PPT版式韵律,opencv课程知识点总结
图像/视频的读取、显示、保存基础API( cv2.imread() / cv2.imshow() / cv2.imwrite() )- Shi-Tomasi角点检测( cv2.goodFeaturesToTrack() ):改进版Harris,适合跟踪。-cv2.BFMatcher() / cv2.FlannBasedMatcher() :特征匹配。-cv2.warpPerspective() :
PPT版式韵律 核心知识点总结
一、什么是版式韵律
- 让页面有节奏、有秩序、不杂乱,视觉流动自然舒服。
- 本质:重复、对齐、对比、留白的规律运用。
二、四大韵律原则
1. 对齐(统一秩序)
- 统一左对齐/居中对齐/右对齐,不随意乱放。
- 标题、正文、图片共用一条隐形参考线。
2. 重复(强化统一)
- 字体、颜色、图标、间距、边框全程一致。
- 相同层级内容用相同样式,形成节奏感。
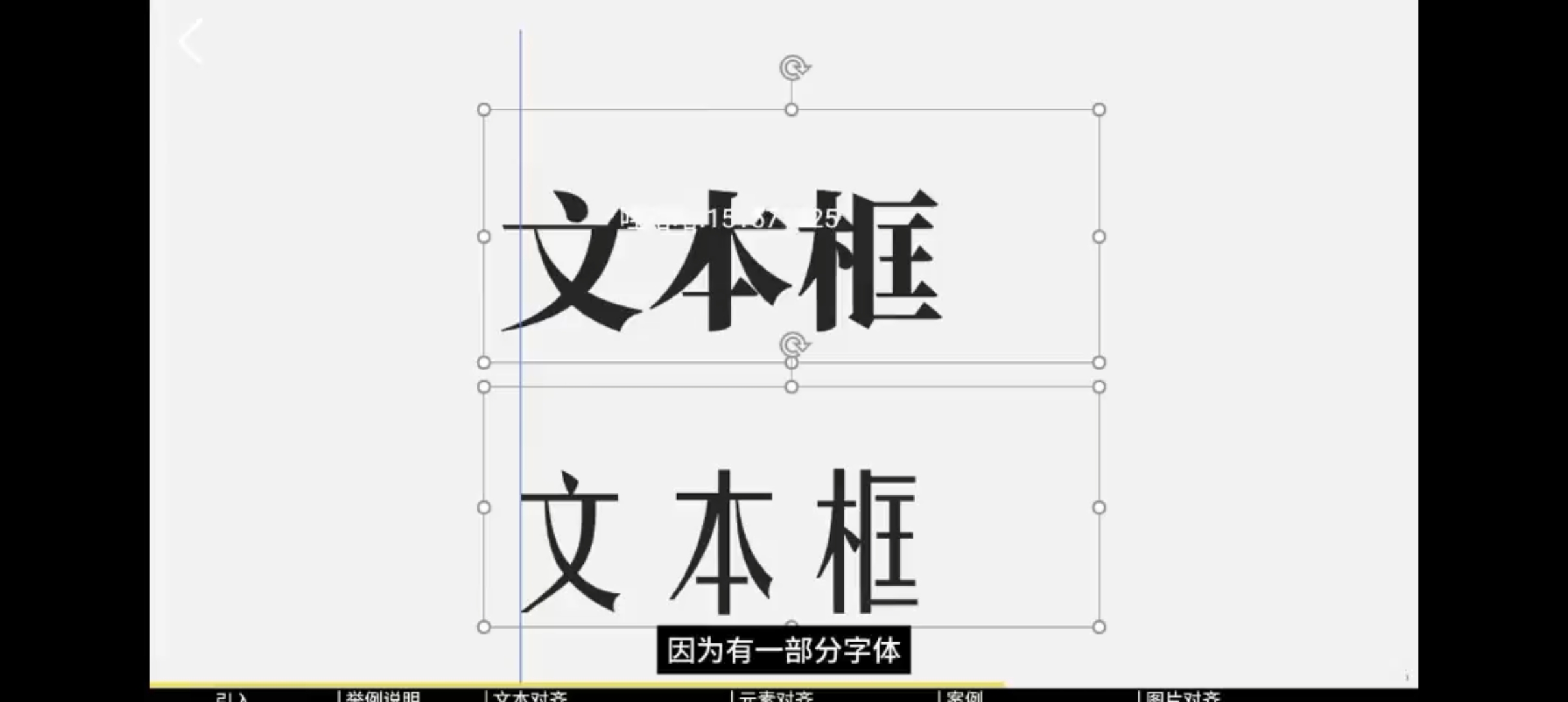
3. 对比(突出重点)
- 大小、粗细、颜色、疏密形成强弱对比。
- 一页只突出1个核心信息。
4. 留白(呼吸感)
- 四周留空,不塞满、不拥挤。
- 段落、模块之间留间距,让视线“歇一下”。
三、常见韵律手法
- 渐变韵律:大小/颜色/位置逐步变化。
