C#联合OpenCvSharp视觉开发源码功能说明文档
c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源码,包含图像显示控件,绘制roi
一、项目概述
本项目是一套基于C#语言与OpenCvSharp框架开发的视觉处理解决方案,整合了相机设备控制、图像分析、模板匹配、坐标标定等核心功能模块,支持多品牌工业相机接入与复杂视觉检测任务,可广泛应用于工业自动化检测、产品质量把控、机器视觉定位等场景。项目采用模块化设计,各功能模块解耦度高,具备良好的可扩展性与可维护性,同时兼容.NET Framework 4.7.2运行环境,适配主流Windows工业控制系统。
二、核心模块与功能解析
(一)设备控制模块(DeviceLib)
设备控制模块是整个视觉系统的硬件交互核心,通过统一的接口定义(Icam)实现对不同品牌工业相机的标准化控制,目前已支持巴斯勒(Basler)、大华(DaHua)、海康(HK)三大主流品牌相机,涵盖GIGE网口与USB3.0等常见接口类型。
1. 接口规范(Icam)
定义了相机控制的通用接口标准,包含设备连接、图像采集、参数配置、资源释放等核心方法,确保不同品牌相机实现类的行为一致性。关键接口如下:
- 设备连接:
OpenCam(int camIndex, ref string msg),根据相机索引初始化设备,返回连接状态与错误信息; - 图像采集:
OneShot()(单帧采集)、ContinueGrab()(连续采集)、StopGrab()(停止采集),满足不同场景下的图像获取需求; - 参数控制:
SetExposureTime(long dValue)(设置曝光时间)、SetGain(long dValue)(设置增益),支持核心成像参数调节; - 状态监测:
IsAlive(设备在线状态)、IsGrabing(采集状态),便于上层逻辑判断设备运行情况。
2. 相机实现类
各相机实现类均遵循Icam接口规范,针对不同品牌SDK特性进行定制化开发,同时处理设备连接异常、数据格式转换等底层细节:
- 巴斯勒相机(CCD_BaslerGIGE):基于Basler Pylon SDK开发,支持GIGE网口相机心跳检测、USB3.0设备识别,通过
