MATLAB实现最大熵法图像分割实战指南
熵(Entropy)的概念最初源于热力学,描述了系统状态的无序程度。在信息论领域,克劳德·香农将熵的概念引入,用以衡量信息的不确定性或信息量。在图像处理中,最大熵法作为一种经典的图像分割技术,主要依据图像的熵值来确定最优分割结果,力求在满足一定的约束条件下,获得信息量最大的分割图像。在进行图像分割时,合适的参数选择对于算法的性能有着至关重要的影响。本章将深入探讨如何定义和选择窗口参数和阈值,以确保

简介:最大熵法是一种基于信息论的图像分割技术,通过最大化子区域熵值,减少先验知识依赖,提高分割的客观性和鲁棒性。本文详细介绍了最大熵法的基本原理和在MATLAB中的实现步骤,包括图像预处理、分割参数定义、像素熵计算、优化模型构建、执行分割和后处理。同时,分析了源代码,展示了在医学影像分析、遥感图像处理和生物医学图像识别中的应用。通过学习本课程,读者可以深入理解并掌握最大熵法的实战应用,提升编程和图像处理技能。 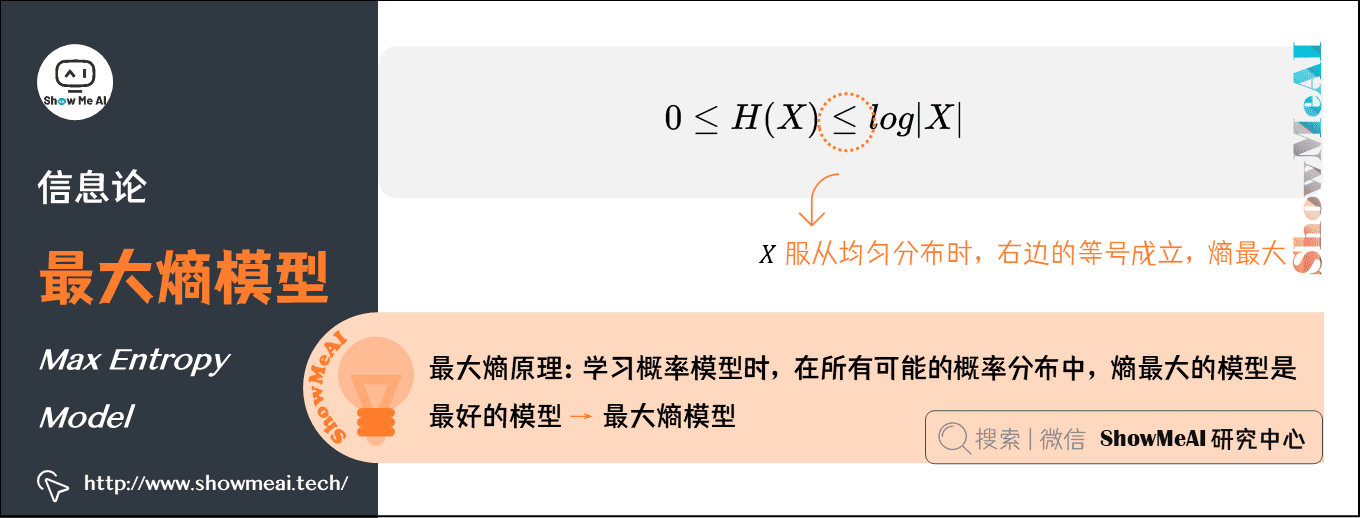
1. 最大熵法基本原理
1.1 熵的定义及其在信息论中的地位
熵(Entropy)的概念最初源于热力学,描述了系统状态的无序程度。在信息论领域,克劳德·香农将熵的概念引入,用以衡量信息的不确定性或信息量。在图像处理中,最大熵法作为一种经典的图像分割技术,主要依据图像的熵值来确定最优分割结果,力求在满足一定的约束条件下,获得信息量最大的分割图像。
1.2 最大熵法的数学基础
最大熵法基于统计学原理,其核心思想是在已知图像概率分布的部分信息下,构造一个具有最大熵值的概率模型,以保证图像信息的最大保留和最小偏见。具体而言,通过引入拉格朗日乘数法,将问题转化为求解优化问题,即在满足一定约束条件的情况下,寻找使熵值达到最大的概率分布。
1.3 最大熵法在图像分割中的应用
最大熵法在图像分割中的应用,主要是通过对图像像素的熵值计算,进而进行图像的优化分割。这一过程会涉及到多个参数和模型的选择与调整,以求达到图像分割的最优状态。在后续章节中,我们将具体展开图像预处理步骤、分割参数定义、像素熵计算方法等话题,深入探讨最大熵法在图像处理中的实际应用。
2. 图像预处理步骤
2.1 图像去噪处理
在图像处理中,噪声是影响图像质量的重要因素,它会干扰图像的分析和识别。图像去噪是图像预处理的重要步骤之一,其目的是在尽可能保留图像重要特征的前提下,减少噪声对图像的影响。
2.1.1 去噪算法的选择与原理
选择合适的去噪算法对于达到良好的图像去噪效果至关重要。常见的图像去噪算法有:
- 均值滤波 :通过将目标像素点的值替换为其周围邻域像素点的均值,来达到平滑图像的目的。这种方法适用于去除随机噪声,但会使图像变得模糊。
- 中值滤波 :将目标像素点的值替换为其邻域像素点值的中位数。中值滤波对于消除椒盐噪声特别有效,并且可以在一定程度上保留边缘信息。
- 高斯滤波 :基于高斯分布的权重来对像素点进行加权平均,其核心思想是离中心点越近的像素点对中心点的影响越大。高斯滤波适用于去除高斯噪声,能够较好地保持图像的边缘特性。
2.1.2 实际去噪效果比较
为了比较不同去噪算法的实际效果,我们可以通过MATLAB实现并比较这些算法:
% 原始带噪声的图像
noisy_image = imread('noisy_image.jpg');
% 均值滤波
mean_filtered = filter2(fspecial('average', [3 3]), noisy_image, 'same');
% 中值滤波
median_filtered = medfilt2(noisy_image, [3 3]);
% 高斯滤波
gaussian_filtered = imgaussfilt(noisy_image, 2);
% 显示原图与去噪后的图像对比
figure;
subplot(2,2,1), imshow(noisy_image), title('Original Image');
subplot(2,2,2), imshow(mean_filtered), title('Mean Filter');
subplot(2,2,3), imshow(median_filtered), title('Median Filter');
