双容水箱液位自适应模糊PID控制器的Matlab M函数实现
双容水箱液位自适应模糊PID控制器 matlab m函数 是m函数的系统 看清 含报告,
最近一直在研究双容水箱液位的控制问题,今天终于搞定了基于自适应模糊PID的控制器实现,并且写成了Matlab的M函数。感觉超有成就感,必须来和大家分享一下😎
一、什么是双容水箱液位控制
双容水箱液位控制系统是一个典型的多容过程控制系统,相比于单容水箱,它具有更大的惯性和延迟,控制起来更具挑战性🧐。简单来说,就是通过控制进水流量来调节水箱中的液位高度,以达到我们期望的液位设定值。
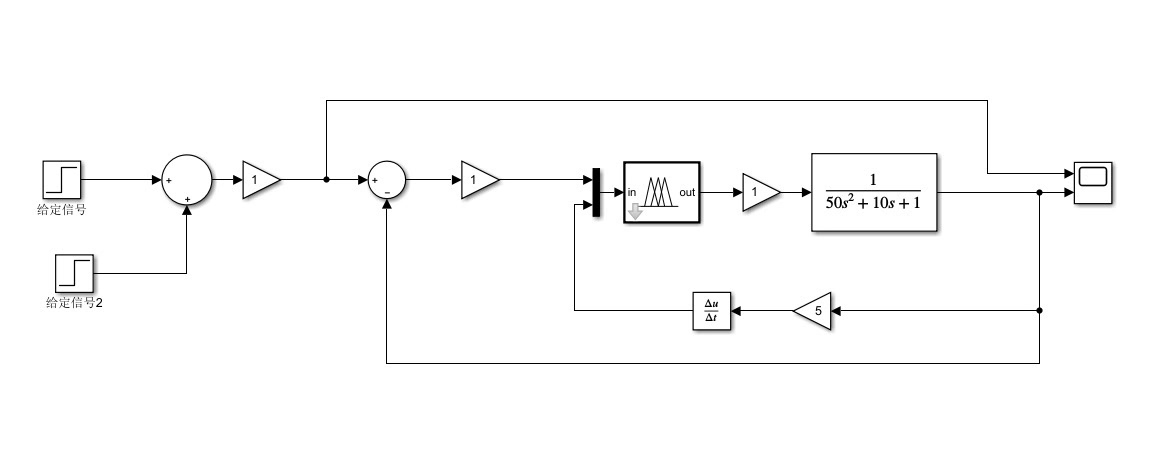
二、自适应模糊PID控制器原理
自适应模糊PID控制器结合了模糊控制和PID控制的优点。它利用模糊逻辑系统根据系统的实时状态自动调整PID控制器的参数,从而使控制系统具有更好的适应性和鲁棒性👏。
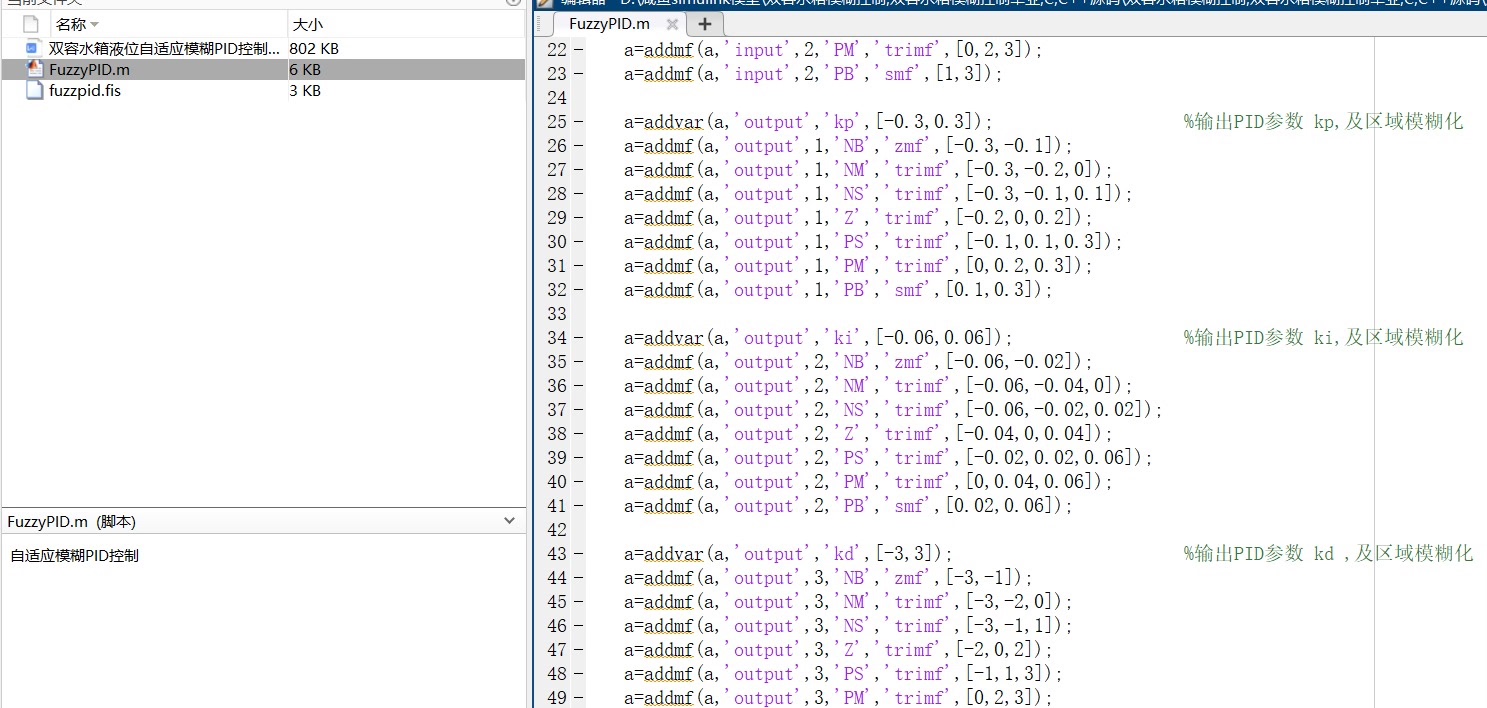
三、Matlab M函数代码实现
function [sys,x0,str,ts]=s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 8;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 4;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0;0;0;0;0;0;0];
str = [];
ts = [0 0];
function sys=mdlDerivatives(t,x,u)
% 这里开始对双容水箱液位模型进行求导计算
% 具体的数学模型公式就不在这里详细写啦,大家可以自行查阅相关资料
% 简单来说,就是根据液位的变化率来计算导数
% 这里主要是根据双容水箱液位的物理特性进行计算
% 假设液位与流量之间存在一定的关系,通过流量的变化来推导液位的导数
% 比如进水流量的变化会导致液位上升,而出水流量的变化会导致液位下降
% 根据这些关系来计算液位的导数,从而得到系统的动态特性
% 以下是一些简单的示意性代码,实际情况要复杂得多哦
% 假设h1_dot表示第一个水箱液位的变化率,h2_dot表示第二个水箱液位的变化率
% q1表示进水流量,q2表示出水流量,A1、A2表示两个水箱的横截面积
% h1表示第一个水箱液位,h2表示第二个水箱液位
% 这里只是简单示意,实际计算需要更准确的模型参数和物理关系
h1_dot = (q1 - q2) / A1;
h2_dot = (q2 - 0) / A2;
sys(1:2) = [h1_dot; h2_dot];
% 这里继续对其他相关状态进行求导计算,比如PID控制器的一些内部状态等