PixelDataConverter实现图像格式从相机原始数据到Bitmap的转换,支持单帧/连续采集模式切换; - 大华相机(CCD_DaHua):集成大华工业相机SDK,采用独立线程(
continueGrapThread)实现连续采集,通过软件触发(ExecuteSoftwareTrigger)控制单帧拍摄,支持图像缓存个数配置(默认8个); - 海康相机(HKCam):基于MvCamCtrl.NET SDK,支持图像格式自动转换(彩色转RGB8、黑白转Mono8),通过回调函数(
GrabImage)处理实时图像数据,兼容海康GIGE与USB系列相机。
3. 辅助功能
- 日志记录:集成OSLog日志组件,记录设备连接、采集异常、参数设置等关键操作日志,便于问题排查;
- 资源管理:实现
IDisposable接口,在析构函数与CloseCam方法中释放相机句柄、图像缓存等资源,避免内存泄漏。
(二)视觉算法模块(FuncToolLib)
视觉算法模块是项目的核心功能层,基于OpenCvSharp实现图像预处理、特征检测、模板匹配、坐标标定等关键视觉算法,覆盖工业场景中常见的检测与定位需求。
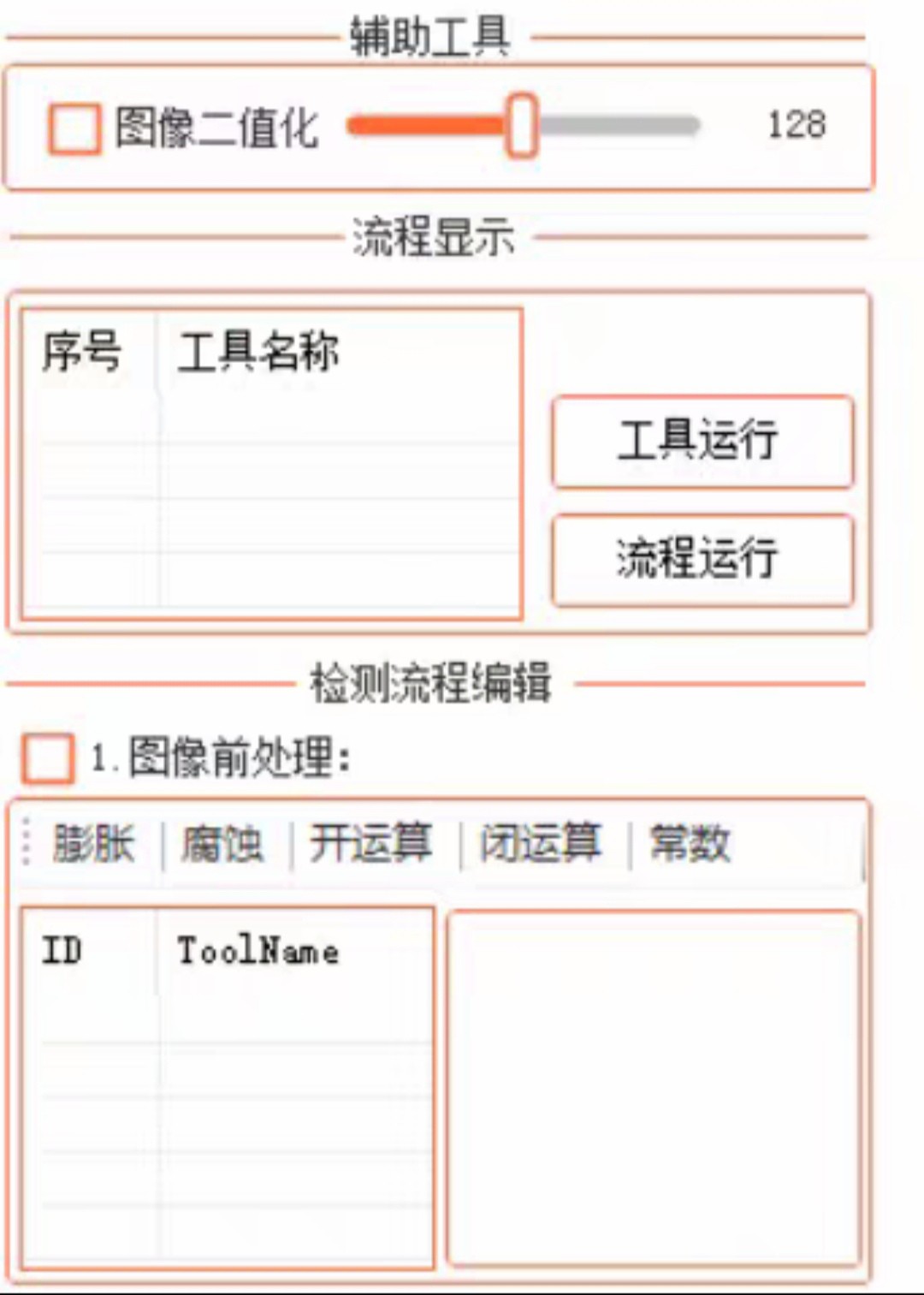