subplot(2,2,4), imshow(gaussian_filtered), title('Gaussian Filter');
2.2 图像增强技术
图像增强技术用于改善图像的视觉效果,增强特定的图像特征,以便于后续处理和分析。常见的图像增强技术包括对比度调整和边缘增强方法。
2.2.1 对比度调整
对比度是图像中明暗区域的差异程度。通过调整对比度,可以改善图像的视觉效果,使得图像的细节更加明显。实现对比度增强的常用方法是线性变换。
% 假设输入图像为im
im = imread('original_image.jpg');
% 线性变换实现对比度增强
min_val = min(im(:));
max_val = max(im(:));
enhanced_im = double(im - min_val) / (max_val - min_val) * 255;
enhanced_im = uint8(enhanced_im);
imshow(enhanced_im);
2.2.2 边缘增强方法
边缘增强的目的是突出图像中的边缘信息,常用的技术有Sobel算子和Canny算子。
Sobel算子利用梯度幅值进行边缘检测,其核心思想是沿着图像的水平和垂直方向分别进行卷积,然后将这两个方向的计算结果组合起来得到边缘信息。
% Sobel边缘检测
im = imread('original_image.jpg');
im = rgb2gray(im); % 转换为灰度图像
sobel_x = fspecial('sobel');
sobel_y = fspecial('sobel');
edge_sobel_x = imfilter(double(im), sobel_x);
edge_sobel_y = imfilter(double(im), sobel_y);
edge_sobel = sqrt(edge_sobel_x.^2 + edge_sobel_y.^2);
figure, imshow(edge_sobel, []);
Canny算子是一种优化的边缘检测算子,通过计算梯度幅度和方向,非极大值抑制和双阈值检测来确定边缘。Canny算子能更有效地检测到图像的边缘。
% Canny边缘检测
im = imread('original_image.jpg');
im = rgb2gray(im);
edge_canny = edge(im, 'canny');
figure, imshow(edge_canny);
这些去噪和增强技术能够为图像分割提供更好的输入图像,从而提高分割质量,为后续的图像处理步骤奠定坚实的基础。
3. 分割参数定义
在进行图像分割时,合适的参数选择对于算法的性能有着至关重要的影响。本章将深入探讨如何定义和选择窗口参数和阈值,以确保图像分割能够准确地提取目标区域。
3.1 窗口参数的选择
3.1.1 参数选取的标准
在图像处理中,窗口参数通常包括窗口的大小、形状、方向等。选择窗口参数时,需要综合考虑图像的特征、目标物体的大小、形状以及场景的复杂程度。
- 窗口大小: 较小的窗口可能会导致噪声的放大,而较大的窗口则可能忽略掉小目标的细节。窗口大小的选择通常需要在平滑和细节保留之间做出平衡。
- 窗口形状: 窗口可以是矩形、圆形或其他任何形状。矩形窗口在计算上更为高效,而圆形窗口可能更适合提取圆形或曲面结构的目标。
- 窗口方向: 对于具有方向性的目标,特定方向的窗口可能能够更好地提取出目标的特征。
3.1.2 窗口大小与形状的影响
窗口参数的调整需要根据具体的应用场景进行定制化选择。下面是通过几个实验来演示窗口参数调整对分割结果的影响。
- 实验设计: 选取不同大小和形状的窗口对同一图像进行处理,并分析分割结果。
- 实验过程:
- 使用3x3、5x5、7x7大小的正方形窗口。
- 使用4x4大小的圆形窗口。
- 实验结果:
- 较小的窗口对噪声敏感,导致分割结果的不连续。
- 较大的窗口虽然减少了噪声,但也模糊了目标的边缘。
- 圆形窗口相较于正方形窗口,对于圆形目标的提取效果更佳。
3.2 阈值的确定方法
阈值是图像分割中用于区分目标和背景的分割点。选择合适的阈值可以有效地将图像分割成不同的部分。阈值分为全局阈值和局部阈值,每种方法都有其适用的场景和优缺点。
