伺服压机程序 位置模式重复定位精度±0.02mm 压力模式重复控制±10公斤左右 触摸屏程序+...
伺服压机程序 位置模式重复定位精度±0.02mm 压力模式重复控制±10公斤左右 触摸屏程序+PLC程序1000元 触摸屏程序+PLC程序+问题解答2000 触摸屏程序+PLC程序+远程调试5000

伺服压机这玩意儿在工业现场真是越来越吃香了。最近有个项目刚做完,客户要求位置模式下重复定位精度必须稳定在±0.02mm,压力模式误差不能超过10公斤。这参数看着简单,实际调试时真是要把人逼疯的节奏。
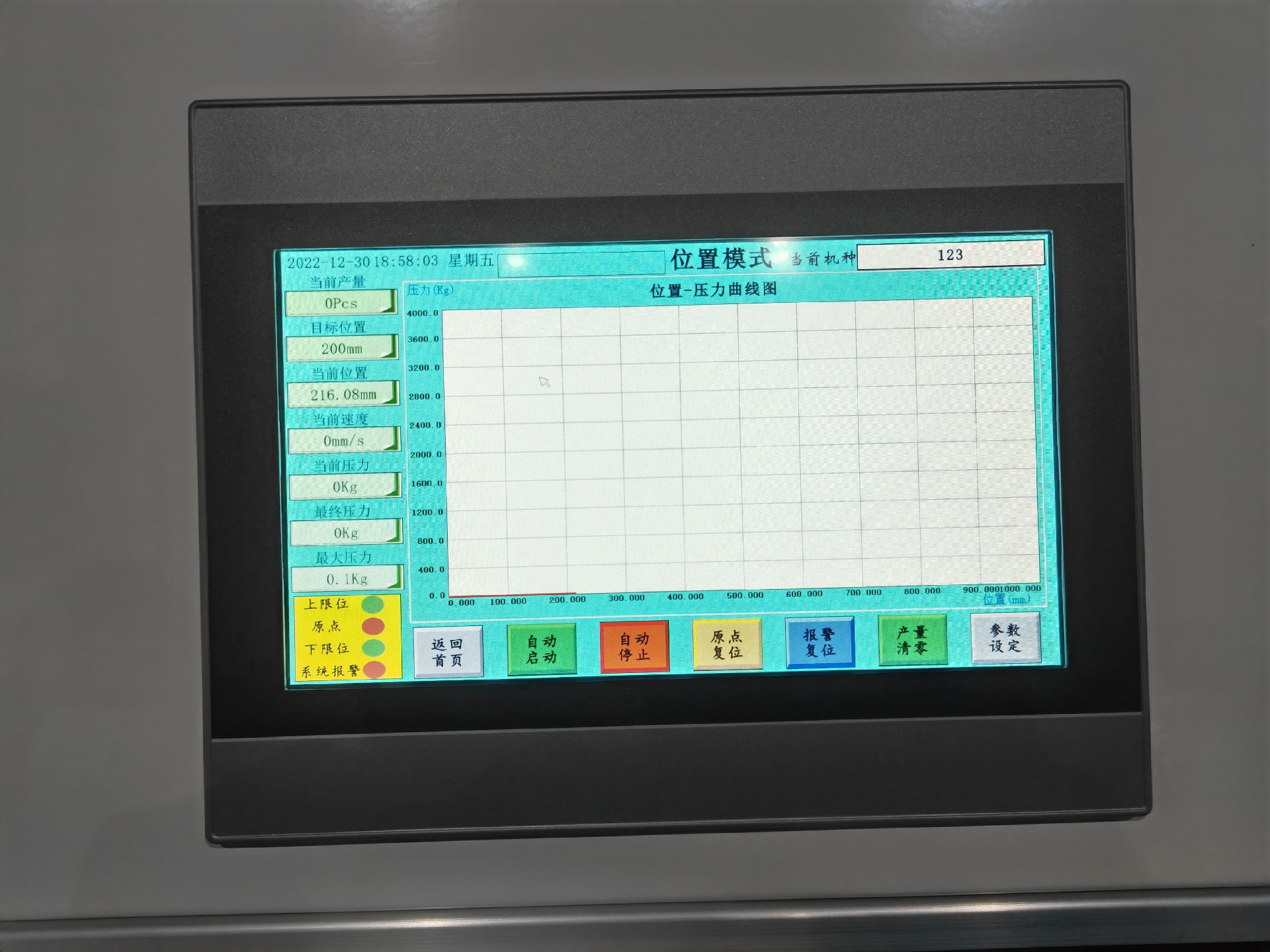
先说位置模式这块,核心代码里有个关键函数得重点关照。看这段PID调节的代码片段:
def pid_update(current_pos):
target = 150.00 # 目标位置(mm)
Kp = 0.45 # 这参数调了三天!