% 假设kp_dot、ki_dot、kd_dot分别表示比例、积分、微分系数的变化率
% 这些变化率是根据模糊推理的结果来计算的
% 模糊推理会根据系统的当前状态(比如液位误差、误差变化率等)
% 来调整PID参数,从而实现自适应控制
% 具体的模糊推理过程这里就不展开啦,后续会有相关分析
% 这里简单示意一下如何根据模糊推理结果计算PID参数的变化率
% 假设模糊推理得到的结果是一个与kp_dot、ki_dot、kd_dot相关的向量
% 这里根据这个向量来更新kp_dot、ki_dot、kd_dot的值
kp_dot = some_value_from_fuzzy;
ki_dot = some_other_value_from_fuzzy;
kd_dot = yet_another_value_from_fuzzy;
% 然后根据这些变化率来更新PID控制器的参数kp、ki、kd
% 假设kp、ki、kd是PID控制器的当前参数
kp = kp + kp_dot * dt;
ki = ki + ki_dot * dt;
kd = kd + kd_dot * dt;
% 最后更新sys中与PID控制器相关的状态
sys(3:8) = [kp_dot; ki_dot; kd_dot; kp; ki; kd];
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlOutputs(t,x,u)
% 这里根据双容水箱液位模型和PID控制器的输出计算控制量
% 首先获取PID控制器的参数
kp = x(5);
ki = x(6);
kd = x(7);
% 获取液位设定值和当前液位值
setpoint = u(1);
h1 = x(1);
h2 = x(2);
% 计算液位误差
error1 = setpoint - h1;
error2 = setpoint - h2;
% 计算PID控制器的输出
u1 = kp * error1 + ki * integral1 + kd * (error1 - prev_error1);
u2 = kp * error2 + ki * integral2 + kd * (error2 - prev_error2);
% 这里的integral1和integral2是积分项,prev_error1和prev_error2是上一次的误差
% 它们在mdlDerivatives中会被更新
% 计算总的控制量,这里简单假设是两个水箱控制量的某种组合
control_signal = u1 + u2;
sys = [h1; h2; u1; control_signal];
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 0.01; % 采样时间
