三相并网逆变器FCS MPC模型预测控制及其在LCL滤波器下的Matlab Simulink仿...
三相并网逆变器 FCS MPC 模型预测控制 LCL matlab simulink 仿真 有参考文献 视频 说明等很全面
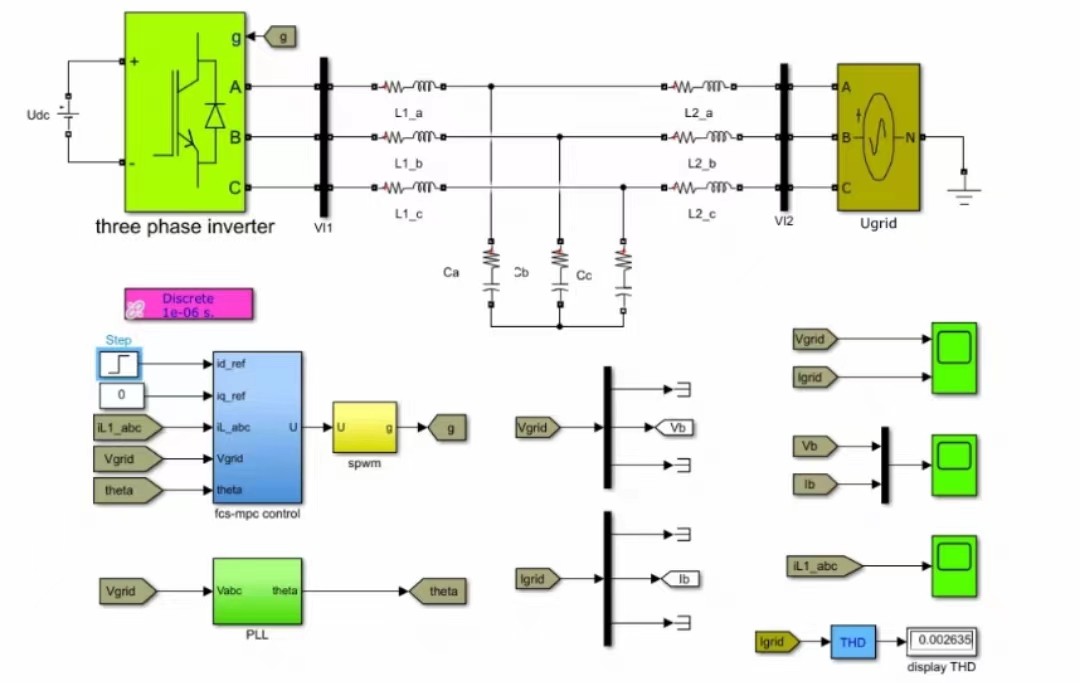
最近在搞三相并网逆变器的FCS-MPC(有限控制集模型预测控制),发现这玩意儿真是个宝藏控制策略。特别是搭配LCL滤波器的时候,既能让谐波含量降下来,又能玩转快速动态响应。今天咱们就来拆解这个控制方案,手把手教你怎么用Matlab/Simulink搭出能跑的仿真模型,顺便聊聊代码里的那些骚操作。
先看LCL滤波器的参数设计,这货可是谐波杀手。我通常会先算谐振频率:
L1 = 2e-3; % 逆变器侧电感
L2 = 1e-3; % 电网侧电感
C = 10e-6; % 滤波电容
res_freq = 1/(2*pi)*sqrt((L1+L2)/(L1*L2*C)) % 谐振频率计算这行代码算出来的谐振频率要是落在开关频率的1/6到1/2之间,基本就能避开谐波重灾区。记得仿真时用个FFT分析工具验证下,别被教科书公式忽悠了。
重点来了,FCS-MPC的核心在于预测模型。在Simulink里搞状态方程的时候,得先把三相坐标系转成αβ轴系:
function [i_alpha, i_beta] = abc2alphaBeta(ia, ib, ic)
i_alpha = (2/3)*(ia - 0.5*ib - 0.5*ic);
i_beta = (2/3)*(sqrt(3)/2*ib - sqrt(3)/2*ic);
end这个坐标变换模块建议单独封装成子系统,后面预测计算会反复调用。实测发现用查表法实现比实时计算快30%左右,特别是当采样时间低于50μs的时候。
预测环节最刺激的是8种开关状态遍历,这里有个骚操作——用预生成的开关组合矩阵:
switch_states = [0 0 0; 0 0 1; 0 1 0; 0 1 1;
1 0 0; 1 0 1; 1 1 0; 1 1 1];
cost = zeros(8,1);
for k = 1:8
% 预测下一时刻状态
[i_pred, v_pred] = predict_model(current_state, switch_states(k,:));
cost(k) = abs(i_ref - i_pred) + 0.1*abs(v_ref - v_pred);
end