1. 图像预处理
提供多种图像增强与滤波算法,优化图像质量,为后续特征提取奠定基础:
- 滤波操作(ImageFilter):支持方框滤波、均值滤波、高斯滤波、中值滤波、双边滤波,可根据噪声类型与图像特性选择合适的滤波方式,例如中值滤波适用于椒盐噪声去除,双边滤波在降噪同时保留边缘细节;
- 图像增强(ImageEmphize):包含直方图均衡化(提升对比度)、拉普拉斯算子(增强局部细节)、伽马变换(校正灰度分布)、像素缩放(调整灰度范围),适配不同光照条件下的图像优化需求;
- 边缘检测(EdgeTool):基于Canny算子、Sobel算子、Laplacian算子实现边缘提取,支持自定义阈值调节,可用于目标轮廓初步定位。
2. 特征检测与匹配
针对不同目标类型提供多样化的特征检测方案,支持从简单几何形状到复杂模板的识别与定位:
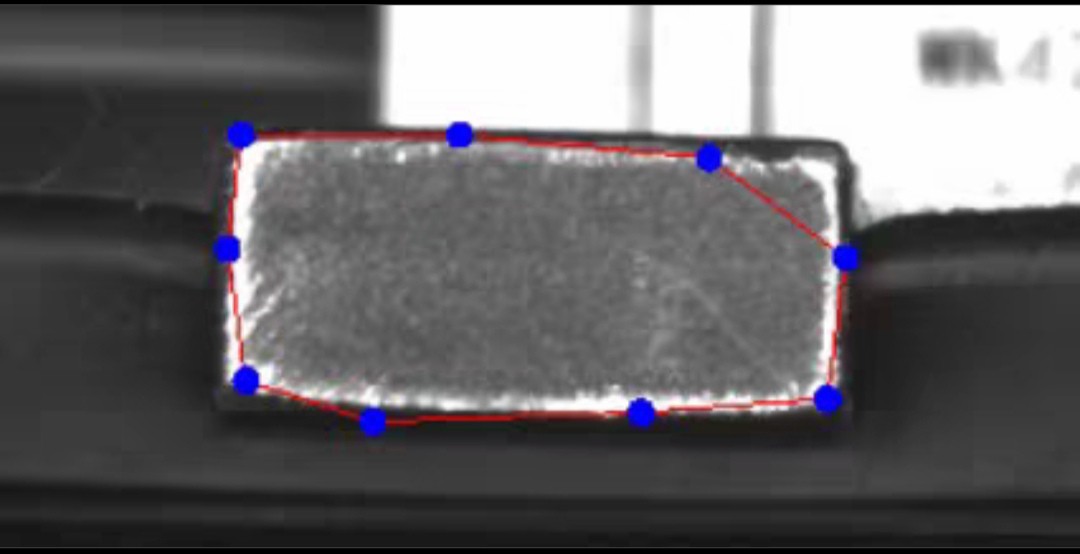
- Blob分析(BlobTool/Blob2Tool/Blob3Tool):通过二值化、连通区域分析提取目标Blob,支持基于面积、圆度、惯性比等参数的筛选,适用于焊点、缺陷等不规则目标检测;