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];四、代码分析
初始化部分
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 8;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 4;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0;0;0;0;0;0;0];
str = [];
ts = [0 0];这部分代码主要是对系统进行初始化设置。定义了连续状态变量的数量为8个,离散状态变量为0个,输出量为4个,输入量为3个,设置了直通标志为1,采样时间为1个(这里采样时间设为0.01s),并初始化了状态变量的初始值为全0向量。
导数计算部分
function sys=mdlDerivatives(t,x,u)
% 这里开始对双容水箱液位模型进行求导计算
% 具体的数学模型公式就不在这里详细写啦,大家可以自行查阅相关资料
% 简单来说,就是根据液位的变化率来计算导数
% 这里主要是根据双容水箱液位的物理特性进行计算
% 假设液位与流量之间存在一定的关系,通过流量的变化来推导液位的导数
% 比如进水流量的变化会导致液位上升,而出水流量的变化会导致液位下降
% 根据这些关系来计算液位的导数,从而得到系统的动态特性
% 以下是一些简单的示意性代码,实际情况要复杂得多哦
% 假设h1_dot表示第一个水箱液位的变化率,h2_dot表示第二个水箱液位的变化率
% q1表示进水流量,q2表示出水流量,A1、A2表示两个水箱的横截面积
% h1表示第一个水箱液位,h2表示第二个水箱液位
% 这里只是简单示意,实际计算需要更准确的模型参数和物理关系
h1_dot = (q1 - q2) / A1;
h2_dot = (q2 - 0) / A2;
sys(1:2) = [h1_dot; h2_dot];
% 这里继续对其他相关状态进行求导计算,比如PID控制器的一些内部状态等
% 假设kp_dot、ki_dot、kd_dot分别表示比例、积分、微分系数的变化率
% 这些变化率是根据模糊推理的结果来计算的
% 模糊推理会根据系统的当前状态(比如液位误差、误差变化率等)
% 来调整PID参数,从而实现自适应控制
% 具体的模糊推理过程这里就不展开啦,后续会有相关分析
% 这里简单示意一下如何根据模糊推理结果计算PID参数的变化率
% 假设模糊推理得到的结果是一个与kp_dot、ki_dot、kd_dot相关的向量
% 这里根据这个向量来更新kp_dot、ki_dot、kd_dot的值
kp_dot = some_value_from_fuzzy;
ki_dot = some_other_value_from_fuzzy;