- 重复韵律:相同元素规律出现(如项目符号、图标)。
- 对称韵律:左右/上下对称,稳重正式。
- 节奏留白:密—疏—密—疏,形成阅读节奏。
四、实用排版
- 一行只放一个重点。
- 字体不超过3种。
- 颜色不超过3色。
- 间距统一、均匀。
- 每页只讲一件事。
五、要点
- 不要忽大忽小、忽左忽右。
- 不要满屏文字、无留白。
- 不要样式混乱、层级不清。
相关笔记
OpenCV 课程知识点整理(课时30-39 + 课时2)
课时2 Notebook和IDE环境搭建知识点
1. 开发环境配置
- Python环境搭建(Anaconda/Miniconda)、虚拟环境管理
- OpenCV-Python库安装( pip install opencv-python )
- Jupyter Notebook / PyCharm等IDE的配置与使用
2. 基础开发流程
- 图像/视频的读取、显示、保存基础API( cv2.imread() / cv2.imshow() / cv2.imwrite() )
- 代码调试、项目结构搭建
3. 学习目标:为后续所有OpenCV实战项目搭建可运行的开发环境,掌握基础代码编写规范
课时30:原始与变换公式 透视变换结果知识点
1. 图像变换基础
- 仿射变换 vs 透视变换的区别:仿射变换保持平行性,透视变换可矫正任意视角畸变
- 变换矩阵原理:3×3透视变换矩阵的数学推导
