AutoWareAuto框架全解析:自动驾驶领域‘融合感知-决策规划-控制‘的代码与思维导图指南
自动驾驶,AutoWareAuto框架全框架梳理思维导图及代码注释。 授人以鱼不如授人以渔,涵盖:融合感知模块,定位模块,决策规划模块,控制模块,预测模块等较为详细的注释(并非每行都有注释)及框架梳理。 阅读Auto版本的代码时结合思维导图可以事半功倍,大厂自动驾驶技术团队多位领域技术牛人耗时两个月之作 实实在在的工作经验总结 资料是一线自动驾驶工程师辛苦工作的结果,希望您尊重知识产权不要私自外传
「啪嗒啪嗒」的键盘声里,AutoWareAuto的代码在屏幕上滚动。这玩意儿就像自动驾驶的乐高积木,不同颜色的代码块拼出完整的系统架构。咱们今天就掰开揉碎了看,记得打开你的代码编辑器同步操作。
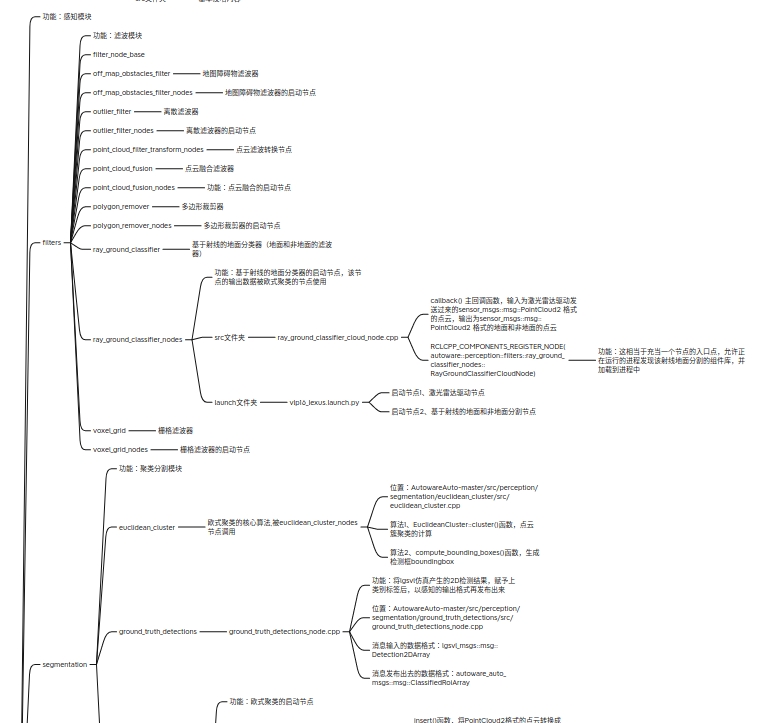
框架全景图(文字版)
想象一棵倒置的树:根节点是系统总线(ROS2),主干延伸出五个核心枝干——感知融合、定位、预测、决策规划、控制。每个枝干又分出若干子模块,比如感知融合里激光雷达点云处理就像给原始数据做马杀鸡:
// perception/lidar_process.cpp 关键片段
void LiDARCluster::process(const sensor_msgs::msg::PointCloud2& raw_cloud) {
pcl::VoxelGrid<pcl::PointXYZ> voxel_filter; // 体素降采样,点云瘦身术
voxel_filter.setLeafSize(0.2f, 0.2f, 0.2f); // 20cm立方体网格
auto filtered_cloud = voxel_filter.filter(raw_cloud);
euclidean_cluster_extraction.setClusterTolerance(0.5); // 欧式聚类,找物体边界
std::vector<pcl::PointIndices> clusters = extractor.getClusters();
// 后面还有特征提取和分类器判断物体类型...
}定位模块的时空魔法
GNSS+IMU+轮速计三件套是基本操作,重点看紧耦合的卡尔曼滤波实现。代码里藏着时间对齐的魔鬼细节:
def sync_sensors(gps_msg, imu_msg):
# 用双buffer实现硬件时钟对齐
while gps_buffer[-1].timestamp < imu_buffer[-1].timestamp:
pop_oldest(gps_buffer)
# 计算钟差补偿量,这里用了线性插值
delta = (imu_msg.timestamp - gps_buffer[-2].timestamp) / (gps_buffer[-1].timestamp - gps_buffer[-2].timestamp)
corrected_pose = interpolate(gps_buffer[-2], gps_buffer[-1], delta)决策规划的博弈论

自动驾驶,AutoWareAuto框架全框架梳理思维导图及代码注释。 授人以鱼不如授人以渔,涵盖:融合感知模块,定位模块,决策规划模块,控制模块,预测模块等较为详细的注释(并非每行都有注释)及框架梳理。 阅读Auto版本的代码时结合思维导图可以事半功倍,大厂自动驾驶技术团队多位领域技术牛人耗时两个月之作 实实在在的工作经验总结 资料是一线自动驾驶工程师辛苦工作的结果,希望您尊重知识产权不要私自外传
行为决策树里藏着老司机的驾驶哲学,注意状态机跳转时的安全校验:
// decision/state_machine.cpp 变道决策
void ChangeLaneState::onUpdate() {
if (context->surround_risk > RISK_THRESHOLD) {
transitionTo(ABORT_LANE_CHANGE); // 风险值超标时终止变道
return;
}
// 预测模块给的周围车辆轨迹在这里被解析成时空走廊
auto corridor = prediction_parser->getTimeSpaceCorridor();
if (!corridor.validate(planned_path)) {
replan_counter++; // 路径校验失败触发重规划
}
}控制模块的暴力美学
别被MPC(模型预测控制)的数学外表吓到,代码里更多的是工程trick:
# control/mpc_solver.py 权重调整策略
def auto_tune_weights(road_type, vehicle_state):
if road_type == 'HIGHWAY':
lat_error_weight = 0.8 # 高速侧重横向控制精度
jerk_weight = 1.2 # 抑制急加/减速
elif road_type == 'URBAN':
lat_error_weight = 0.5 # 城区允许更大横向余量
obstacle_weight = 2.0 # 加强障碍物避让权重
# 根据车速动态调整前瞻距离
lookahead = max(2.0, min(5.0, vehicle_state.speed * 0.8))预测模块的黑盒子
LSTM+Social LSTM的混合模型,注意数据预处理中的车道拓扑编码:
# prediction/trajectory_predictor.py 车道特征编码
def encode_lanes(nav_path):
lane_graph = build_lane_graph(nav_path, radius=100.0)
# 用图卷积网络提取车道拓扑特征
gcn_features = lane_gcn(lane_graph.nodes, lane_graph.edges)
# 与目标车辆历史轨迹特征拼接
combined_feats = torch.cat([traj_features, gcn_features], dim=-1)代码江湖水深,AutoWareAuto的模块间藏着无数隐式约定——比如感知模块输出的障碍物ID必须全局唯一,决策模块的路径规划必须包含6秒以上的时空信息。建议调试时开着rqt_graph看节点通信,比直接啃代码高效得多。
想真正吃透这套框架,得学会用ROS2 bag数据复现问题场景。某次追查幽灵刹车,最后发现是定位模块的时间戳对齐有1ms偏差,这种坑文档里可不会写。自动驾驶代码就像洋葱,剥开层层抽象后,核心永远是那些朴实无华的工程智慧。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)