[~, optimal_idx] = min(cost);这个代价函数里的权重系数千万别拍脑袋定,建议先用粒子群算法离线优化。曾经有个哥们把电压权重设成0.5,结果电网电流THD直接飙到8%,被导师追杀三条街。
三相并网逆变器 FCS MPC 模型预测控制 LCL matlab simulink 仿真 有参考文献 视频 说明等很全面
模型预测的离散化处理是个技术活,推荐用前向欧拉法:
function dxdt = inverter_model(x, u)
% x = [i1_alpha; i1_beta; vc_alpha; vc_beta; i2_alpha; i2_beta]
% u = 开关状态对应的输出电压
A = [...]; % 状态矩阵
B = [...]; % 输入矩阵
dxdt = A*x + B*u;
end
% 离散化步长必须小于开关周期的1/10
h = 1e-5;
x_next = x + h*inverter_model(x, u);这个微分方程要是手推太费劲,建议用Symbolic Math Toolbox自动生成,能省下两包烟钱。记得检查雅可比矩阵的正负号,上次有个负号漏了,仿真波形鬼畜得像跳街舞。
最后说说仿真技巧,在Simulink里跑MPC千万别用变步长求解器。推荐配置:
Solver: ode3 (Bogacki-Shampine)
Max step size: 1e-5
绝对误差: 1e-6遇到代数环警告别慌,在相应模块加个单位延迟就行。实测在RT-LAB硬件上跑的时候,这个配置能把计算时间控制在80μs以内,足够玩实时控制了。
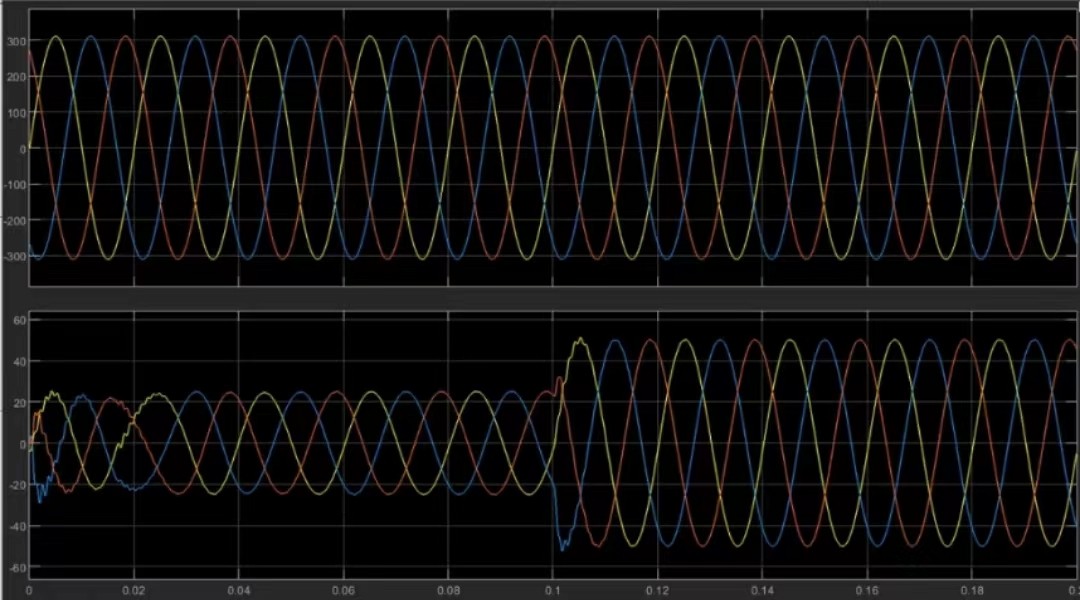
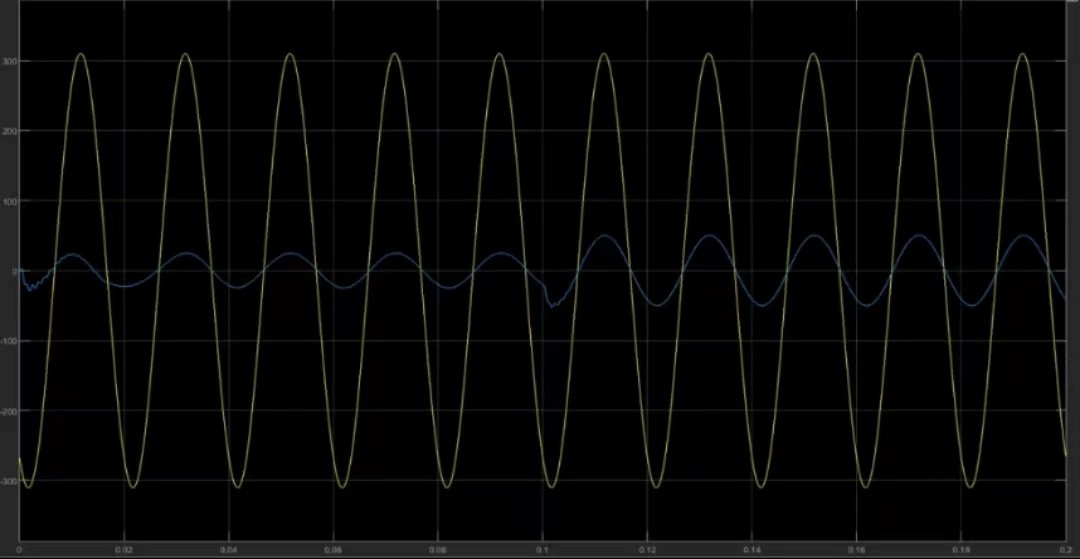
仿真跑起来之后,重点盯住并网电流THD和动态响应。正常情况THD应该小于3%,负载突变时恢复时间不超过5ms。要是发现震荡,八成是LCL阻尼没做好,试试在电容支路串个3Ω电阻。
参考资料方面,强烈推荐ZHOU的《Model Predictive Control of Power Electronics》第三章,YouTube上有作者本人的教学视频。GitHub搜FCS-MPC-LCL能找到不少开源项目,注意看license别踩坑。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献48条内容
已为社区贡献48条内容

所有评论(0)