26# 西门子S7 - 200、三菱PLC与MCGS搬运机械手控制系统探索
26#西门子S7-200三菱PLC和MCGS搬运机械手控制系统
在自动化控制领域,搬运机械手控制系统结合不同品牌的PLC(可编程逻辑控制器)与MCGS(昆仑通态)组态软件,能实现高效、精准的物料搬运。今天就来聊聊26# 西门子S7 - 200、三菱PLC在这方面与MCGS的应用。
西门子S7 - 200与MCGS的协作
西门子S7 - 200以其可靠性和强大的指令集在工业控制中广泛应用。对于搬运机械手控制系统,我们首先要对S7 - 200进行编程。
比如,使用梯形图语言来控制机械手的动作。假设我们要控制机械手的上升动作,代码可能如下:
Network 1:
LD I0.0 // 假设I0.0是上升按钮输入信号
= Q0.0 // Q0.0控制机械手上升的输出分析这段代码,LD指令是装载指令,将I0.0(上升按钮)的状态装载到逻辑堆栈中。然后“=”指令将逻辑堆栈的结果赋值给Q0.0,从而控制机械手上升。
在与MCGS结合时,我们要在MCGS中建立与S7 - 200的通信连接。在MCGS组态环境中,通过设备窗口添加西门子S7 - 200的驱动,设置好通信参数,如端口号、站号等。这样就可以在MCGS界面上实时监控和控制机械手的状态。例如,在MCGS界面上创建一个按钮,关联到S7 - 200中的I0.0变量,就能实现远程控制机械手上升。
三菱PLC与MCGS的搭配
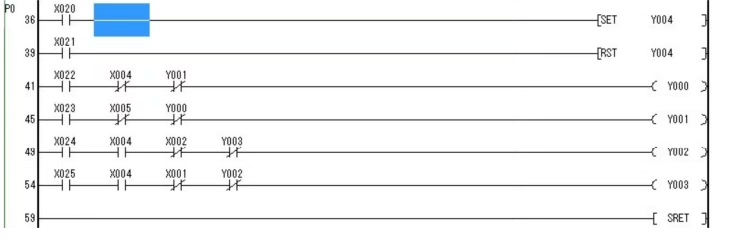
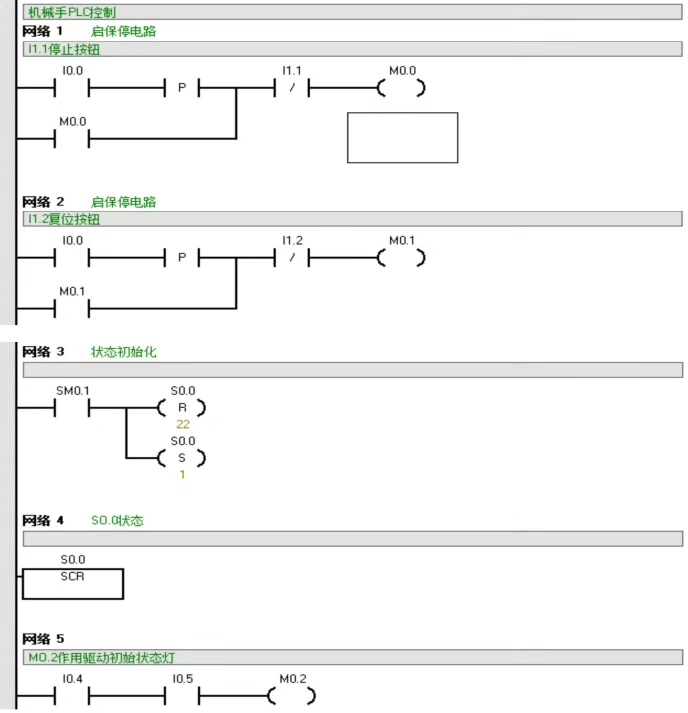
三菱PLC同样在自动化领域占据重要地位。以三菱FX系列为例,控制机械手下降动作的代码如下(采用基本指令):
LD X0 // X0假设为下降按钮输入
