基于IWR6843毫米波雷达的点云可视化系统
·
实时毫米波雷达数据处理与可视化系统
支持TI IWR6843ISK-ODS雷达的实时信号处理可视化展示、点云聚类以及跌倒检测,代码注释完整,功能齐全。
本项目是在RadarStream基础上新增了3D点云显示、目标轨迹追踪以及跌倒检测三大功能,本项目地址:
Github:基于IWR6843毫米波雷达的点云可视化系统![]() https://github.com/ZHChen2000/iwr6843-points-visual 综合演示:
https://github.com/ZHChen2000/iwr6843-points-visual 综合演示:
基于IWR6843毫米波雷达的点云可视化系统
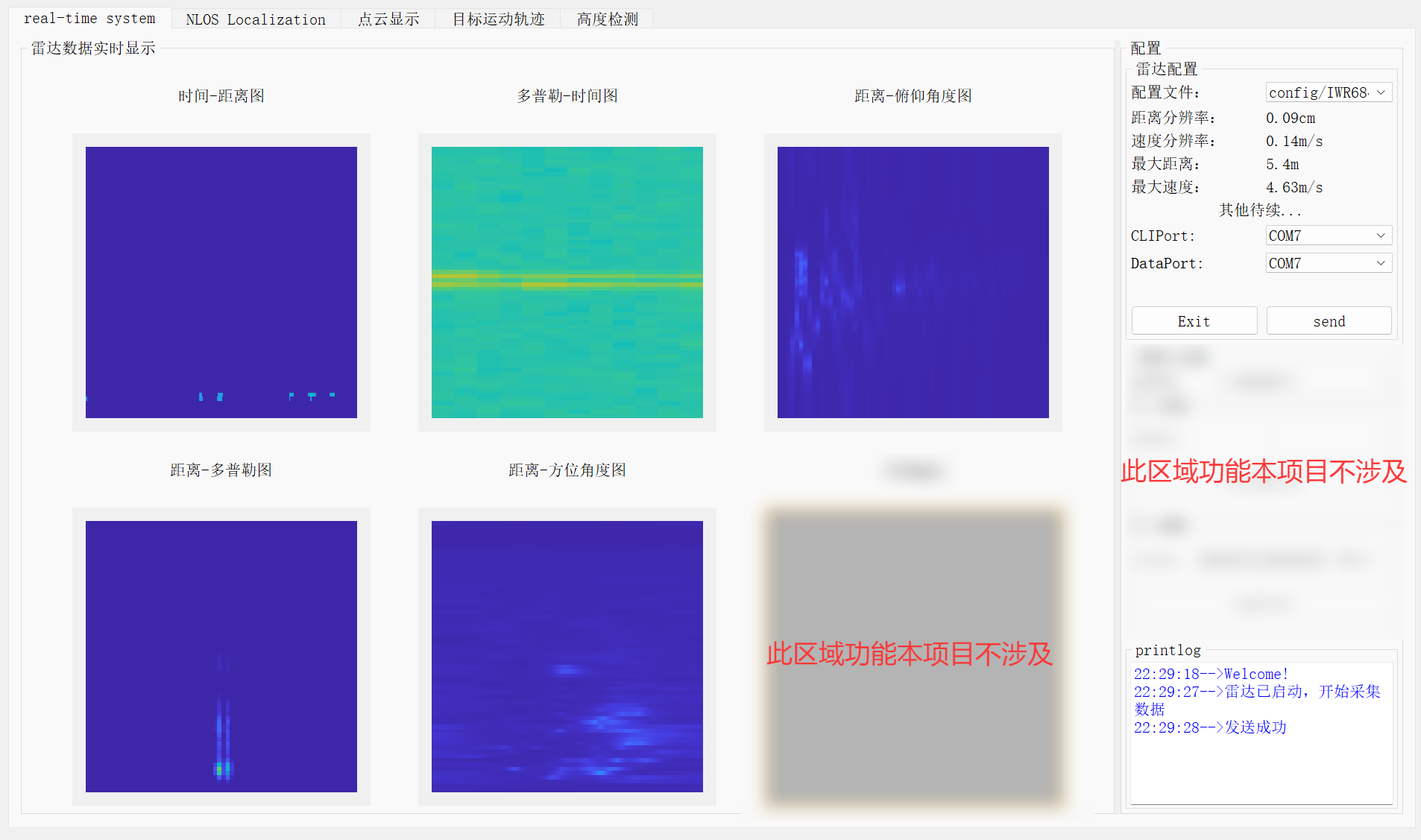
多视图图像显示(RTI、DTI、RDI、RAI、REI):
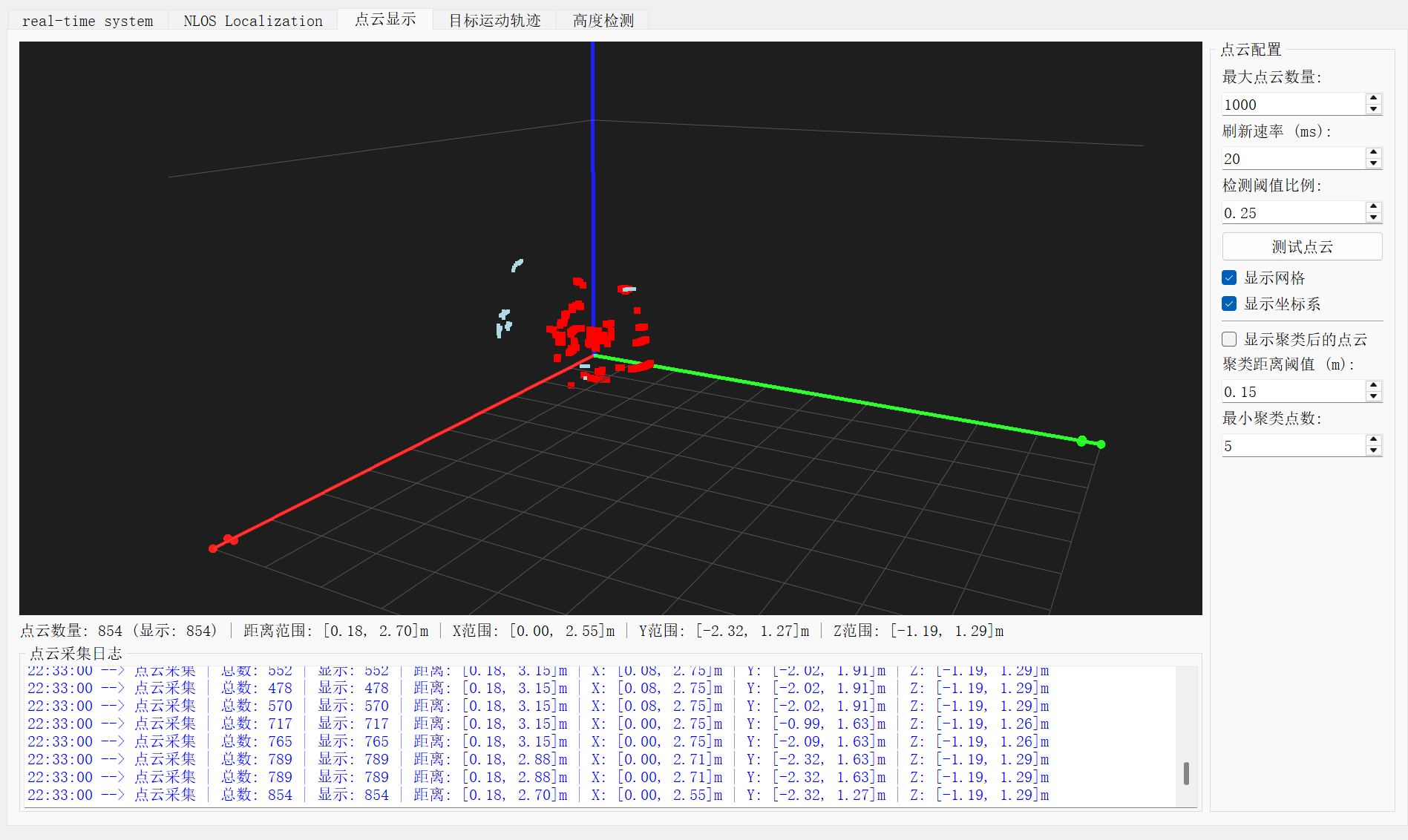
实时3D点云显示:
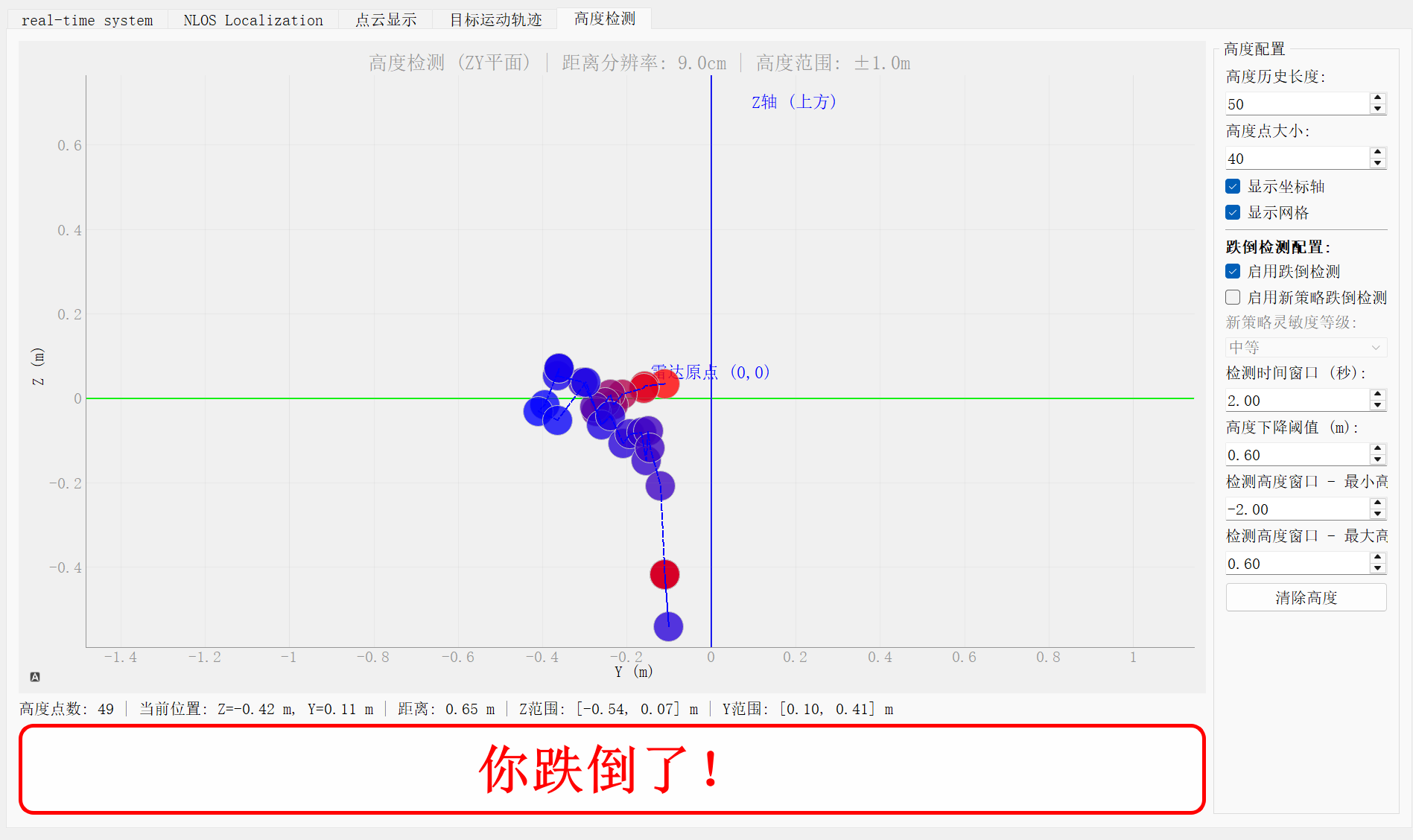
跌倒检测:
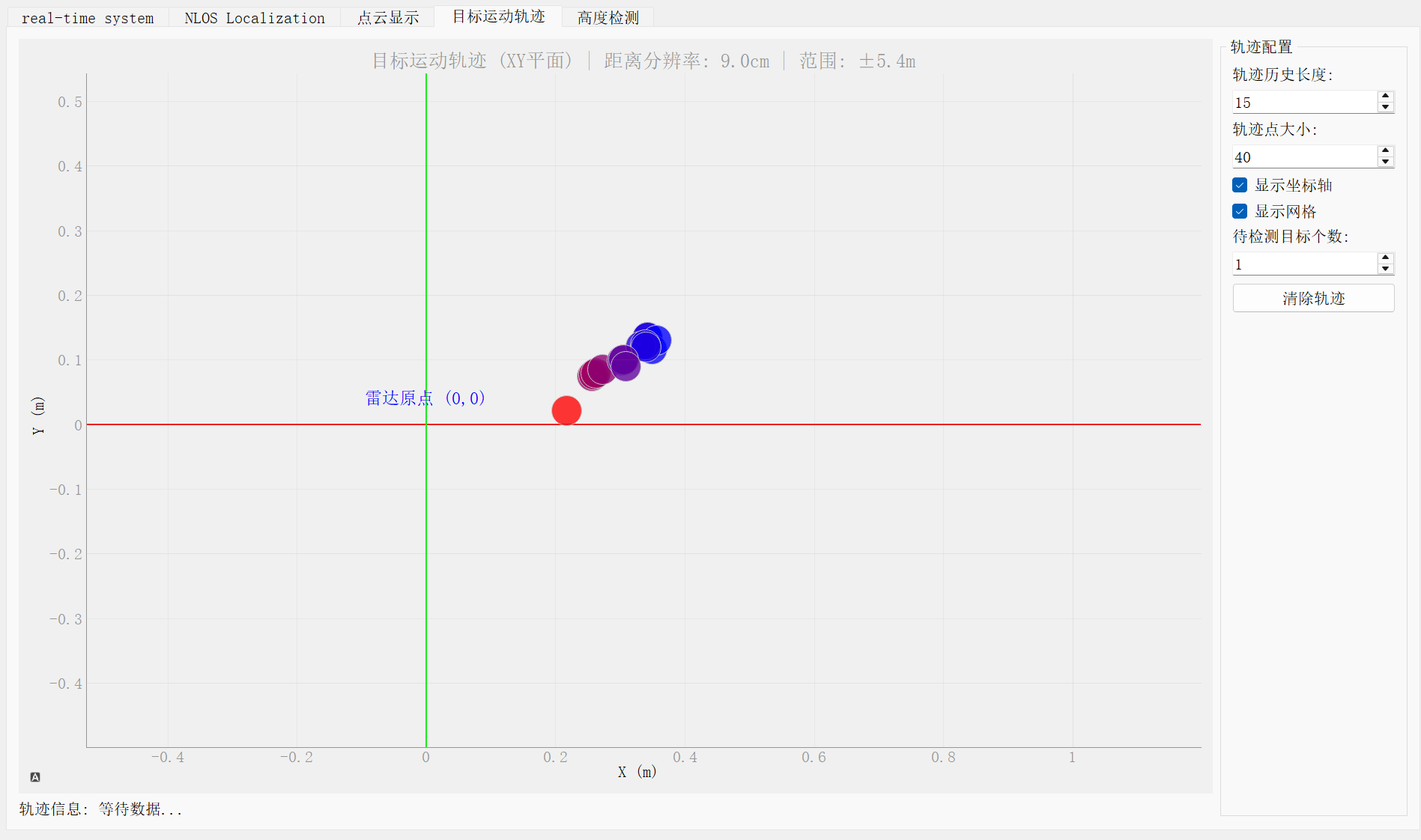
目标轨迹追踪:
项目结构如下:
RadarStream/
├── main.py # 主程序入口
├── UI_interface.py # PyQt5界面定义
├── real_time_process.py # 实时数据处理模块
├── DSP.py # 数字信号处理主模块
├── pointcloud_clustering.py # 点云聚类模块
├── radar_config.py # 雷达配置模块
├── colortrans.py # 颜色转换工具
├── globalvar.py # 全局变量管理
├── requirements.txt # Python依赖列表
├── README.md # 项目说明文档
│
├── config/ # 配置文件目录
│ └── IWR6843_cfg.cfg # IWR6843雷达配置文件
│
├── dsp/ # 信号处理算法模块
│ ├── __init__.py
│ ├── range_processing.py # 距离处理
│ ├── doppler_processing.py # 多普勒处理