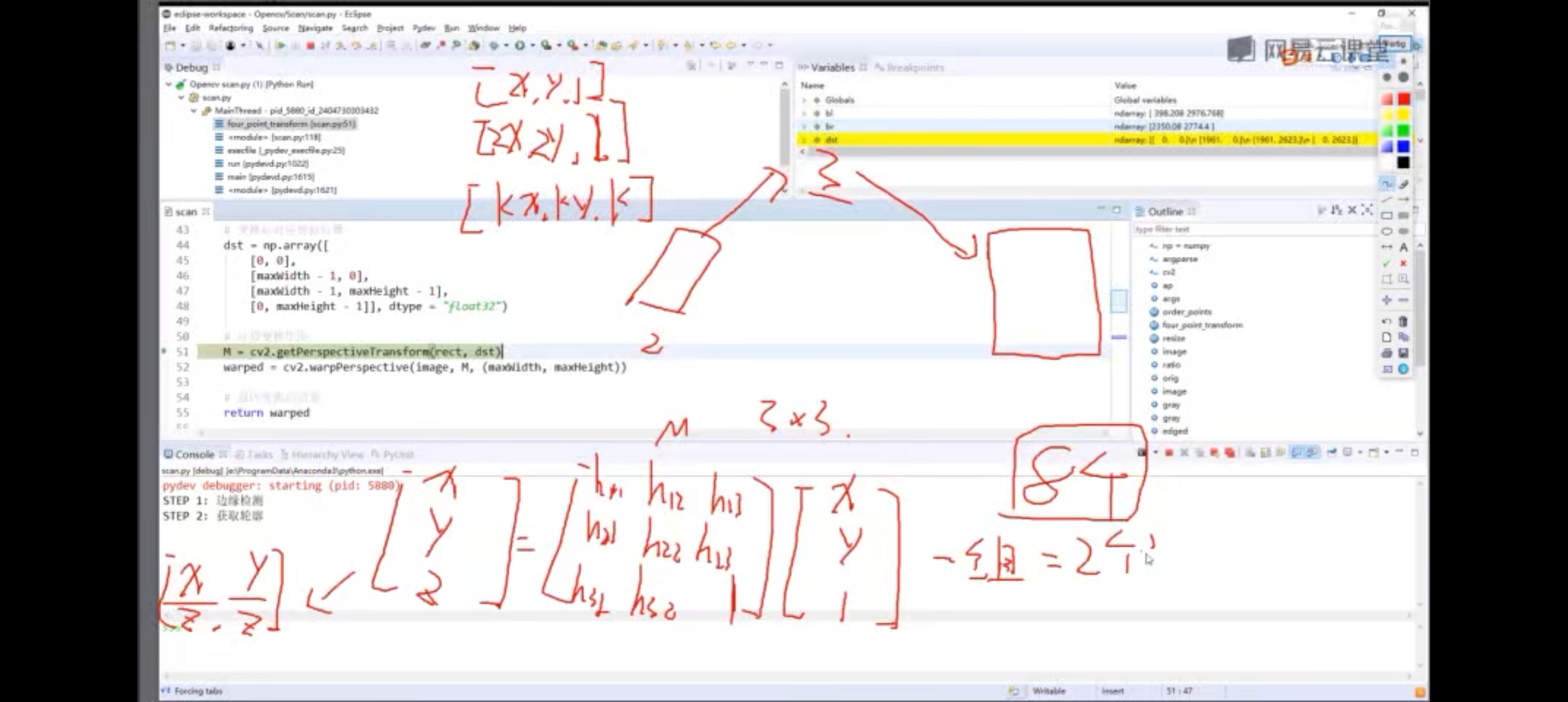
2. OpenCV实现
- cv2.getPerspectiveTransform() :根据4个对应点计算变换矩阵
- cv2.warpPerspective() :执行透视变换,生成矫正后的图像
3. 应用场景:文档扫描、答题卡矫正、车牌识别、视角矫正
4. 关键步骤:轮廓检测 → 提取四边形顶点 → 计算变换矩阵 → 执行透视变换
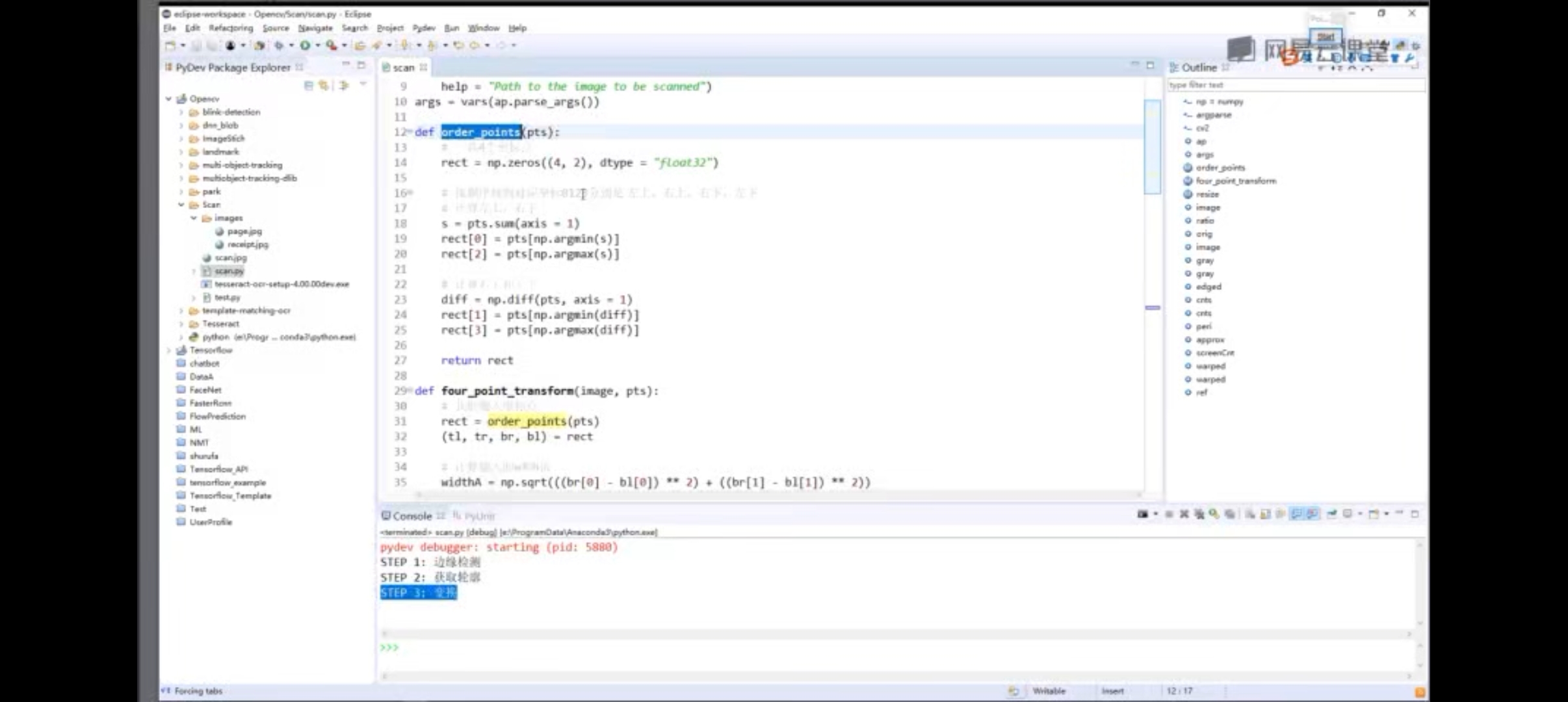
课时31:文档扫描结果知识点
1. 完整文档扫描流程
- 图像预处理:灰度化、高斯模糊、边缘检测(Canny)
- 轮廓提取: cv2.findContours() 提取文档外轮廓
- 顶点排序:对轮廓点进行排序,确定文档的四个角点
- 透视变换:矫正文档为正视图
- 后处理:二值化、去噪、增强对比度,生成清晰扫描件
2. 实战优化
- 解决复杂背景、光照不均、边缘模糊的问题
- 批量文档扫描的自动化实现
3. 技术延伸:可扩展为OCR文字识别的前置预处理步骤
课时32:角点检测和基本数学原理知识点
1. 角点的数学定义
- 角点(特征点):图像中梯度变化剧烈的点,是图像的关键特征
- 角点检测的核心思想:局部窗口在各个方向移动时,灰度值均发生显著变化
2. 经典算法原理