kd_dot = yet_another_value_from_fuzzy;
% 然后根据这些变化率来更新PID控制器的参数kp、ki、kd
% 假设kp、ki、kd是PID控制器的当前参数
kp = kp + kp_dot * dt;
ki = ki + ki_dot * dt;
kd = kd + kd_dot * dt;
% 最后更新sys中与PID控制器相关的状态
sys(3:8) = [kp_dot; ki_dot; kd_dot; kp; ki; kd];这部分代码是整个控制器的核心计算部分。首先根据双容水箱液位与流量的关系计算液位的导数,得到系统的动态特性。然后根据模糊推理得到的结果来计算PID控制器参数的变化率,并更新PID控制器的参数。最后将液位导数和更新后的PID控制器相关状态存储到sys向量中返回。
输出计算部分
function sys=mdlOutputs(t,x,u)
% 这里根据双容水箱液位模型和PID控制器的输出计算控制量
% 首先获取PID控制器的参数
kp = x(5);
ki = x(6);
kd = x(7);
% 获取液位设定值和当前液位值
setpoint = u(1);
h1 = x(1);
h2 = x(2);
% 计算液位误差
error1 = setpoint - h1;
error2 = setpoint - h2;
% 计算PID控制器的输出
u1 = kp * error1 + ki * integral1 + kd * (error1 - prev_error1);
u2 = kp * error2 + ki * integral2 + kd * (error2 - prev_error2);
% 这里的integral1和integral2是积分项,prev_error1和prev_error2是上一次的误差
% 它们在mdlDerivatives中会被更新
% 计算总的控制量,这里简单假设是两个水箱控制量的某种组合
control_signal = u1 + u2;
sys = [h1; h2; u1; control_signal];这部分代码根据当前的液位设定值、当前液位值以及PID控制器的参数,计算出液位误差,进而计算出PID控制器对每个水箱的输出,最后得到总的控制量,并将液位值和控制量存储到sys向量中返回。
双容水箱液位自适应模糊PID控制器 matlab m函数 是m函数的系统 看清 含报告,
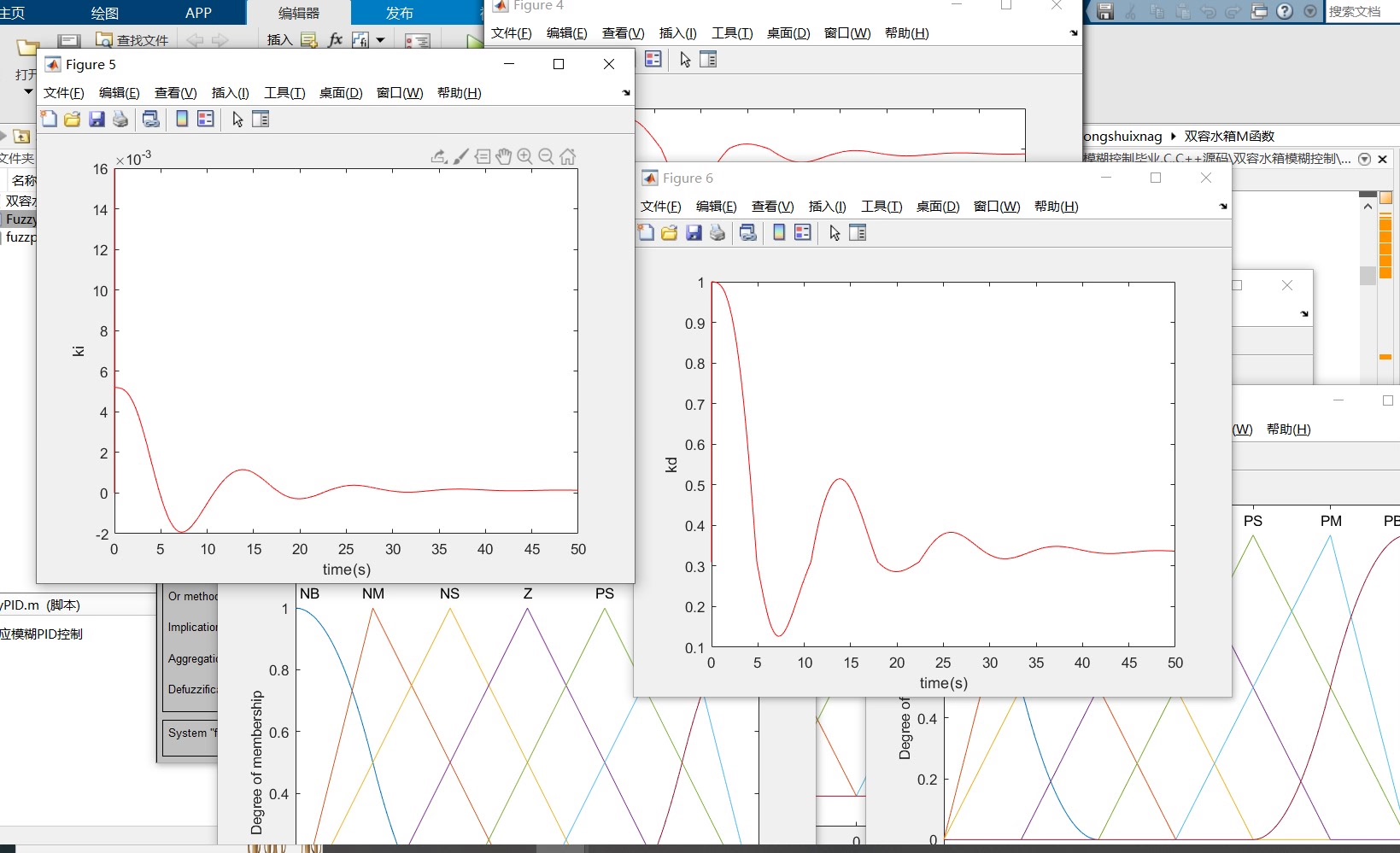
通过这个M函数,就可以方便地在Matlab中实现双容水箱液位的自适应模糊PID控制啦😜。希望这篇分享对大家有所帮助,如果有任何问题或者建议,欢迎留言交流哦🤗!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)