3.2.1 全局阈值与局部阈值
- 全局阈值: 全局阈值是整个图像固定的单一值,适用于目标与背景对比度较大且均匀的图像。
- 局部阈值: 局部阈值会根据图像局部区域的亮度自动调整,适用于光照不均匀或目标和背景对比度变化较大的图像。
3.2.2 阈值选取的优化策略
优化阈值的选取可以提高图像分割的准确性。以下是几种常见的阈值选取优化策略:
- Otsu方法: 自动计算图像直方图的最小类间方差,从而得到最优全局阈值。
- 迭代阈值方法: 通过迭代的方式逐步逼近全局最优阈值。
- 局部阈值方法: 根据局部区域的亮度特征动态调整阈值。
3.2.3 阈值选取的代码实践
下面的代码演示如何使用Otsu方法确定全局阈值,并通过Python的OpenCV库实现。
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.png', cv2.IMREAD_GRAYSCALE)
# 使用Otsu方法计算全局阈值
_, thresh = cv2.threshold(image, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 显示结果
cv2.imshow('Original Image', image)
cv2.imshow('Otsu Threshold', thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()
在上述代码中, cv2.threshold() 函数使用了Otsu的二值化方法来自动计算阈值。这种方法的优点是不需要手动指定阈值,能够适应图像整体的亮度变化,适用于目标和背景对比度差异不大的情况。
选择合适的窗口参数和阈值是图像分割过程中的关键步骤。通过上述理论和实践的探讨,可以更好地理解参数选取的重要性,并能够根据具体的应用场景来定制化地调整参数。
4. 像素熵的计算方法
4.1 熵的概念及其性质
4.1.1 熵的数学定义
在信息论中,熵是度量信息量的一个基本概念,它描述了信息的不确定性。在数学上,熵通常用以量化数据的复杂性或随机性。对于一个离散随机变量,其熵H(X)定义如下:
[ H(X) = -\sum_{i=1}^{n} p(x_i) \log p(x_i) ]
其中,( p(x_i) )是随机变量X取第i个值的概率。熵的单位是比特(bit)。
在图像处理中,像素熵指的是图像中像素值的分布情况,反映了图像的细节和纹理复杂度。高熵值意味着图像中存在较多的细节和变化;而低熵值则表示图像较为平坦,细节较少。
4.1.2 熵在图像处理中的作用
在图像分割任务中,像素熵可以作为特征之一用于辅助决策。特别是在纹理丰富的区域,高像素熵值往往指示了边界的位置,从而帮助算法准确地定位分割线。
此外,熵在图像编码、压缩以及增强等应用中也有重要应用。例如,在JPEG压缩算法中,对熵编码的应用可以有效减少图像文件的大小。在图像增强中,通过调整图像的熵值,可以增强图像的细节,改善图像的视觉质量。
4.2 像素熵计算实例分析
4.2.1 直方图法计算像素熵
直方图法是一种常用的像素熵计算方法。具体步骤如下:
- 计算图像的灰度直方图。
- 根据直方图计算每个灰度级出现的概率。
- 利用上述概率值,按照熵的数学定义,计算整幅图像的像素熵。
以下是使用MATLAB代码实现直方图法计算像素熵的示例:
% 假设img为灰度图像矩阵
counts = imhist(img); % 计算灰度直方图
totalPixels = sum(counts); % 计算总像素数
probabilities = counts / totalPixels; % 计算概率
entropy = -sum(probabilities .* log2(probabilities + eps)); % 计算像素熵
在上述代码中, imhist 函数用于生成图像的直方图, sum 函数用于累加像素数, log2 函数用于计算以2为底的对数, eps 是为了避免概率为零时的对数计算错误。
4.2.2 基于邻域的像素熵计算
为了提高像素熵计算的准确性,可以考虑像素邻域的信息。基于邻域的像素熵计算方法考虑到了像素的空间相关性,这通常对纹理分割特别有用。计算步骤可以分为:
- 确定每个像素的邻域窗口。
