开发必看,RK3576基于Ubuntu22.04安装ROS2机器人系统方法
ROS(Robot Operating System)和ROS2并非传统意义上的操作系统内核,而是面向机器人开发的开源软件框架,提供节点通信、硬件抽象、算法库、仿真调试等核心能力,降低机器人开发复杂度。ROS2典型的应用场景工业级机器人( 协作机器人、AGV无人车、工业机械臂的实时控制与调度 等)、车载与自动驾驶(路径规划、车辆协同)、嵌入式边缘机器人( 巡检机器人、无人机、水下机器人)等。触觉智
本文介绍基于Ubuntu22.04安装ROS2机器人系统教程,并附带详细测试方法,基于触觉智能RK3576核心板方案,使用配套开发板Purple Pi OH2演示。
ROS、ROS2简介
ROS(Robot Operating System)和ROS2并非传统意义上的操作系统内核,而是面向机器人开发的开源软件框架,提供节点通信、硬件抽象、算法库、仿真调试等核心能力,降低机器人开发复杂度。而ROS2是为解决ROS的工业级痛点而重构的新一代框架,支持 Linux、Windows、macOS及嵌入式RTOS。

-
应用场景
ROS2典型的应用场景工业级机器人( 协作机器人、AGV无人车、工业机械臂的实时控制与调度 等)、车载与自动驾驶(路径规划、车辆协同)、嵌入式边缘机器人( 巡检机器人、无人机 、水下机器人 )等。

-
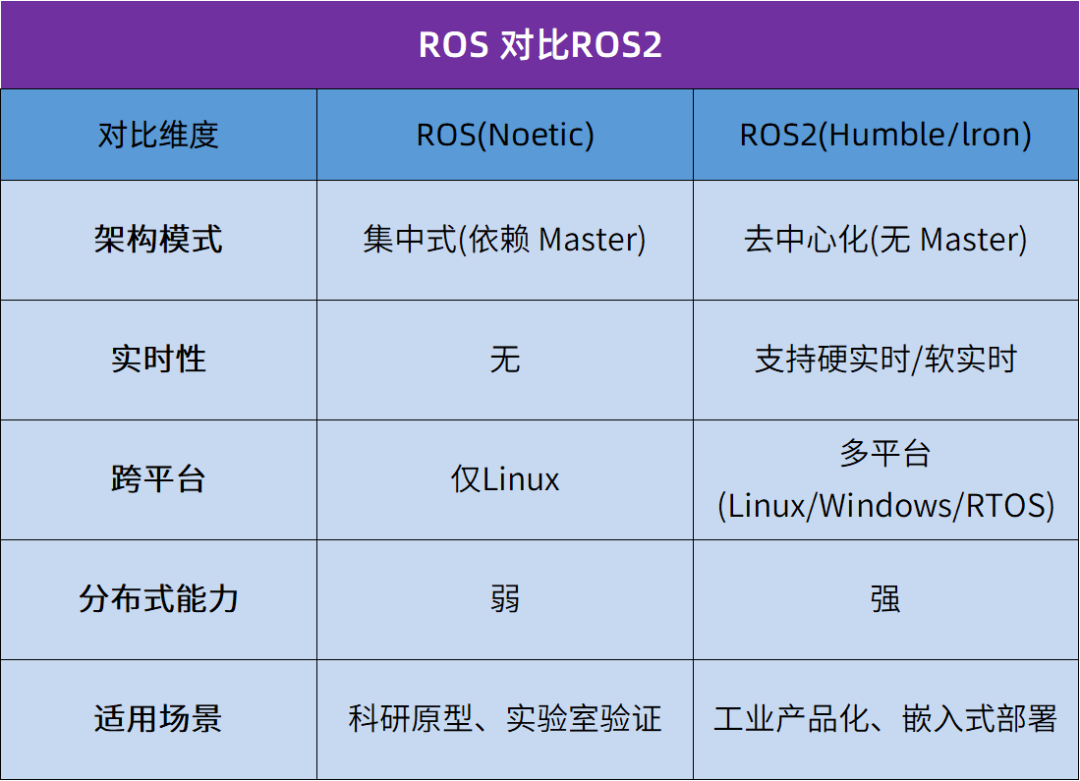
ROS& ROS2对比
ROS2安装
-
环境准备
烧录触觉智能RK3576核心板/开发板网盘资料的Ubuntu22.04系统固件:

触觉智能提供软硬件资料,关注CSDN获取。

完成烧录后,设置 locale本地语言支持 UTF-8,命令如下:
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8启用Universe源:
sudo apt install software-properties-common
sudo add-apt-repository universe添加 ROS2 GPG key
sudo apt update && sudo apt install curl gnupg2 -y
sudo curl -sSL https://gitee.com/tyx6/rosdistro/raw/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg为软件源添加 ROS2 repository,这里选择清华源:
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsin-
安装ROS2
Purple Pi OH2开发板上使用Ubuntu22.04是带桌面的系统,这里安装ROS2也推荐Desktop 版包含: ROS, RViz, demos, tutorials。
sudo apt update && sudo apt upgrade
sudo apt install ros-humble-desktop完成安装后,下篇为大家带来测试方法。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)