OUT Y0 // Y0控制机械手下降输出这里LD指令与西门子的类似,也是读取输入信号状态,OUT指令则是将结果输出到Y0,控制机械手下降。
26#西门子S7-200三菱PLC和MCGS搬运机械手控制系统
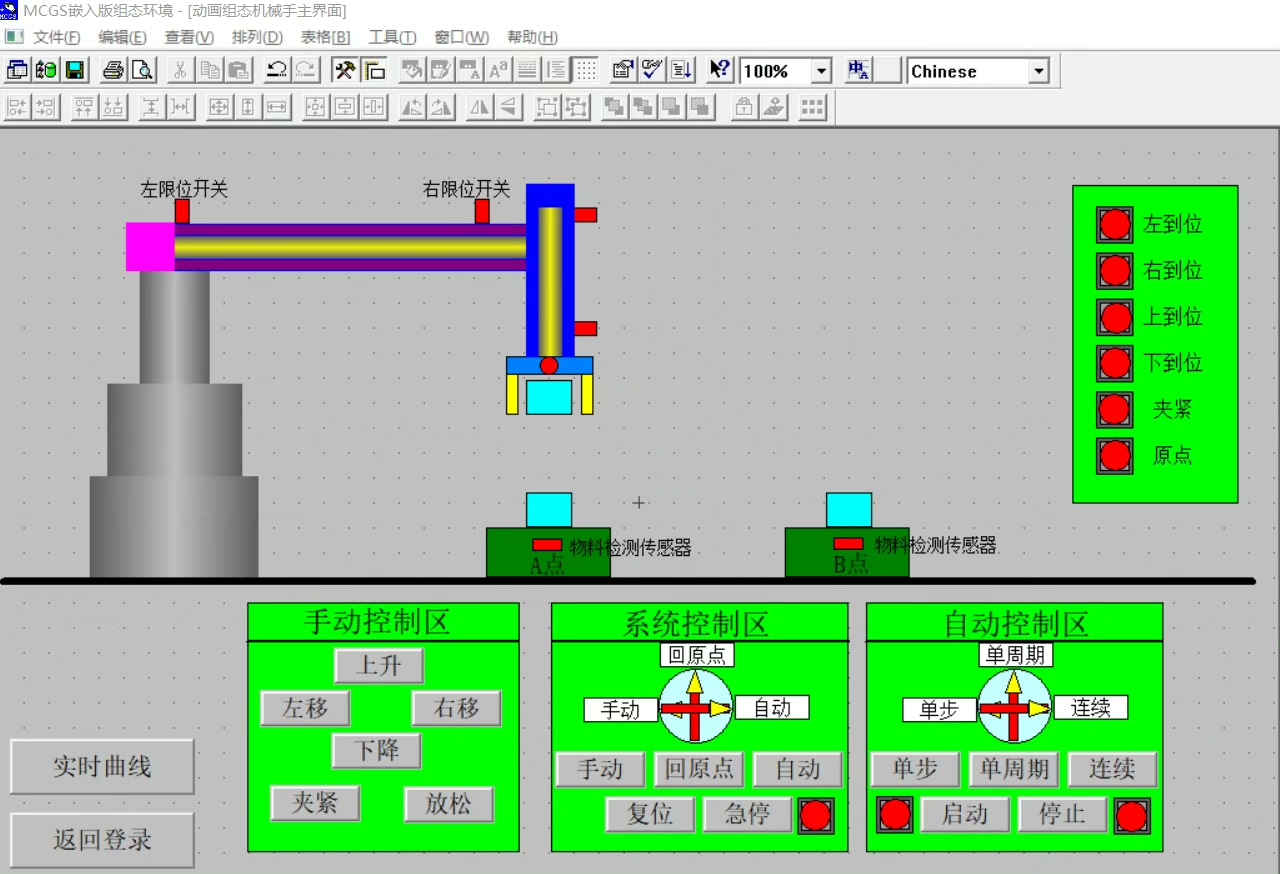
三菱PLC与MCGS通信,在MCGS设备窗口添加三菱PLC对应的驱动,同样设置好通信参数。在MCGS画面上可以设计更直观的操作界面,比如动画显示机械手的下降动作,同时实时显示相关传感器反馈的数据,如机械手当前位置等。
MCGS在整个系统中的核心作用
MCGS作为人机交互界面软件,将PLC采集和控制的数据以直观易懂的方式呈现给操作人员。它不仅可以实现按钮控制、状态显示,还能进行数据记录和报警处理。
比如,我们可以在MCGS中设置报警策略。当机械手运行速度超过设定值时,MCGS会弹出报警窗口,并记录报警时间和相关数据。代码实现报警功能在MCGS脚本语言中类似如下:
If 机械手速度 > 设定速度 Then
Alarm("机械手超速报警")
RecordData("报警记录", 机械手速度, 时间)
End If这段代码通过判断机械手速度是否超过设定值,若超过则触发报警并记录相关数据。
总之,无论是西门子S7 - 200还是三菱PLC与MCGS结合,都能打造出功能强大的搬运机械手控制系统,满足不同工业场景下的自动化搬运需求。在实际应用中,根据具体项目需求和预算选择合适的组合,能有效提升生产效率和质量。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 14
14 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)