粒子群在线自适应优化PID控制:Simulink与Matlab脚本的奇妙结合
粒子群在线自适应优化pid控制,用simulink与matlab脚本联合完成,可代入到需要的控制系统中,与传统pid对比效果。
最近玩了一把粒子群在线自适应优化PID控制,感觉超有意思,必须来跟大家分享分享!
咱先来说说啥是PID控制。PID控制可是控制系统里的经典算法啦,由比例(P)、积分(I)、微分(D)三个环节组成。传统的PID控制参数一旦确定,在整个控制过程中就基本不变了。但实际情况哪有那么简单,不同的工况下,固定的参数可不一定能带来最佳效果。
这时候,粒子群优化算法就闪亮登场啦!粒子群算法就像是一群小粒子在空间里不断探索最优解。每个粒子都有自己的位置和速度,它们通过不断调整自己的位置来寻找全局最优。
咱这次是用Simulink和Matlab脚本联合实现粒子群在线自适应优化PID控制。
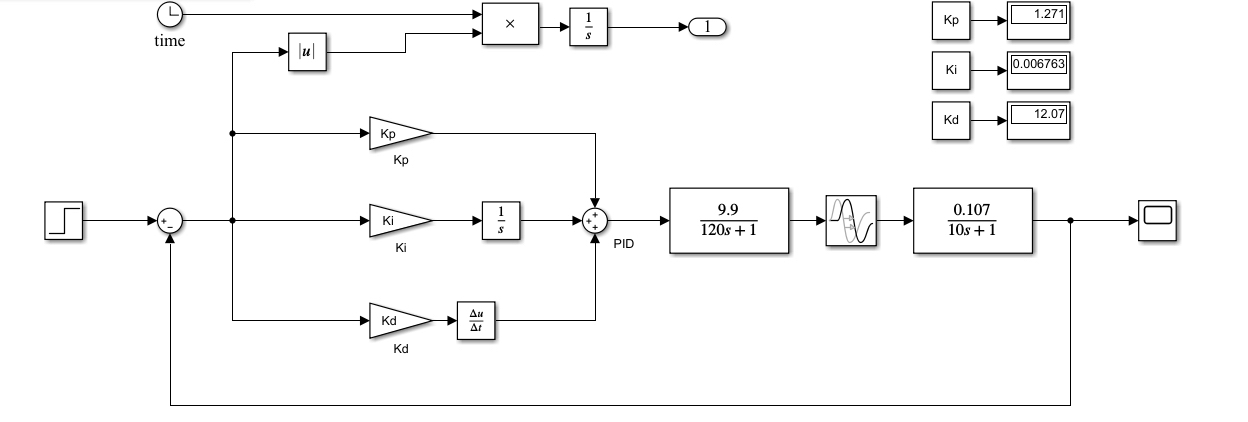
先看看Simulink这边,搭建一个基本的控制系统模型,把PID控制器加进去。代码大概长这样:
% 创建PID控制器
Kp = 1;
Ki = 0.1;
Kd = 0.01;
pidController = pid(Kp, Ki, Kd);这里就是简单地创建了一个PID控制器,设置了比例、积分、微分系数。
然后呢,再把粒子群优化算法的部分整合进来。粒子群算法的核心代码如下:
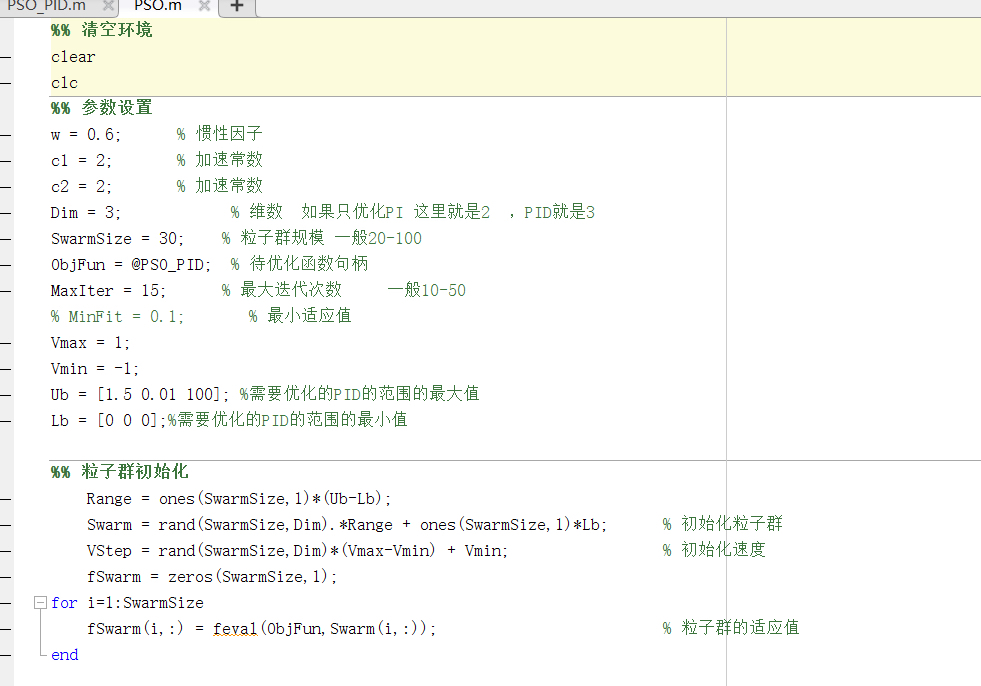
% 粒子群算法参数设置
swarmSize = 30; % 粒子群大小
maxIterations = 50; % 最大迭代次数
c1 = 1.5; % 学习因子1
c2 = 1.5; % 学习因子2
w = 0.7; % 惯性权重
% 初始化粒子群
particlePositions = zeros(swarmSize, 3); % 粒子位置,对应Kp, Ki, Kd
particleVelocities = zeros(swarmSize, 3); % 粒子速度
for i = 1:swarmSize
particlePositions[i, :] = [rand, rand, rand]; % 随机初始化位置
particleVelocities[i, :] = [rand, rand, rand]; % 随机初始化速度
end
for iter = 1:maxIterations
for i = 1:swarmSize
% 计算适应度(这里简单以误差平方和为例)
error = simulateSystem(particlePositions[i, :]);
fitness(i) = sum(error.^2);
% 更新个体最优
if fitness(i) < pBestFitness(i)
pBestFitness(i) = fitness(i);
pBestPositions(i, :) = particlePositions(i, :);
end
% 更新全局最优
if fitness(i) < gBestFitness
gBestFitness = fitness(i);
gBestPositions = particlePositions(i, :);
end
% 更新速度和位置
particleVelocities[i, :] = w * particleVelocities[i, :] +...
