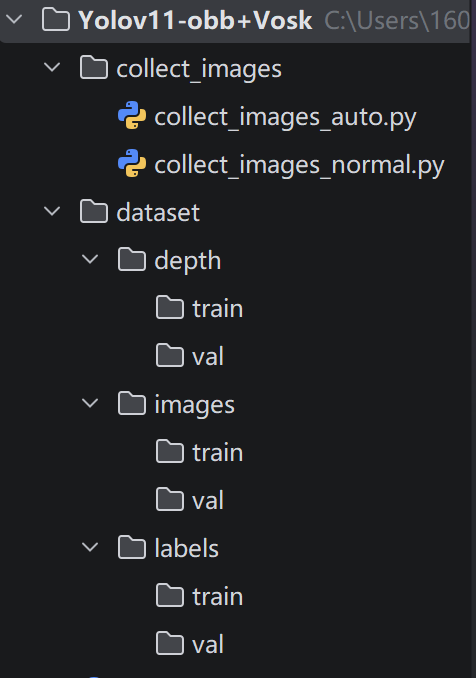
文件架构应为:
大家可以动手采集一下所需物体的数据,明天我们将开始进行非常痛苦的标注工作

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)