探索三菱步进电机驱动器控制定位案例:从 PLC 到触摸屏的全方位实践
三菱步进电机驱动器控制的定位案例,带有触摸屏程序,plc程序!程序功能实现正反转控制,原点回归,急停报警等!触摸屏有报警显示,故障历史这些常用的画面设置,对控制多轴运动很有帮助,值得去学习一下
在自动化控制领域,步进电机的精准定位控制至关重要。今天,咱就来唠唠三菱步进电机驱动器控制的定位案例,这里面不仅涉及 PLC 程序,还有触摸屏程序,内容丰富得很,对控制多轴运动帮助极大,一起学起来!
PLC 程序实现核心功能
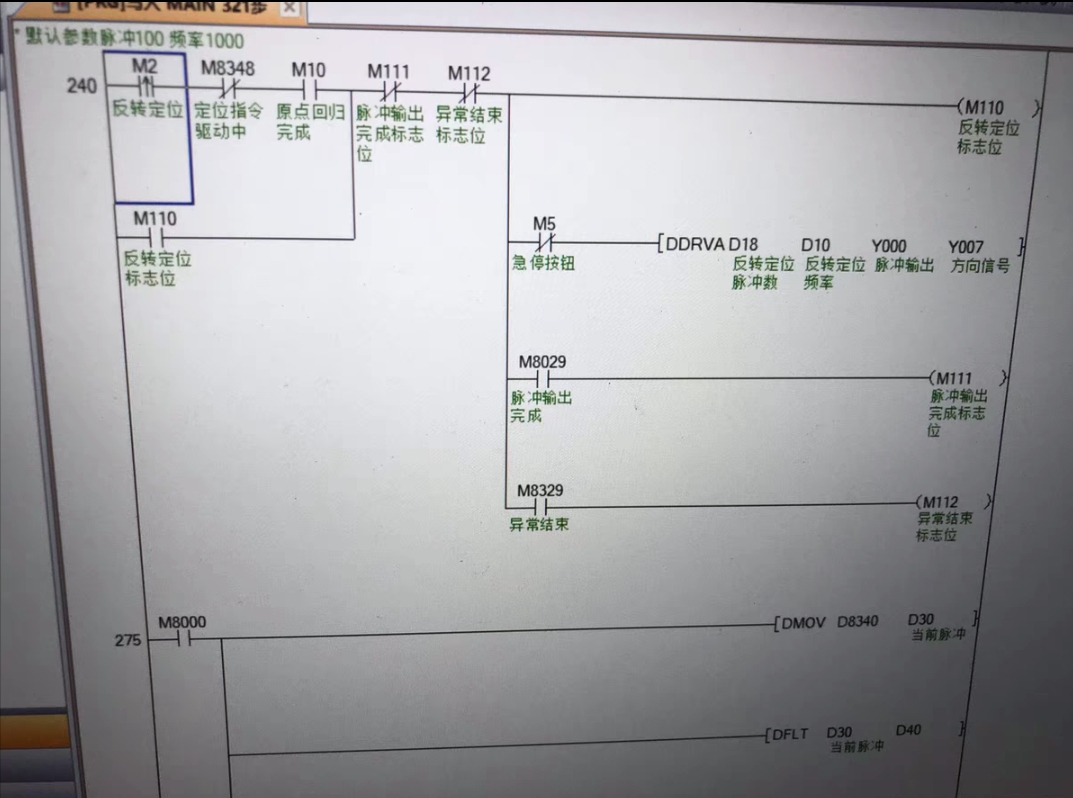
正反转控制
正反转控制是步进电机最基础的功能之一。在三菱 PLC 中,我们可以通过编写如下代码来实现:
// 定义正转和反转按钮对应的输入点
LD X0 // X0 假设为正转启动按钮
SET Y0 // Y0 控制步进电机正转脉冲输出
LD X1 // X1 假设为反转启动按钮
SET Y1 // Y1 控制步进电机反转脉冲输出这段代码很直观,当按下正转按钮(对应输入点 X0),就置位 Y0,让步进电机正转脉冲输出;按下反转按钮(对应输入点 X1),就置位 Y1,实现反转。
原点回归
原点回归是确保设备每次运行都有准确起始位置的关键步骤。
// 原点回归按钮及相关逻辑
LD X2 // X2 假设为原点回归按钮