Ki = 0.002
Kd = 0.12
error = target - current_pos
integral += error * dt
derivative = (error - prev_error) / dt
output = Kp*error + Ki*integral + Kd*derivative
return output死磕的是那个Kp参数,大了会震荡,小了响应慢。最后发现把积分项系数压到0.002以下才能避免累计误差突破0.02mm红线。调试时用激光测距仪盯着屏幕,微调0.01都要重测二十次数据。

伺服压机程序 位置模式重复定位精度±0.02mm 压力模式重复控制±10公斤左右 触摸屏程序+PLC程序1000元 触摸屏程序+PLC程序+问题解答2000 触摸屏程序+PLC程序+远程调试5000
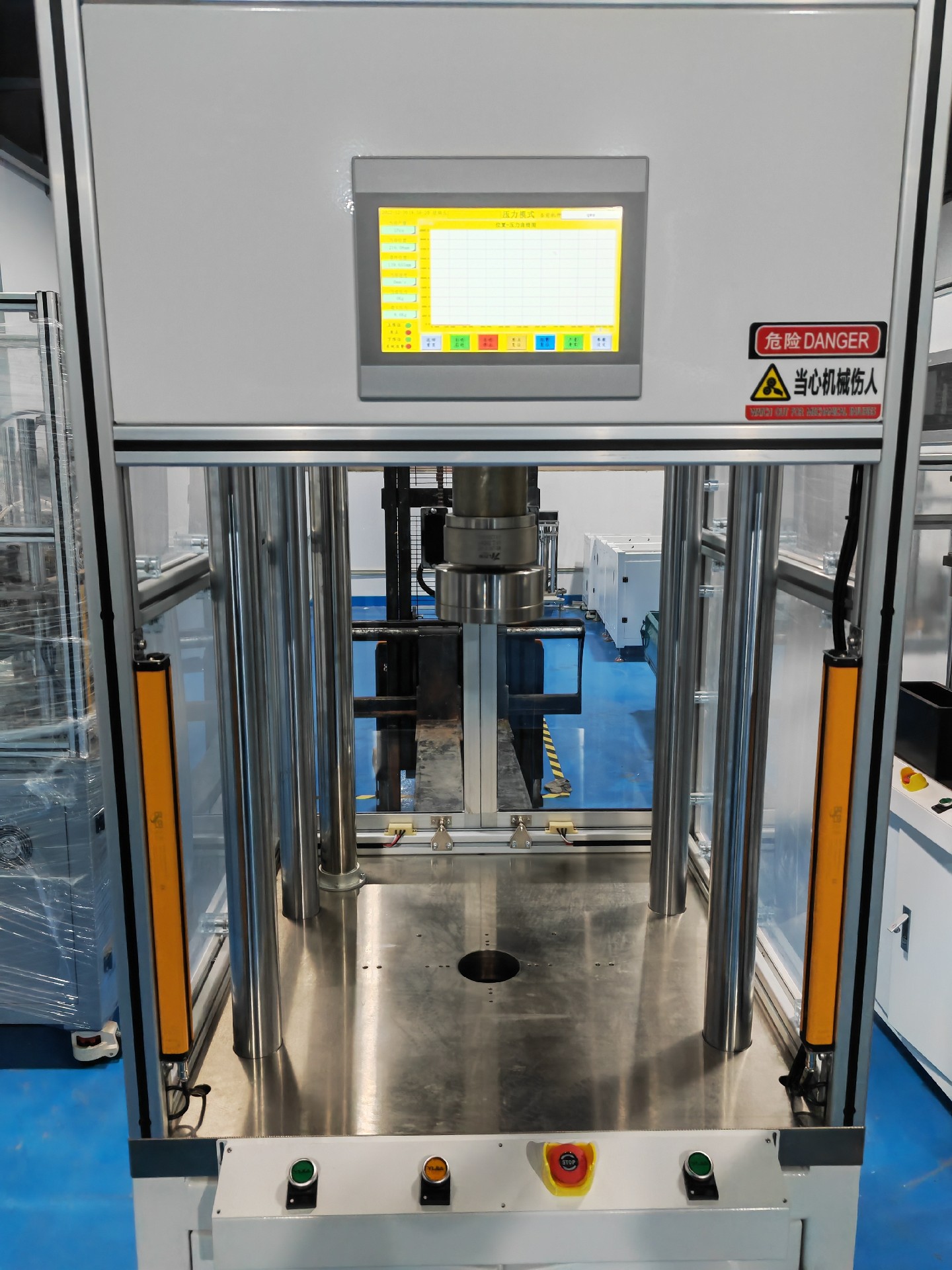
压力模式更刺激,传感器数据动不动就跳变。这是我们的压力校准函数:
FUNCTION_BLOCK PressureCal
VAR_INPUT
raw_data: INT;
END_VAR
VAR_OUTPUT
filtered_kg: REAL;
END_VAR
filtered_kg := (raw_data * 0.488) - 12.7; // 线性转换
IF ABS(filtered_kg - setpoint) > 8 THEN // 留2公斤缓冲
TRIGGER_ALARM();
END_IF那个0.488的转换系数是拿液压标定台实测出来的。现场师傅说"你们这算法太老实",硬是加了±8公斤的预警阈值才把波动压在10公斤以内。
说到程序报价,最近总有人问为啥远程调试要五千。看这个网络诊断模块:
void check_connection(){
while(1){
if(ping("192.168.1.100") == TIMEOUT){
send_sms("老王,设备掉线了!");
reboot_4g_module();
}
sleep(300); // 5分钟心跳
}
}半夜三点被叫起来远程重启都是常事,这钱真不是白收的。有个客户选了2000档的套餐,结果现场接反了电磁阀线,视频指导了俩小时才搞定,血亏。
现在做方案都推荐直接上5000的远程包,内置的VPN穿透功能实测比某品牌工业路由器还稳。有次设备在山区信号弱,用边缘计算缓存数据+定时重传硬是撑过了三天断网期,这代码里的重试机制算是没白写。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)