- Harris角点检测:基于自相关矩阵、特征值分析的角点检测算法
- 算法公式推导、响应函数计算、阈值筛选
3. OpenCV实现
- cv2.cornerHarris() :Harris角点检测API
- 角点可视化、参数调优(block size、k值等)
4. 应用场景:图像拼接、目标跟踪、三维重建
课时33:求解化简和特征归属划分知识点
1. 特征匹配基础
- 特征描述子:用于描述角点/特征点邻域信息的向量
- 特征匹配的核心:通过描述子的相似度(如欧式距离)匹配不同图像中的对应特征点
2. 数学原理
- 最小二乘法求解变换矩阵(RANSAC算法剔除误匹配)
- 特征归属划分:将匹配点划分为内点(正确匹配)和外点(错误匹配)
3. OpenCV实现
- cv2.RANSAC() :随机抽样一致性算法,优化匹配结果
- 单应性矩阵(Homography)计算,用于图像间的空间变换
4. 应用场景:图像拼接、目标识别、增强现实(AR)
课时34:OpenCV角点检测效果知识点
1. 多种角点检测算法对比
- Harris角点检测:经典算法,适合简单场景
- Shi-Tomasi角点检测( cv2.goodFeaturesToTrack() ):改进版Harris,适合跟踪
- FAST角点检测:高速算法,适合实时场景
- ORB特征检测:结合FAST角点检测和BRIEF描述子,适合实时特征匹配