- 计算邻域窗口内像素值的直方图。
- 按照直方图计算窗口内像素熵。
- 将每个像素的熵值与其邻域窗口中心像素对应起来。
以下是基于邻域的像素熵计算代码示例:
% 假设img为灰度图像矩阵,windowSize为邻域窗口大小
entropyMap = zeros(size(img)); % 初始化熵值图
for i = 1:size(img, 1)
for j = 1:size(img, 2)
% 提取当前像素的邻域
window = img(max(i-windowSize, 1):min(i+windowSize, size(img, 1)), ...
max(j-windowSize, 1):min(j+windowSize, size(img, 2)));
counts = imhist(window(:)); % 计算邻域直方图
totalPixels = sum(counts); % 计算总像素数
probabilities = counts / totalPixels; % 计算概率
entropyMap(i, j) = -sum(probabilities .* log2(probabilities + eps)); % 计算像素熵
end
end
在上述代码中,我们使用双层循环遍历图像中的每个像素,并在每次迭代中提取该像素的邻域窗口。然后,我们计算窗口内所有像素的直方图并根据直方图计算窗口的像素熵,最后将计算得到的熵值赋给熵值图 entropyMap 。
通过计算邻域的像素熵,我们可以获得一个反映图像纹理复杂性的熵值图。这个熵值图可以用于指导后续的图像分割算法,特别是对于纹理分割效果显著。
5. 优化模型构建
在图像分割的任务中,优化模型的构建是核心部分。模型不仅需要考虑理论基础的稳固性,还需要通过有效的求解算法来实现,并且结果需要经过验证来保证准确性。本章将对优化模型构建的整个流程进行深入探讨。
5.1 模型构建的理论基础
5.1.1 最大熵原理的数学描述
最大熵原理是一种基于统计学的方法,它假设在满足已知信息的情况下,未知的信息会按照均匀分布,即熵达到最大。在图像分割中,我们通常希望分割出来的区域信息熵最大,这样可以确保分割结果的不确定性最小。
最大熵原理的数学模型可以描述为:
[ \text{Maximize} \quad H(p) = - \sum_{i=1}^{n} p(x_i) \log p(x_i) ]
[ \text{Subject to} \quad \sum_{i=1}^{n} p(x_i) = 1 \quad \text{and} \quad \sum_{i=1}^{n} p(x_i) f_k(x_i) = m_k \quad \text{for } k=1,\dots,K ]
在这里,(H(p))是概率分布(p(x_i))的熵,(m_k)是第(k)个特征矩的期望值。求解该问题,通常使用拉格朗日乘数法或凸优化技术。
5.1.2 优化算法的选择
为了求解上述优化问题,我们需要选择合适的算法。常见的算法包括梯度下降法、牛顿法、拟牛顿法以及梯度下降法的变体如Adam优化算法。在图像分割任务中,由于模型可能存在多个局部最优解,因此需要选择那些能够在全局范围内寻优的算法,或者通过引入正则化项来防止过拟合。
5.2 模型求解与验证
5.2.1 求解算法的实施步骤
对于上述最大熵模型的求解,可以采用以下步骤:
- 初始化参数 :设置初始的概率分布(p^{(0)}),以及拉格朗日乘数(\lambda^{(0)})。
- 迭代更新 :通过梯度下降法或牛顿法迭代更新(p)和(\lambda),直到满足收敛条件。
- 约束检查 :确保每一步更新后,概率分布和特征矩的约束都被满足。
- 收敛性判断 :当(p)的更新幅度小于某个阈值或者迭代次数达到预定值时,算法终止。
5.2.2 模型结果的验证方法
模型验证是确保分割准确性的关键步骤。验证方法可以包括:
- 分割准确性评估 :通过比较分割结果与真实标签来计算分割的准确率、召回率和F1分数。
- 交叉验证 :使用交叉验证的方法来评估模型的泛化能力。
- 可视化比较 :将分割结果与原始图像进行叠加,直观检查分割效果。
为了进一步展示这一章节的内容,下面给出一个使用Python和相应的库进行最大熵模型构建与求解的简单示例代码。
import numpy as np
