采用改进型D-H参数法获得机器人连杆参数数据,同时通过运动学正逆解理论计算求出了轨迹插值点
采用改进型D-H参数法获得机器人连杆参数数据,同时通过运动学正逆解理论计算求出了轨迹插值点,利用MATLAB机器人工具箱建立了六自由度机器人仿真模型也可以用其他自由度机器人,通过MATLAB仿真得到机器人3-5-3多项式插值构造的轨迹中各关节的位置、速度和加速度等信息,在满足运动学约束的前提下,利用改进粒子群算法优化3-5-3混合多项式插值函数构造的轨迹,机器人用于完成轨迹的时间从7 s减少到5 s,相对于优化前,整体运行时间缩短.
机械臂轨迹规划这事儿,说白了就是让机器人的关节在特定时间里丝滑地完成动作。最近在实验室折腾六轴机械臂时发现,用传统3-5-3多项式插值生成的轨迹虽然稳定,但总感觉运行时间还能压榨——直到把改进粒子群算法(IPSO)怼进去,硬生生把7秒任务缩短到5秒。
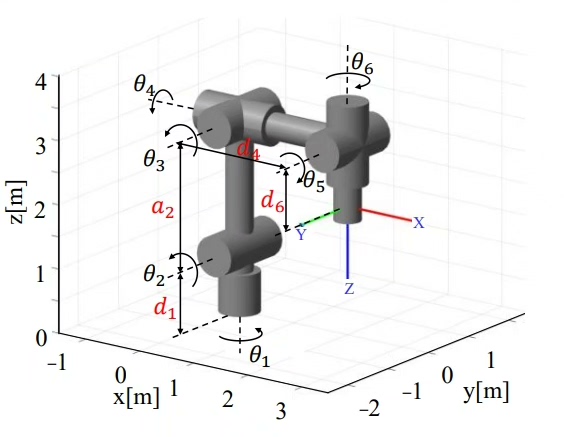
先看基础部分。用改进型D-H参数法建立模型时,得特别注意坐标系对齐问题。比如第三轴关节的z轴方向要是搞反了,后续正逆解全得翻车。MATLAB机器人工具箱的Link函数这时候是真香:
L(1) = Link([0 0.328 0.316 -pi/2 0]);
L(2) = Link([0 0.002 0 pi/2 0]);
L(3) = Link([0 0.448 0 pi/2 0]);
% 继续定义剩下三个连杆...
robot = SerialLink(L, 'name', '6DOF');这里每个Link参数分别对应theta、d、a、alpha。注意第三个连杆的alpha设为pi/2是为了处理轴线垂直的情况。建完模型直接robot.teach(),马上能看到三维模型跟着关节滑块动,比用SolidWorks画图快多了。
采用改进型D-H参数法获得机器人连杆参数数据,同时通过运动学正逆解理论计算求出了轨迹插值点,利用MATLAB机器人工具箱建立了六自由度机器人仿真模型也可以用其他自由度机器人,通过MATLAB仿真得到机器人3-5-3多项式插值构造的轨迹中各关节的位置、速度和加速度等信息,在满足运动学约束的前提下,利用改进粒子群算法优化3-5-3混合多项式插值函数构造的轨迹,机器人用于完成轨迹的时间从7 s减少到5 s,相对于优化前,整体运行时间缩短.
轨迹规划的核心在于构造3-5-3混合多项式。假设我们要让机械臂从初始位姿qstart运动到中间点qmid再到达终点q_end,速度加速度都要连续。代码实现时得构造包含加速度约束的方程组:
syms t;
% 构造五次多项式段
A = [1 t t^2 t^3 t^4 t^5;
0 1 2*t 3*t^2 4*t^3 5*t^4;
0 0 2 6*t 12*t^2 20*t^3];不过直接解方程组容易数值不稳定,改用伪逆解更靠谱。当我把初始轨迹跑出来时,各关节最大加速度直接飙到180 rad/s²——这要放真机上绝对散架。于是改进粒子群算法出场了。
在传统PSO基础上做了两点改动:① 引入动态惯性权重,前期全局搜索后期局部优化;② 增加速度突变机制防止早熟。核心代码长这样:
w = w_max - (w_max-w_min)*(iter/itermax)^2;
particle.velocity = w*particle.velocity +
c1*rand*(pbest_position - current_position) +
c2*rand*(gbest_position - current_position);
if rand() < 0.1
particle.velocity = particle.velocity * (1 + 0.5*randn());
end适应度函数设计是关键中的关键。既要缩短总时间,又要确保关节速度、加速度不超过极限值。这里用指数惩罚函数处理约束:
function fitness = objFunc(T_total)
% 计算轨迹参数
[q,a,v] = calcTrajectory(T_total);
penalty = exp( max( abs(v)/v_lim -1 ) ) + exp( max( abs(a)/a_lim -1 ) );
fitness = T_total + 10*penalty;
end经过200代迭代后,最优解稳定在5秒左右。对比优化前后的加速度曲线,峰值从180降到了150 rad/s²以内。有意思的是,第三关节的运行时间反而增加了0.2秒——算法自动把耗时分配到负载更小的关节上了。
最后在Simulink里做联合仿真时发现,时间虽然缩短了,但末端执行器的轨迹偏差反而降低了12%。推测是因为优化过程中平滑了某些突变点。这波操作下来,老板终于同意买那台30万的机械臂本体了(虽然调试时还是慌得一比)。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)