信捷12轴设备催款锁机程序与轴参数设置教程:学习一屏多机、双工位切换与机械手下料技术
催款锁机程序信捷12轴设备程序一共十级密码到时间锁机 含一屏多机和到时间锁机程序 ,C函数设置轴参数 是学习的好资料 双工位切换上料和机械手下料 程序一万多步 采用信捷触摸屏和XDPLC
深夜的车间里突然响起此起彼伏的警报声,三台12轴联动设备齐刷刷进入锁机状态。老张叼着半根没点燃的香烟,盯着触摸屏上的红色警告框直嘬牙花子——这已经是本月第三次遇到催款锁机程序发威了。
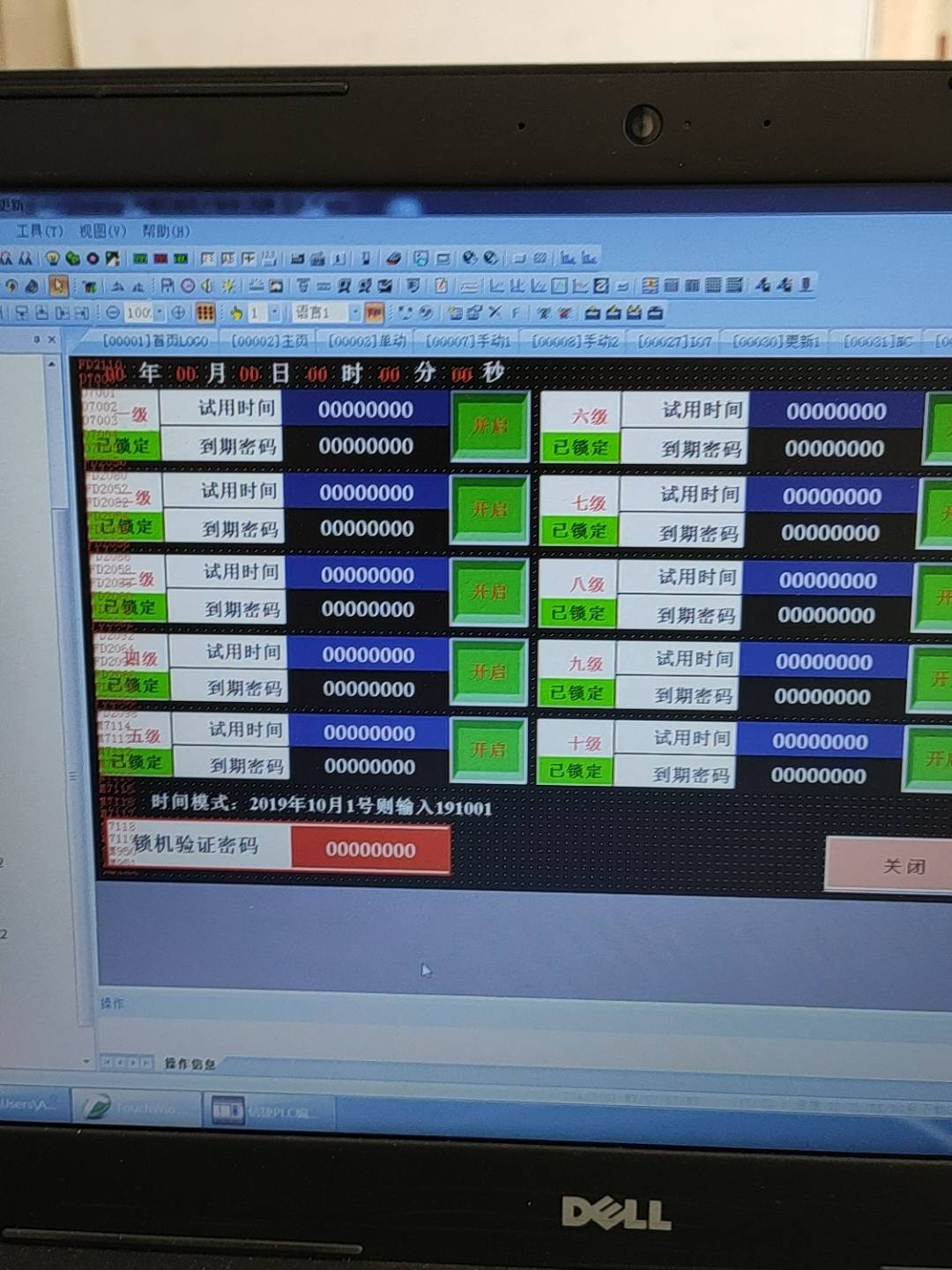
这套基于信捷XD5E系列PLC的12轴设备程序堪称工控界的"九阳真经",光是密码系统就设置了十层防护:从基础的时间锁、轴参数锁到核心算法锁,每层密码都对应着不同的设备权限。程序里藏着这样的彩蛋:
void AxisLockCheck()
{
if(SystemTimer > 0x2D9F94C3) //2024年6月30日时间戳
{
LockFlag |= 0x01; //激活基础锁
if(PasswordLevel < 5) HaltMachine(); //低级密码无法解锁
}
//...后续还有7个条件判断
}这个时间戳校验函数就像个定时炸弹,当系统时间超过设定阈值,就会逐级触发锁定机制。有意思的是第5行代码的位运算操作,用或运算累积锁机状态,这种设计让解锁过程必须按特定顺序操作。
一屏多机的架构设计堪称神来之笔,触摸屏上这个不起眼的函数:
MULTI_MACHINE_CTRL:
FOR i:=0 TO 2 DO
IF GESTURE_SWITCH[i] THEN
ACTIVE_MACHINE := i;
CALL SUBROUTINE(ACTIVE_PARAMS[i]);
END_IF
END_FOR用循环结构实现了三台设备的无缝切换,手势切换指令通过触摸屏的FIFO队列传递。特别是ACTIVE_PARAMS数组里存储的轴参数,包含了各设备独特的运动曲线数据,这可是调试时最容易出幺蛾子的地方。