│ ├── angle_estimation.py # 角度估计
│ ├── cfar.py # CFAR检测
│ ├── compensation.py # 杂波抑制
│ ├── music.py # MUSIC算法
│ ├── noise_removal.py # 噪声去除
│ ├── utils.py # 工具函数
│ └── ZoomFFT.py # Zoom FFT
│
├── firmware/ # 雷达固件文件
│ ├── xwr1843_mmw_demo.bin
│ ├── xwr6443_mmw_demo.bin
│ ├── xwr6843AOP_mmw_demo.bin
│ ├── xwr6843ISK_mmw_demo.bin
│ └── xwr6843ODS_mmw_demo.bin
│
├── libs/ # 第三方库文件
│ ├── UDPCAPTUREADCRAWDATA.dll # UDP数据捕获DLL
│ ├── UDPCAPTUREADCRAWDATA.lib
│ └── libtest.so
│
├── iwr6843_tlv/ # TLV数据解析模块
└── detected_points.py 注:本项目是在RadarStream项目基础上新增了3D点云可视化、跌倒检测以及目标跟踪、定位等功能。感谢原作者Tkwer的开源项目RadarStream,原项目地址:Github:Tkwer/RadarStream![]() https://github.com/Tkwer/RadarStream 有关本项目的详细信息可以前往Github中进一步了解。Github:基于IWR6843毫米波雷达的点云可视化系统
https://github.com/Tkwer/RadarStream 有关本项目的详细信息可以前往Github中进一步了解。Github:基于IWR6843毫米波雷达的点云可视化系统![]() https://github.com/ZHChen2000/iwr6843-points-visual
https://github.com/ZHChen2000/iwr6843-points-visual

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)