基于Simulink和CarSim联合仿真的纵向车辆队列控制及MPC相关问题解答
基于simulink和carsim联合仿真 纵向车辆队列控制 及更多队列控制欢迎询问 关于MPC等相关问题 多车队列联合仿真报错问题 帮助联合仿真入门和队列研究 商品包含carsim文件、simulink文件、word使用手册
从单车道到车队:Simulink+CarSim联合仿真实战
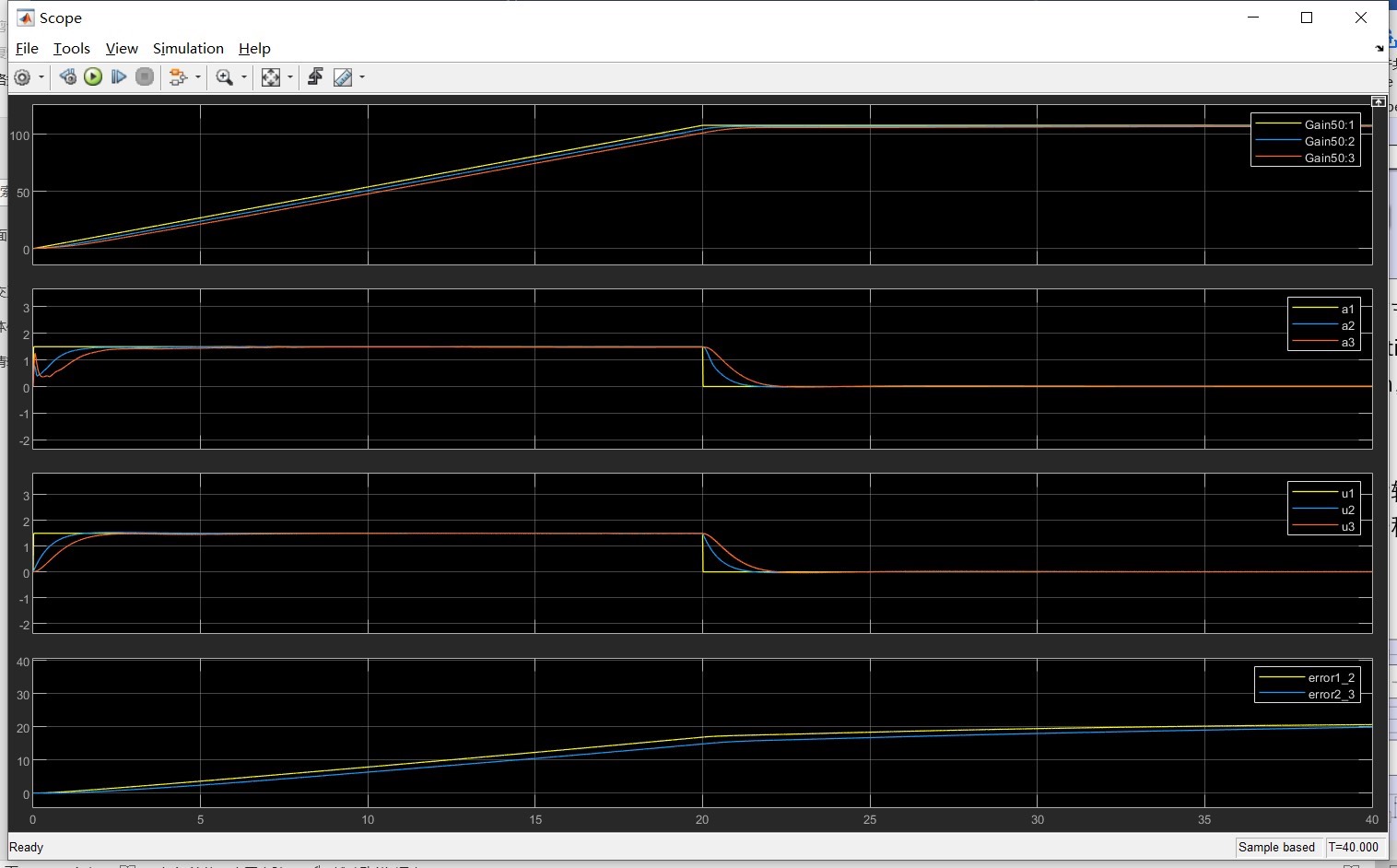
最近在研究纵向车辆队列控制时发现,很多小伙伴卡在联合仿真环境搭建和模型调试环节。特别是CarSim和Simulink的交互,稍不留神就会报些让人摸不着头脑的错误。今天就拿一个三车队列的案例,聊聊怎么避开那些坑。
先上硬货——联合仿真环境配置核心代码:
% CarSim接口初始化脚本
carsim_path = 'D:\Projects\Platoon\CarsimData';
setenv('CARSIM_DATABASE', carsim_path);
vsolver('setup', '8.02'); % 对应CarSim版本号这段代码经常被忽略,但路径配置错误会导致后续仿真直接崩掉。特别是工程文件迁移时,记得检查路径中的反斜杠是否转义。
MPC控制器在队列中的应用
基于simulink和carsim联合仿真 纵向车辆队列控制 及更多队列控制欢迎询问 关于MPC等相关问题 多车队列联合仿真报错问题 帮助联合仿真入门和队列研究 商品包含carsim文件、simulink文件、word使用手册
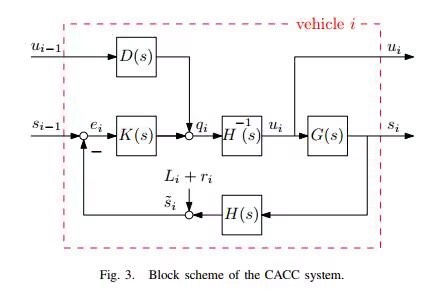
队列控制的核心在于前车状态预测。这里举个简化的MPC代价函数实现:
function u = mpc_controller(x0, ref_trajectory)
horizon = 10; % 预测步长
Q = diag([10, 1, 5]); % 状态权重别瞎设!
R = 0.1; % 控制量权重
% 构造约束矩阵(重点!)
A_con = [tril(ones(horizon))]; % 加速度增量约束
b_con = 0.2*ones(horizon,1);
cvx_begin quiet
variable u_opt(horizon)
minimize( norm(Q*(repmat(x0,horizon,1)-ref_trajectory), 2) + R*norm(u_opt,2) )