2. 效果对比与参数调优
- 不同算法的优缺点、适用场景
- 阈值、角点数量、邻域大小等参数对检测效果的影响
3. 实战应用:在实际图像/视频中进行角点检测,验证算法效果
课时35:图像特征-sift知识点
1. SIFT算法原理
- SIFT(尺度不变特征变换):经典的局部特征检测算法,具有尺度、旋转、光照不变性
- 核心步骤:尺度空间构建 → 极值点检测 → 关键点定位 → 方向分配 → 特征描述子生成
2. OpenCV实现
- cv2.SIFT_create() :SIFT特征检测器
- sift.detectAndCompute() :检测特征点并计算描述子
- cv2.BFMatcher() / cv2.FlannBasedMatcher() :特征匹配
3. 算法优势
- 尺度不变性:可检测不同缩放比例的目标
- 旋转不变性:可检测不同旋转角度的目标
- 抗噪性强,适合复杂场景
4. 应用场景:图像拼接、目标识别、全景图生成、三维
课时36:全景图像拼接知识点
1. 全景拼接完整流程
- 图像采集:多张重叠视角的图像
- 特征提取与匹配:SIFT/ORB算法提取特征点,匹配对应点
- 单应性矩阵计算:RANSAC算法优化匹配,计算图像间的变换关系
- 图像融合:将多张图像融合为一张全景图(加权融合、多波段融合)
- 后处理:裁剪黑边、增强对比度