c1 * rand(1, 3).* (pBestPositions(i, :) - particlePositions(i, :)) +...
c2 * rand(1, 3).* (gBestPositions - particlePositions(i, :));
particlePositions[i, :] = particlePositions[i, :] + particleVelocities[i, :];
% 边界处理
particlePositions(i, :) = max(particlePositions(i, :), [0, 0, 0]);
particlePositions(i, :) = min(particlePositions(i, :), [10, 10, 10]);
end
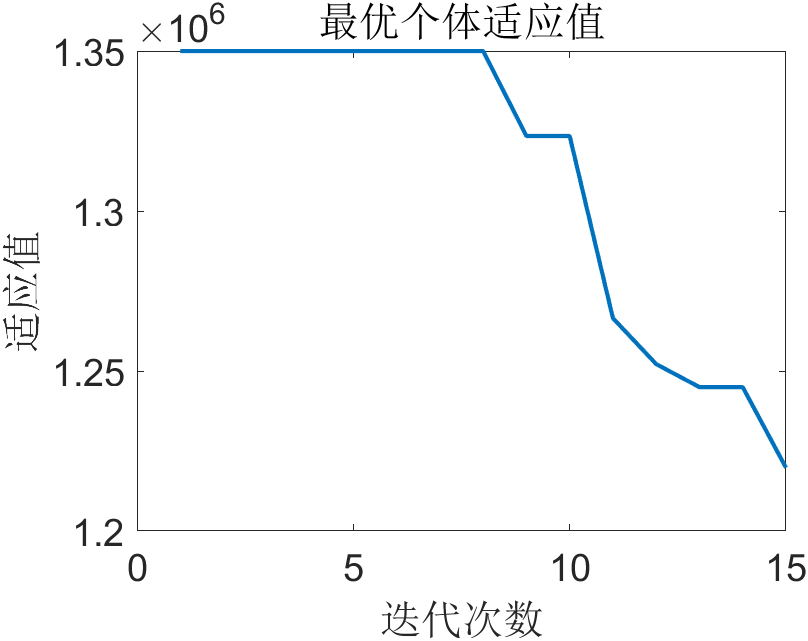
end这里解释一下,首先设置了粒子群的大小、最大迭代次数以及一些算法参数。然后初始化粒子的位置和速度,在每次迭代中,计算每个粒子的适应度(这里用误差平方和来衡量),更新个体最优和全局最优。接着根据公式更新粒子的速度和位置,最后进行边界处理,防止粒子跑出合理范围。
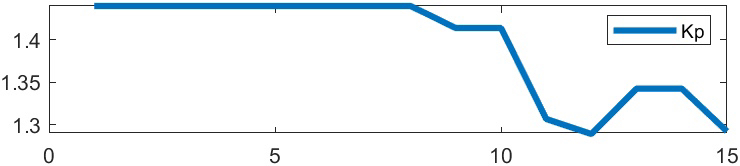
通过粒子群算法不断优化PID的参数,让控制系统能更好地适应不同情况。
最后把优化后的PID参数代入到Simulink模型中,和传统PID控制对比一下效果。
从实际效果来看,粒子群在线自适应优化PID控制明显更胜一筹!在面对不同工况时,它能更快地调整控制参数,让系统的响应更迅速、更稳定,误差也更小。传统PID控制就有点“死板”,在一些复杂情况下表现就没那么好了。
这次的探索真的让我对控制系统有了更深的理解,粒子群算法和PID控制的结合简直太妙啦!以后再遇到控制系统相关的问题,感觉有了更厉害的武器啦!
希望我的分享能给大家带来一些启发,要是你们也对这些好玩的控制算法感兴趣,不妨自己动手试试呀!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)