from scipy.optimize import minimize
# 定义熵函数
def entropy(p):
return -np.sum(p * np.log(p))
# 定义约束条件函数
def constraints(p):
return np.array([np.sum(p) - 1, np.sum(p * np.arange(len(p))) - m_k])
# 初始概率分布
p_0 = np.full((n,), 1.0 / n)
# 求解最大熵问题
result = minimize(entropy, p_0, constraints={'type': 'eq', 'fun': constraints})
# 输出结果
print(result)
在此代码块中, entropy 函数计算了给定概率分布的熵值。 constraints 函数定义了概率分布需要满足的约束条件。 minimize 函数用于寻找熵函数的最大值,同时满足约束条件。需要注意的是,代码中 m_k 需要根据实际问题预先定义, n 是概率分布的维度。
在上述代码基础上,模型求解的优化过程和验证结果将为研究者提供模型构建到求解的完整框架,并可用于后续的应用场景分析。
6. 执行图像分割
6.1 分割算法的实现
图像分割是将图像转换成多个部分或区域的过程。在这些部分或区域中,每个元素都具有与同一区域中的其他元素相似的属性,但与其他区域的元素不相同。
6.1.1 程序流程图
为理解算法的执行流程,首先通过一个流程图来展示图像分割算法的主要步骤:
graph LR
A[开始] --> B[加载图像]
B --> C[预处理图像]
C --> D[应用分割算法]
D --> E[获取分割结果]
E --> F[结果评估与优化]
F --> G[结束]
在预处理阶段,图像可能会经过一系列的处理,如去噪和增强,来提高分割效果。
6.1.2 关键代码解析
在本节中,我们将展示关键的代码段,并分析其逻辑和参数。
以下是一个基于最大熵法的图像分割算法的简化版实现代码段:
import numpy as np
from skimage import io, filters, morphology
def max_entropy_segmentation(image):
# 加载图像并转换为灰度图像
img = io.imread(image, as_gray=True)
# 预处理图像,如滤波去噪等
img_filtered = filters.gaussian(img, sigma=1)
# 计算图像的熵值
entropy = -np.sum(np.multiply(img_filtered, np.log2(img_filtered + np.finfo(float).eps)), axis=1)
# 应用阈值法进行分割
threshold = np.min(entropy) + np.ptp(entropy) * 0.7
segmented_img = img_filtered > threshold
return segmented_img
segmented_image = max_entropy_segmentation('path_to_image.jpg')
io.imshow(segmented_image)
io.show()
在这个代码块中,首先导入了必要的库。然后定义了 max_entropy_segmentation 函数,该函数接受图像路径作为输入并进行一系列的图像处理步骤。首先,使用 io.imread 加载图像,然后使用 filters.gaussian 应用高斯滤波去噪。接下来,通过计算熵值,找到一个基于熵值的阈值来分割图像。最后,返回分割后的图像并使用 io.imshow 显示。
在进行分割时,关键在于阈值的选择。此代码中使用了0.7倍的熵值范围,这是一个经验值,实际应用中可能需要根据具体情况调整。
6.2 分割结果的评估
图像分割之后,通常需要对其准确性进行评估。
6.2.1 准确性评估指标
准确性评估常使用的指标包括:
- Dice相似系数(Dice coefficient) :用于量化两个样本集合的相似度。
- Jaccard指数(Jaccard index) :基于集合的相似度度量。