SET M0 // 启动原点回归标志位
// 原点回归执行逻辑
LD M0
ANI X3 // X3 假设为原点传感器信号
PLSY K1000 K1000 Y0 // 以一定频率和脉冲数向原点移动
LD X3
RST M0 // 到达原点,复位原点回归标志位这段代码里,按下原点回归按钮 X2 后,置位 M0 标志位。在未检测到原点传感器信号 X3 时,通过 PLSY 指令以频率 1000Hz 和脉冲数 1000 向原点移动。一旦检测到 X3,就复位 M0,完成原点回归。
急停报警
急停报警功能是保障设备和人员安全的必备环节。
// 急停按钮及报警输出
LD X4 // X4 假设为急停按钮
RST Y0 // 停止正转脉冲输出
RST Y1 // 停止反转脉冲输出
SET Y2 // Y2 假设为报警输出点,触发报警按下急停按钮 X4,立即停止正反转脉冲输出,并触发报警输出 Y2。
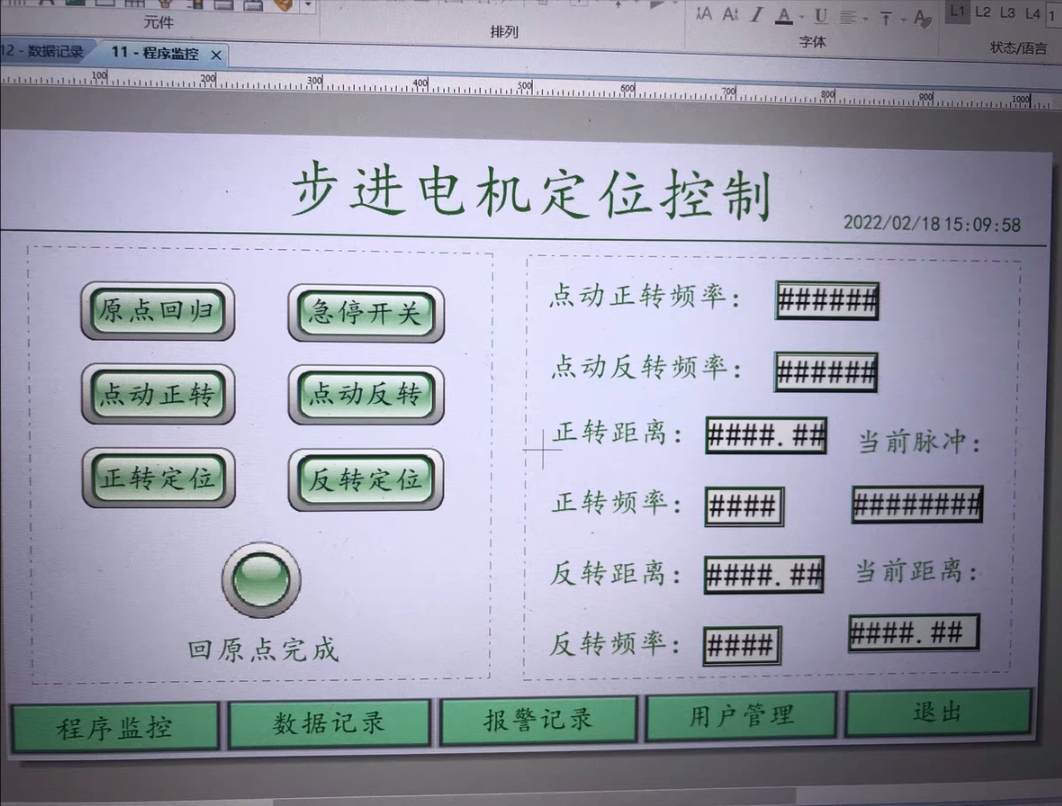
触摸屏程序的魅力
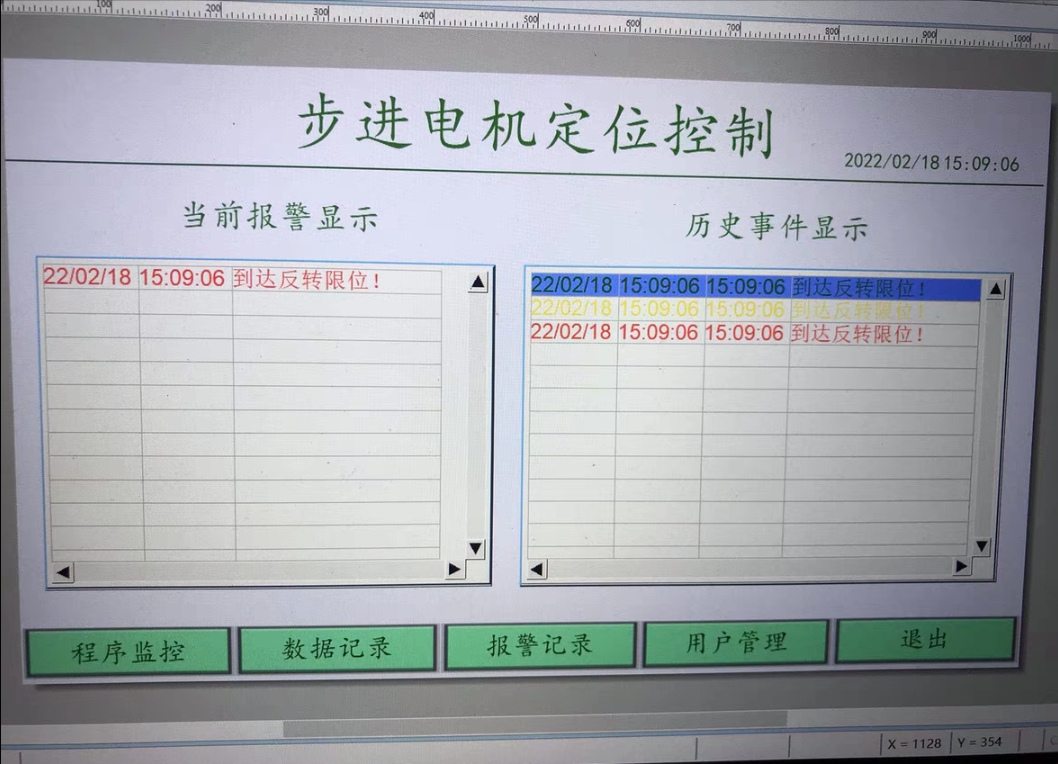
报警显示与故障历史画面
触摸屏就像是人机交互的窗口,让操作和监控变得直观方便。在触摸屏程序里,我们要设置报警显示和故障历史画面。