subject to
A_con*u_opt <= b_con
cvx_end
u = u_opt(1); % 滚动时域取首项
end注意权重矩阵Q里的数值设置——别直接抄论文参数!实际测试发现,当车间距小于15米时,位置权重建议降到5以下,否则会出现"弹簧效应"(后车疯狂震荡)。
多车队列常见报错TOP3:
- S-function初始化失败
检查CarSim DLL文件是否放在工程目录下,实测2018版之后需要额外配置VS_Probe接口
- 数据时间戳不同步
在Simulink的Solver设置里把固定步长改成0.001s,同时CarSim的Simulation Step要设成Exact
- 加速度突变导致失稳
在车辆动力学模型后加个速率限制器,像这样:simulink
Rate Limiter Block:
Rising slew rate: 3 m/s^3
Falling slew rate: -4 m/s^3
这个值对重型车辆要更小
有个特别隐蔽的坑:CarSim 2021之后的版本默认用64位编译,而Matlab可能还在用32位模式跑。遇到"Invalid MEX-file"错误时,试试在Simulink里强制启用64位编译器:
mex -setup:C:\ProgramData\MATLAB\SupportPackages\R2022a\3P.instrset\mingw64.instrset\mexopts\mingw64.xml C++最后提一嘴通信延迟的问题。做五车以上队列时,建议在Controller模块里加个时滞补偿:
% 时滞补偿预测(简版)
function predicted_state = delay_compensation(current_state, tau)
A = [0 1 0; 0 0 1; 0 0 -1/tau];
predicted_state = expm(A*0.05)*current_state; % 假设50ms通信延迟
end这个tau参数建议从0.3开始调试,别直接上论文里的0.1,实测会翻车。
整套模型跑起来后,记得先用手动模式测试跟车——长按方向键↑让前车加速,观察后车响应是否平滑。曾经有个案例因为油门映射范围没校准,导致仿真中车辆莫名倒车...
(需要完整模型文件和支持手册的朋友,看评论区置顶。遇到具体报错截图发我,提供错误代码解析服务)

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)