- 误分率(Misclassification error) :评估有多少像素被错误分类。
6.2.2 结果的可视化展示
分割后的结果应以直观的图形方式展示,一般会使用伪彩色或轮廓线来突出显示分割区域。此外,对于医学影像或遥感图像,标记真实的像素或区域是评估准确性的关键步骤。
from skimage import measure, color
# 计算分割区域的轮廓线
contours = measure.findContours(segmented_image.astype(np.uint8), mode='outer')
# 将分割结果的轮廓线添加到原图上进行展示
segmented_with_contours = color.label2rgb(measure.label(segmented_image), image=img, kind='overlay', bg_label=0, alpha=0.5)
io.imshow(segmented_with_contours)
io.show()
以上代码块使用了 measure.findContours 来找到分割区域的轮廓,并使用 color.label2rgb 将标记结果添加到原图像上,创建了一个带有轮廓线的伪彩色图像以进行可视化展示。
7. 后处理技术
在执行图像分割之后,为了改善分割结果的质量,通常会采用后处理技术。后处理不仅可以清理分割结果中的噪声,还可以将图像中的相关区域合并在一起,以便于后续的分析与识别。
7.1 开运算和闭运算
开运算和闭运算是形态学操作中的两种基本方法,它们对于图像的局部区域进行处理,可以去除小的噪声点,同时保持较大区域的形状和大小。
7.1.1 开运算与闭运算的原理
开运算 是一种用来“清除”小对象并平滑较大对象边界的方法。它首先执行腐蚀操作,然后再进行膨胀操作。开运算可以移除小于结构元素的小对象,并且可以断开两个相邻对象之间的细小连接,但对较大对象的影响较小。
开运算 = 腐蚀 -> 膨胀
闭运算 与开运算相反,它首先进行膨胀操作,然后进行腐蚀操作。闭运算可以填满对象内部的小洞,并且连接邻近的对象,但对较大对象的影响较小。
闭运算 = 膨胀 -> 腐蚀
7.1.2 实际应用效果分析
在医学图像处理中,开运算常用于移除图像中的小斑点噪声,而闭运算常用于连接断开的血管或组织。在工业视觉检测中,这两种运算可以帮助清理和连接零件边缘,使图像更便于分析。
7.2 区域标记与合并
图像分割后,常常得到的是许多小的连通区域,为了进行更高效的后续处理,需要对这些区域进行标记和合并。
7.2.1 区域标记技术
区域标记是一种将图像中所有连通区域进行标记的过程。每个连通区域被赋予一个唯一的标识符,以便于后续的处理和分析。
graph TD;
A[原始图像] --> B[标记连通区域];
B --> C[每个区域被赋予唯一标识];
区域标记可以采用深度优先搜索(DFS)或广度优先搜索(BFS)等算法来实现。
7.2.2 区域合并策略
区域合并是根据一定的合并标准,将具有相似属性的区域合并为一个区域的过程。比如,如果两个区域的像素值非常接近,或者它们在空间上是连续的,则可以考虑将它们合并。
区域合并的标准可以基于像素的颜色、纹理、形状或者上下文信息等多种特征。例如,在一个特定的阈值范围内,如果两个相邻区域的像素值相差不大,则可认为它们是相似的。
通过上述的区域标记和合并,可以进一步优化图像分割的结果,使其更加符合实际应用的需求。在实际应用中,通常需要根据具体情况调整标记与合并的标准和方法,以达到最佳的后处理效果。
简介:最大熵法是一种基于信息论的图像分割技术,通过最大化子区域熵值,减少先验知识依赖,提高分割的客观性和鲁棒性。本文详细介绍了最大熵法的基本原理和在MATLAB中的实现步骤,包括图像预处理、分割参数定义、像素熵计算、优化模型构建、执行分割和后处理。同时,分析了源代码,展示了在医学影像分析、遥感图像处理和生物医学图像识别中的应用。通过学习本课程,读者可以深入理解并掌握最大熵法的实战应用,提升编程和图像处理技能。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 29
29 0
0- 0



 已为社区贡献155条内容
已为社区贡献155条内容

所有评论(0)