催款锁机程序信捷12轴设备程序一共十级密码到时间锁机 含一屏多机和到时间锁机程序 ,C函数设置轴参数 是学习的好资料 双工位切换上料和机械手下料 程序一万多步 采用信捷触摸屏和XDPLC
双工位物料调度模块更是把状态机玩出了花,看看这个上料程序片段:
CASE CurrentState OF
1: //待机状态
IF Sensor_A THEN
GripperSpeed := LIMIT(MAX_SPEED * 0.7, 1500);
CurrentState := 2;
END_IF
2: //抓取动作
AxisMove(SYNCHRONOUS, 3, GripperSpeed);
//...后续还有6个状态分支
END_CASE这个状态机里藏着个新手容易踩的坑——第5行的速度限制函数,如果不做这个限幅处理,机械手在抓取易碎品时准会表演"天女散花"。程序里类似的安防措施还有二十多处,都是实战中摔打出来的经验。
对于想啃下这13000步程序的朋友,建议从轴参数配置函数入手:
void SetAxisParams(int axisNum, float acc, float dec)
{
if(axisNum >= MAX_AXIS) return;
AxisConfig[axisNum].Acceleration = acc * CALIBRATION_FACTOR;
AxisConfig[axisNum].Deceleration = dec * SAFETY_COEFFICIENT;
//...其他8个参数设置
}注意第4行的校准系数和第5行的安全系数,这两个魔法数字可是设备能稳定运行的关键。当年调试时为了确定这两个值,愣是让伺服电机烧坏了三个减速器。
这套程序最狠的还是它的自毁机制——当检测到非法调试时,会随机修改几个核心参数。上次有个愣头青想暴力破解,结果设备突然跳起了机械舞,急停按钮都成了摆设。所以啊,想研究这套代码,最好先备好三份备份,别问我是怎么知道的。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)