2. OpenCV实现
- cv2.Stitcher_create() :OpenCV内置的全景拼接API
- 手动实现拼接的完整代码流程
3. 实战优化
- 解决拼接错位、重影、曝光不均的问题
- 大场景全景图的拼接技巧
4. 应用场景:航拍全景、街景地图、VR全景、文物数字化
课时37:停车场车位识别知识点
1. 车位识别基础流程
- 图像预处理:灰度化、去噪、边缘检测、形态学操作
- 车位区域提取:通过轮廓检测、霍夫变换提取车位线
- 车位定位:划分每个车位的ROI(感兴趣区域)
- 空车位检测:通过纹理、边缘、颜色特征判断车位是否空闲
2. OpenCV实现
- cv2.HoughLinesP() :霍夫直线检测,提取车位线
- 轮廓检测、轮廓筛选,提取车位轮廓
- 车位编号、可视化标注
3. 应用场景:停车场智能管理、车位引导系统
课时38:停车场车位识别2知识点
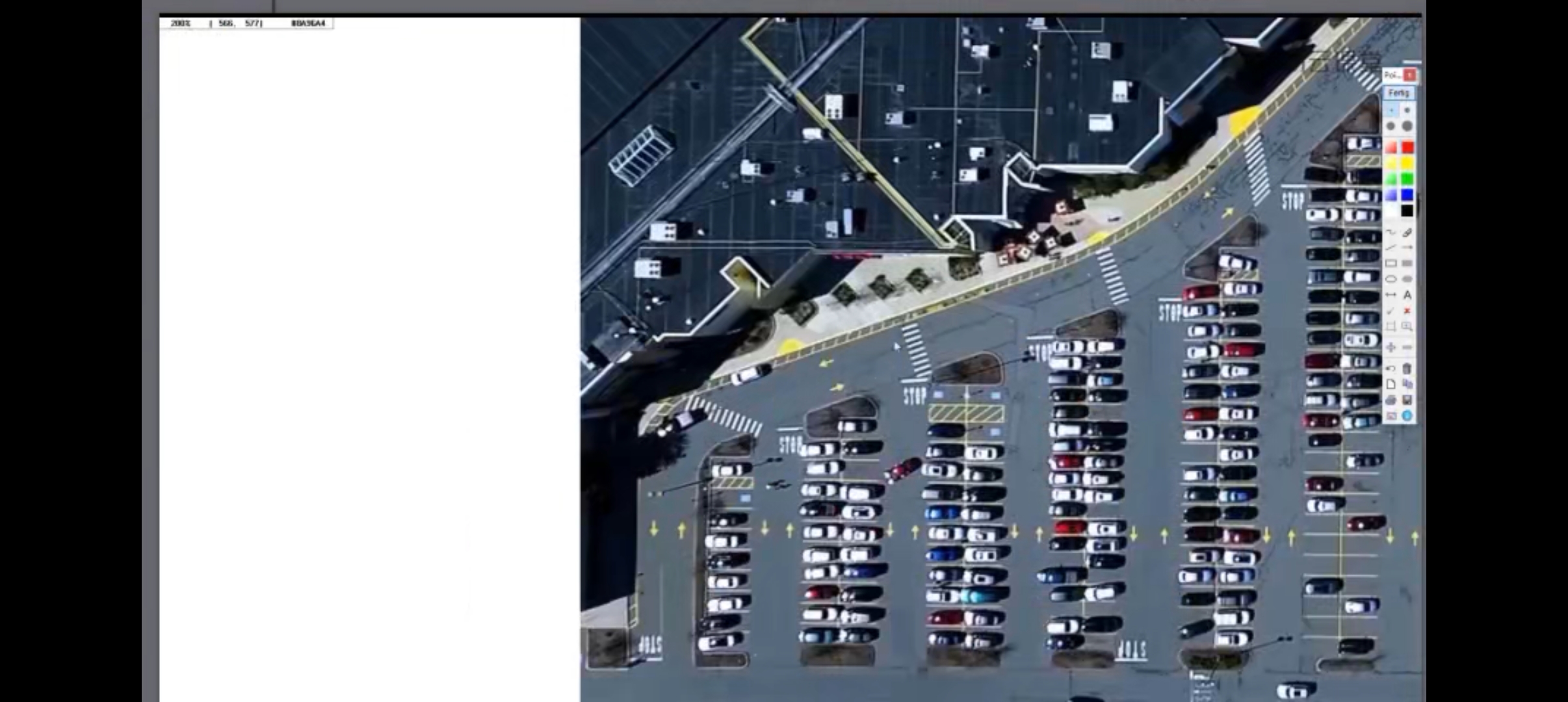
1. 进阶优化与实战
- 复杂场景处理:光照变化、车辆遮挡、视角畸变
- 透视变换矫正:将倾斜的停车场图像矫正为鸟瞰图
- 空车位检测算法优化:结合背景差分、帧差法、机器学习分类器
- 实时检测优化:多线程处理、ROI加速
2. 完整项目实现
- 从视频流中实时检测车位状态
- 车位状态统计、可视化展示
- 项目部署与性能优化
