AI边缘计算矿山罐笼防超员方案
一、核心需求与挑战
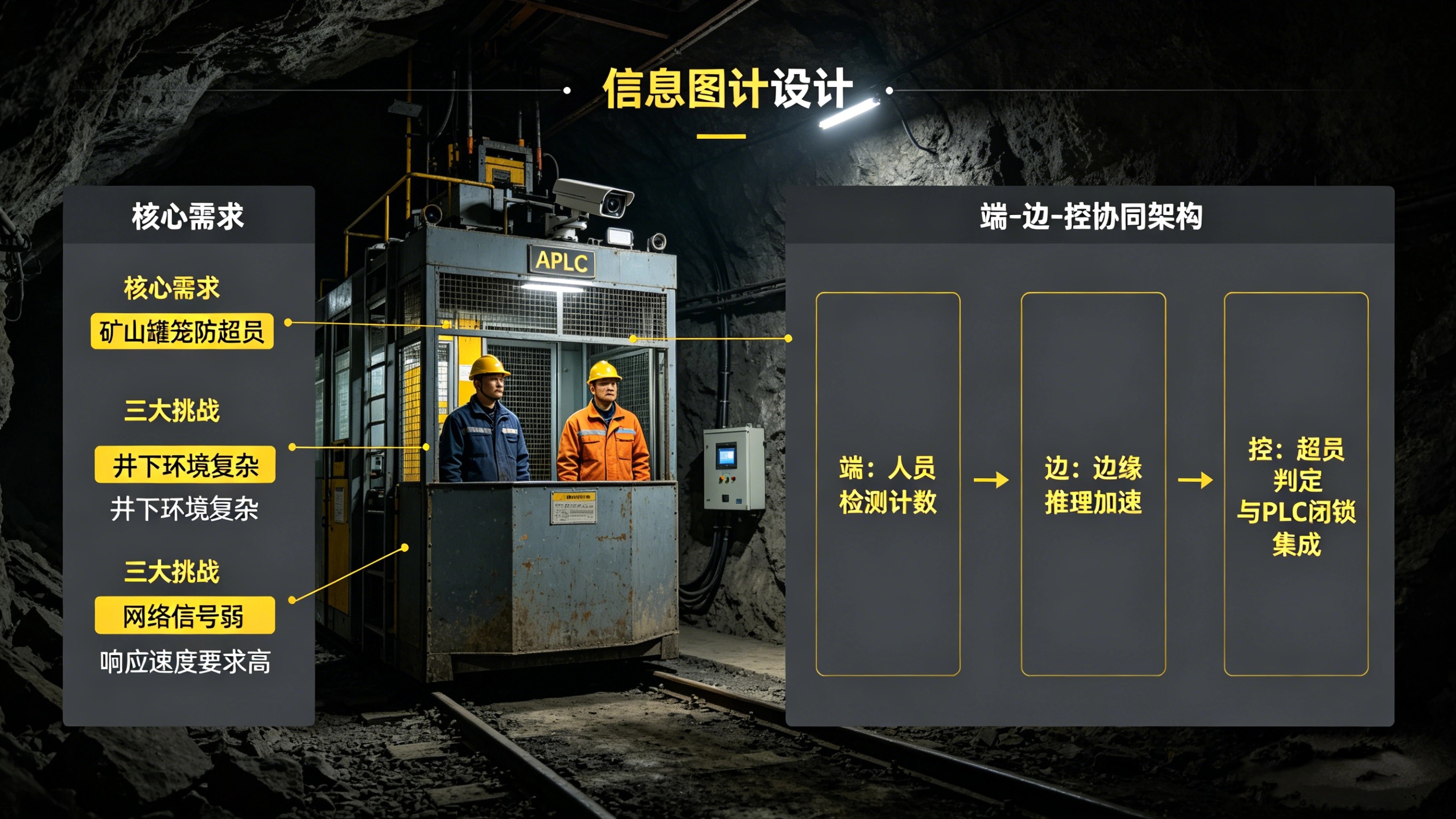
矿山罐笼作为井下人员运输的核心设备,其超员问题直接关系到矿工生命安全与设备运行安全。一旦超员,轻则导致提升机过载、罐笼晃动加剧,重则引发坠罐、断绳等恶性事故。因此,防超员系统的核心需求是:实时、准确地统计罐笼内人数,当人数超过核定载员(如18人)时,立即发出告警并自动闭锁提升机控制系统,杜绝超员运行。
然而,实现这一需求面临三大技术挑战:
第一,井下环境极端恶劣。 罐笼内部空间狭小,人员密集时相互遮挡严重;巷道内光线昏暗,通常照度低于10 lux,且存在大量粉尘、水雾;罐笼运行中会产生剧烈晃动。这些因素都极大干扰了传统摄像头的人体检测效果。
第二,网络条件不可靠。 矿井深处往往没有稳定的工业以太网,或者网络带宽极低、时延大,无法依赖云端服务器进行视频分析。系统必须能够独立在本地完成所有计算和决策,即具备完全的离线运行能力。
第三,响应速度要求极高。 提升机从启动到加速的时间很短,防超员系统必须在人员进入罐笼后的数秒内完成检测、判定和闭锁信号输出,端到端延迟需控制在100毫秒以内,否则可能无法阻止超员提升。同时,系统必须与现有提升机PLC(可编程逻辑控制器)无缝联动,采用标准工业协议。
二、总体架构(端-边-控协同)
针对上述挑战,本方案采用“端-边-控”三层协同架构,彻底摆脱对云端的依赖,实现本地实时闭环控制。
前端(图片采集层):在罐笼内部对角位置安装两台矿用型高清摄像头。摄像头选用星光级图像传感器(最低照度0.001 lux)或红外热成像传感器,确保在黑暗、粉尘环境中仍能采集清晰图像。镜头采用120°广角,覆盖罐笼绝大部分区域;对角安装可减少单视角下的遮挡盲区。摄像头通过屏蔽网线或光纤将视频流实时传输至边缘计算盒子。
边缘(计算层):在罐笼顶部或井口墙壁上部署矿用边缘计算盒子。该设备需具备防爆认证、IP65防护等级,工作温度范围-20℃~60℃,无风扇散热设计以适应井下粉尘环境。算力要求不低于10 TOPS,内置深度学习推理加速引擎,可离线运行轻量化目标检测模型。边缘盒子接收双路视频流,实时运行人员检测算法,完成人数统计和超员判定。