比如在威纶通触摸屏软件中,我们先建立与 PLC 的连接,然后创建报警显示元件。将 PLC 中报警输出点(如上面的 Y2)关联到触摸屏的报警显示区域。当 Y2 置位,触摸屏上就会弹出报警提示。
三菱步进电机驱动器控制的定位案例,带有触摸屏程序,plc程序!程序功能实现正反转控制,原点回归,急停报警等!触摸屏有报警显示,故障历史这些常用的画面设置,对控制多轴运动很有帮助,值得去学习一下
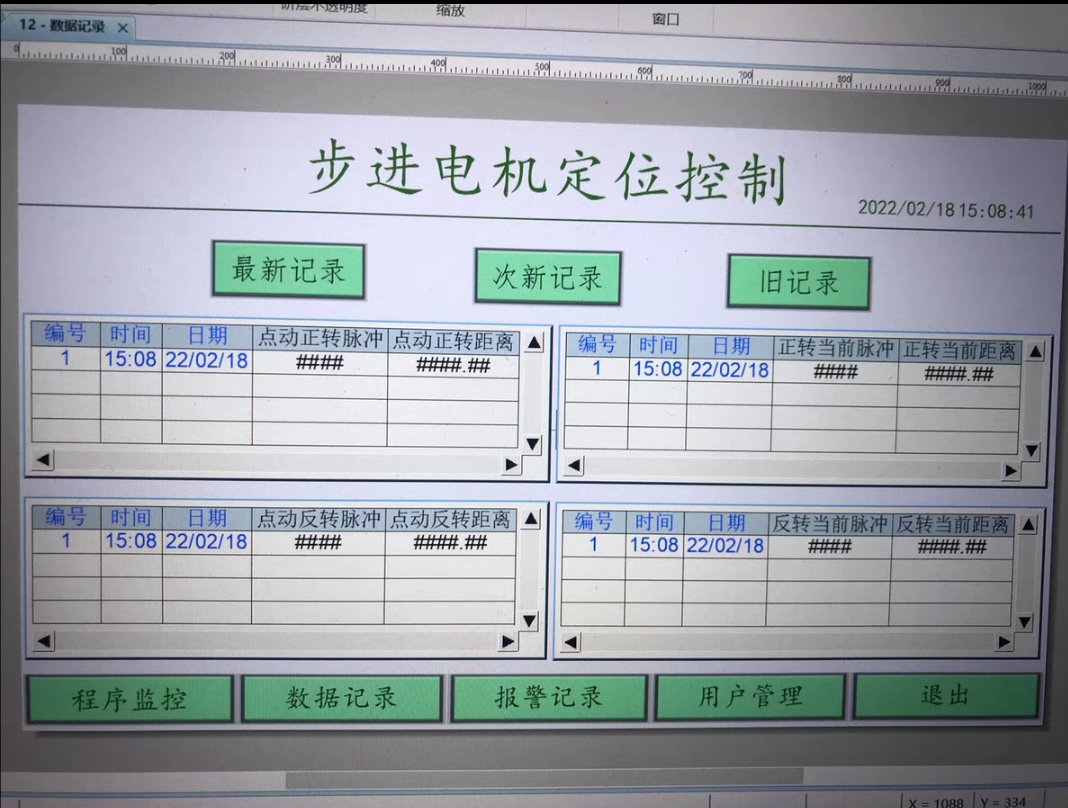
对于故障历史画面,我们可以利用触摸屏的历史记录功能。每次报警发生时,PLC 将相关信息(如报警时间、类型等)写入数据寄存器。触摸屏通过读取这些寄存器,将故障历史信息显示在画面上。
// 假设在 PLC 中编写如下代码记录报警时间
LD Y2 // 报警触发
MOV D100 T0 // 将当前时间(T0 假设为 PLC 内部时钟)存入 D100在触摸屏程序里,通过读取 D100 等寄存器的数据,就可以在故障历史画面上按时间顺序显示每次报警的时间,方便我们追溯和排查问题。
通过这个三菱步进电机驱动器控制定位案例,从 PLC 程序实现电机核心控制功能,到触摸屏程序提供友好的人机交互界面,全方位展示了自动化控制的魅力。掌握这些知识,对于控制多轴运动那可真是如虎添翼,希望大家都能从中收获满满!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)