3. 技术延伸:可结合YOLO等深度学习算法,提升检测准确率
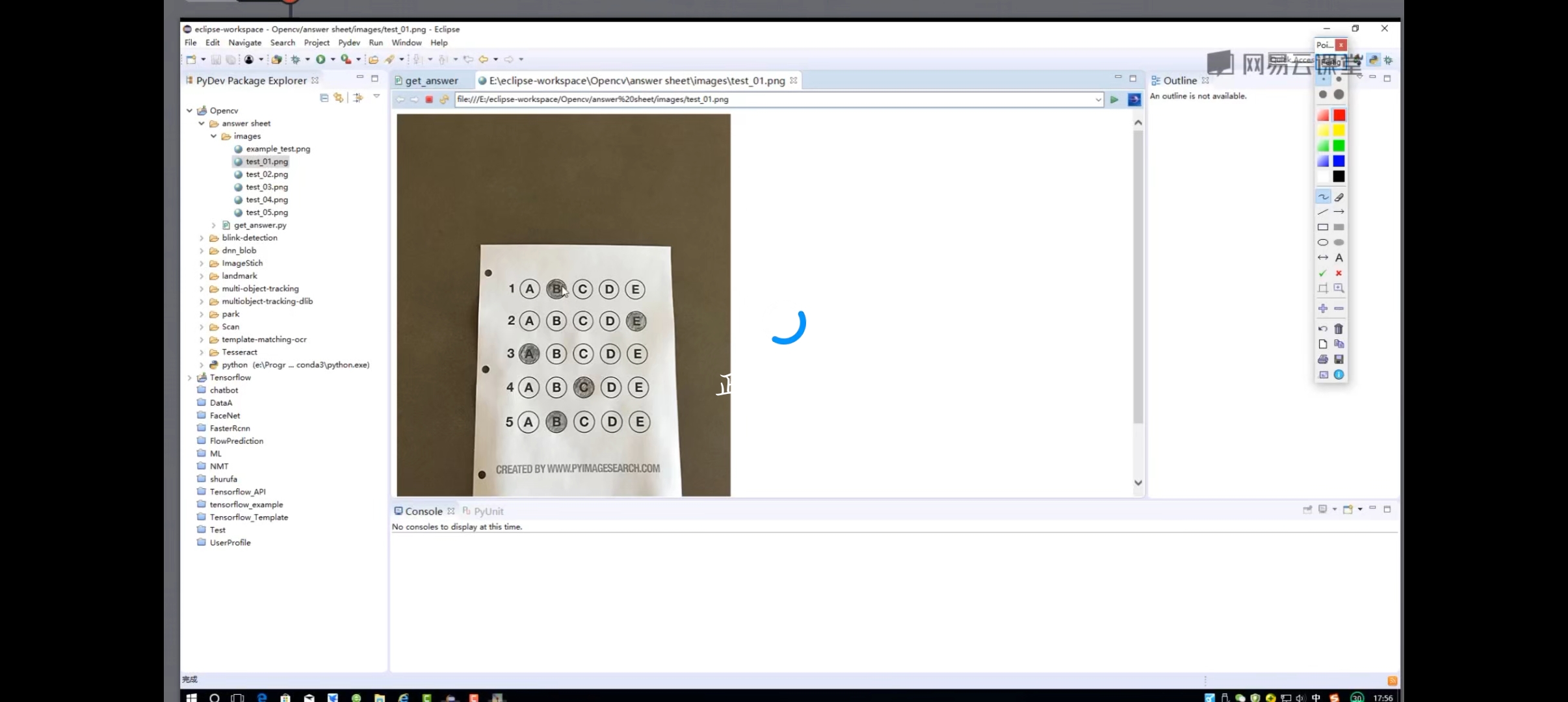
课时39:答题卡识别判卷知识点
1. 答题卡识别完整流程
- 图像预处理:灰度化、去噪、边缘检测、透视变换矫正
- 答题卡轮廓提取:定位答题卡区域
- 选项区域分割:分割每个题目、每个选项的ROI
- 填涂识别:通过轮廓、像素值判断选项是否被填涂
- 答案比对:与标准答案比对,自动判分
- 结果可视化:标注对错、统计分数
2. OpenCV实现
- 透视变换矫正答题卡
- 轮廓检测、轮廓排序,分割选项区域
- 二值化、轮廓提取,识别填涂状态
- 批量答题卡判分的自动化实现
3. 实战优化
- 解决填涂不规范、污渍、折痕等问题
- 答题卡类型适配(A/B卷、不同题型)
4. 应用场景:考试自动判卷、在线教育、智慧校园
学习总结
模块 核心技术 实战项目
环境基础 环境搭建、基础API 无(前置准备)
几何变换 透视变换、轮廓检测 文档扫描
特征检测 Harris/SIFT/ORB角点检测、特征匹配 图像拼接
智能交通 霍夫变换、车位提取、状态检测 停车场车位识别
教育场景 答题卡矫正、填涂识别、自动判分 答题卡自动判卷

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)