控侧(执行层):边缘计算盒的输出端连接三部分设备:一是声光报警器(安装在井口信号房),用于语音提示和警报;二是提升机控制柜内的闭锁继电器,通过干接点信号或Modbus TCP协议与PLC通信;三是井口调度大屏,实时显示当前人数和报警状态。当边缘盒子判定超员时,立即向PLC输出闭锁信号;PLC逻辑中设定“收到闭锁信号时禁止提升机启动(或仅允许下放、禁止上提)”。只有人数降至核定数以下且人工按下复位按钮后,闭锁才能解除。
整个架构无需连接矿井环网或云端,所有计算在本地完成,断网状态下功能完全正常,满足矿山安全规程对“独立于网络”的要求。
三、关键技术方案
1. 人员检测与计数模型
算法选择YOLOv8或RT-DETR作为基础检测框架。针对罐笼俯视或侧视视角,训练专用的人头-肩部检测模型——因为罐笼内人员身体常被遮挡,但头部和肩部相对完整。训练数据集需包含井下真实场景:低照度、粉尘、反光衣、安全帽等,并通过数据增强模拟各种干扰。
为了应对严重遮挡,采用双摄像头交叉验证机制:AI边缘盒子分别检测各自画面中的人员,然后通过对比匹配,融合两路结果,去除重复计数。同时引入轻量级ReID(行人重识别) 模块,对进出罐笼的人员进行轨迹跟踪,避免进出过程中被重复统计。最终输出罐笼内实时人数,准确率可达98%以上。
2. 边缘计算推理加速
边缘盒子内模型推理需满足实时性要求。首先将PyTorch训练的模型转换为ONNX格式,再使用TensorRT进行INT8量化加速,单帧检测耗时从原始50ms降至30ms以内。同时采用多线程流水线:一个线程负责视频解码和预处理,另一个线程负责推理,第三个线程负责后处理和逻辑判定。双路视频交替处理,整体帧率可达25fps。
3. 超员判定与PLC闭锁集成
超员阈值可配置(例如核定18人),并支持分时段、分班次动态调整。系统设两级报警:
- 预报警:当人数达到核定数的90%(例如16人)时,边缘盒子通过语音模块提示“即将满员,请等待下一罐”,提醒候罐人员停止进入。
- 超员报警:人数超过核定数时,立即触发声光报警(红灯闪烁+“超员危险,禁止启动”语音),同时通过硬接线IO或Modbus TCP向PLC发送闭锁信号。
PLC侧逻辑:接收闭锁信号后,将提升机控制回路中的“允许启动”触点断开,司机按下启动按钮无效。解除闭锁需满足两个条件:边缘盒检测到人数≤核定数,且井口信号房人工按下“复位”按钮(防止自动复位导致频繁启停)。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)