- 几何形状检测:
- 圆检测:
HoughCircleTool(霍夫变换圆检测)、FitCircleTool(最小二乘法圆拟合),支持圆半径范围过滤与圆心坐标精准计算; - 直线检测:
HoughLinesPTool(概率霍夫直线检测)、FitLineTool(直线拟合),可提取图像中的直线特征,用于边缘对齐、角度计算; - 模板匹配:
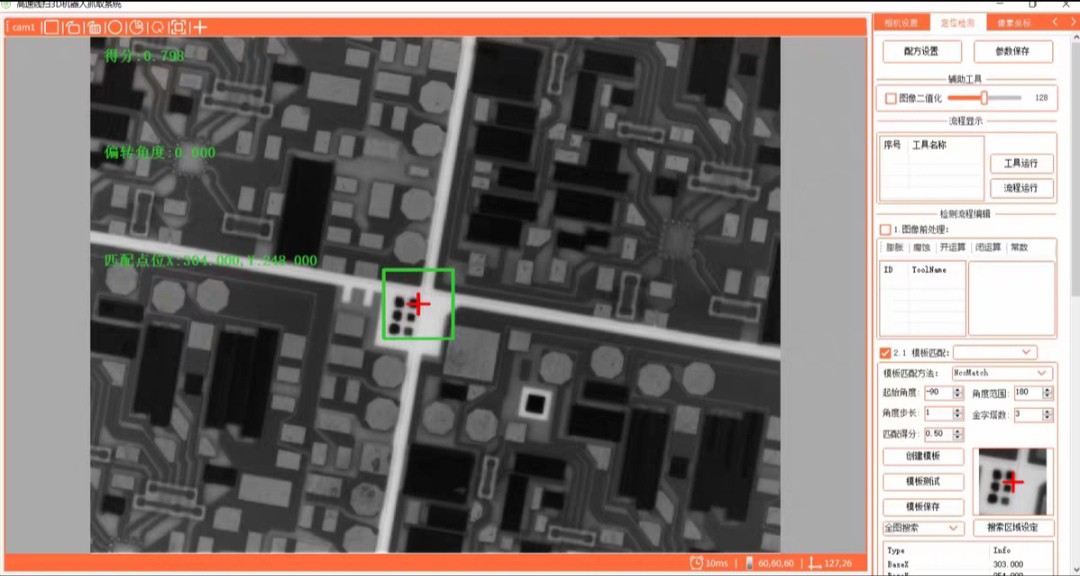
- NCC模板匹配(NccTemplateMatchTool):基于归一化相关系数实现多角度模板匹配,支持图像金字塔下采样加速,适用于目标位置与角度变化场景;
- 形状匹配(ShapeMatchTool):通过轮廓特征匹配目标,支持基于形状相似度的筛选,适用于目标存在尺度变化但轮廓特征明显的场景;
- Canny模板匹配(CannyTemplateMatchTool):先对模板与目标图像进行Canny边缘提取,再基于边缘特征匹配,提升复杂背景下的匹配鲁棒性。
3. 坐标标定与变换
解决图像坐标与实际物理坐标的映射问题,为机器视觉引导提供精准坐标支持:
- 相机标定(CalibrationTool):通过9点标定法建立像素坐标与机器人坐标的仿射变换矩阵,支持标定偏差计算(RMS),确保坐标转换精度;
- 坐标变换(AxisCoorditionRotation):实现点的旋转计算(旋转中心求解、旋转前后坐标转换)、多点圆拟合(支持异常点剔除),适用于目标旋转后的坐标校正场景;
- 轮廓操作(ContourOperate):支持轮廓合并、相减、边界点剔除,可对提取的目标轮廓进行后处理,优化特征提取结果。
4. 专项检测工具
针对工业场景中的特定需求提供定制化检测方案:
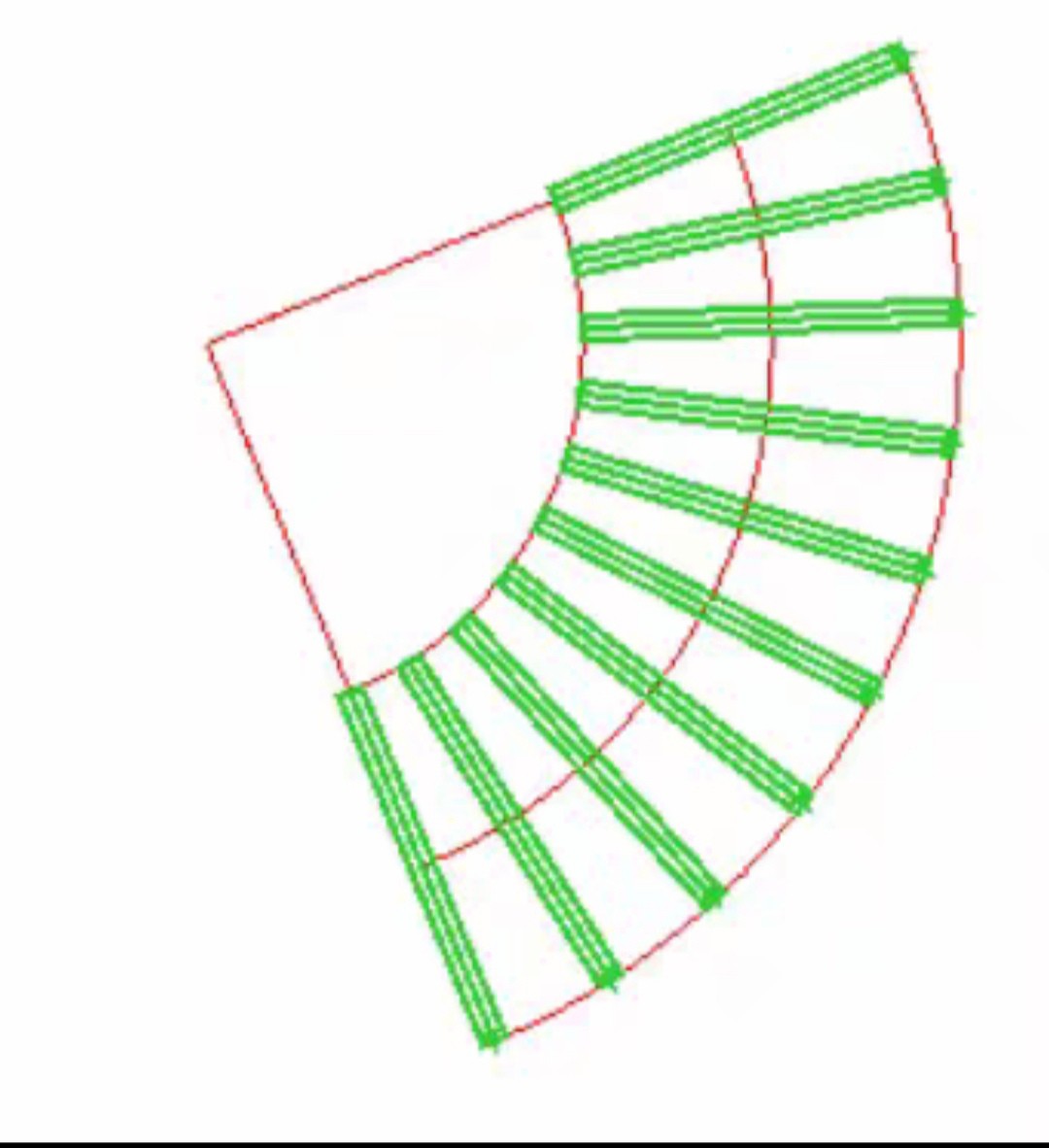
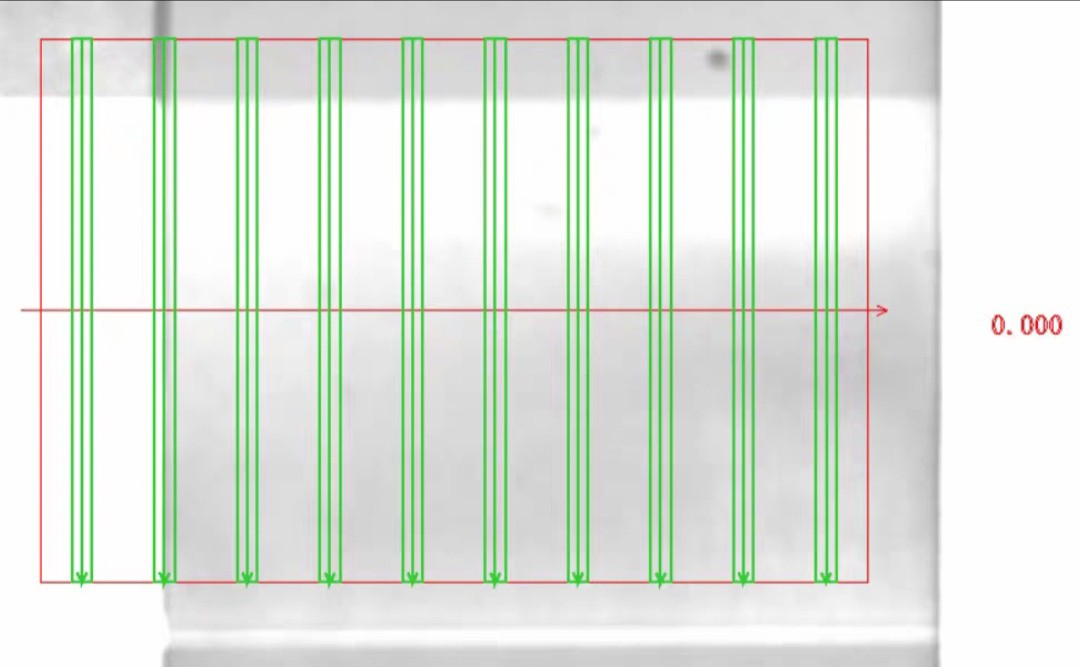
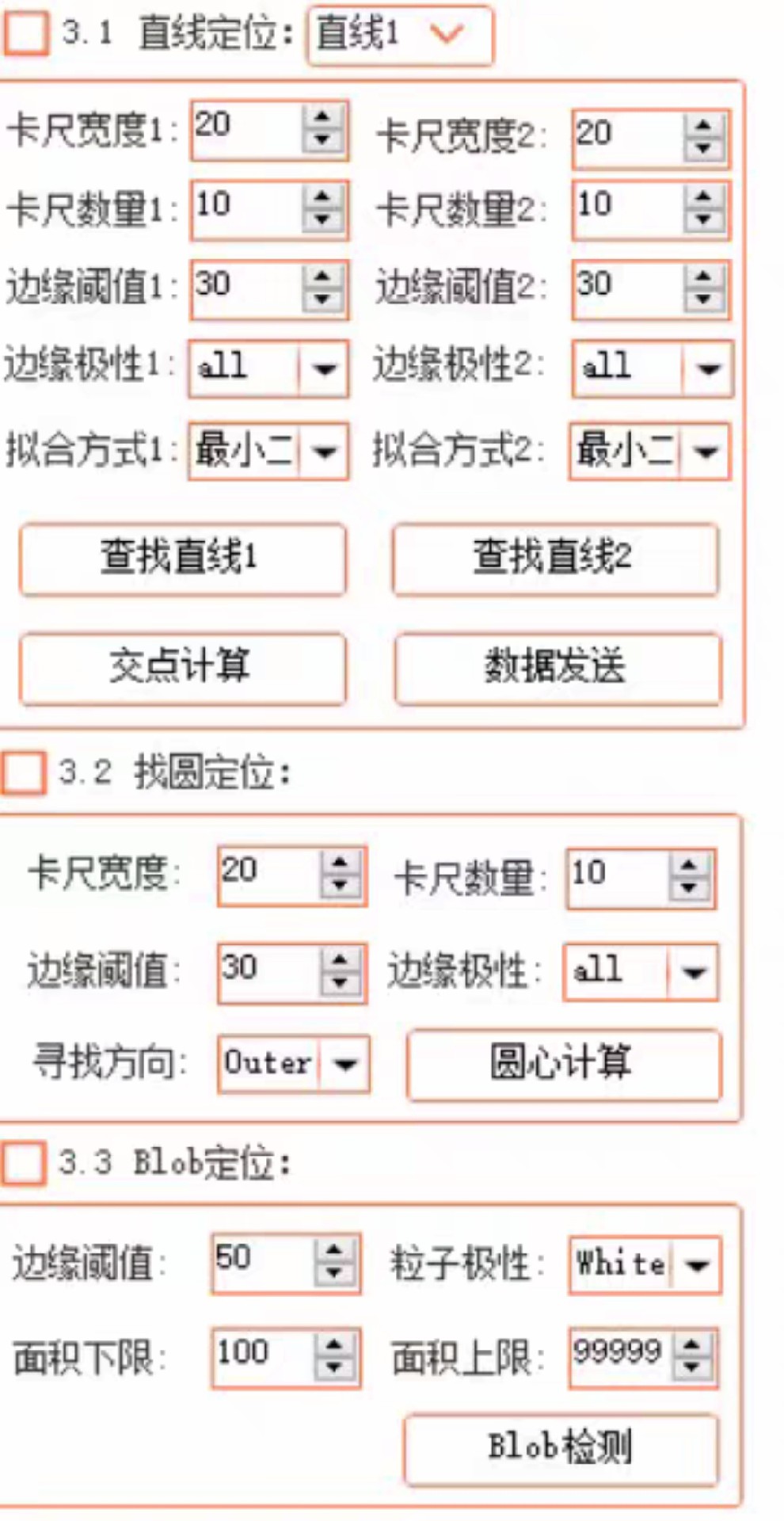
- 卡尺工具(LinearCaliperTool/CircularCaliperTool):
- 直线卡尺:通过多组平行检测线提取目标边缘点,拟合直线并计算直线参数(起点、终点、角度),适用于缝隙宽度、边缘位置检测;
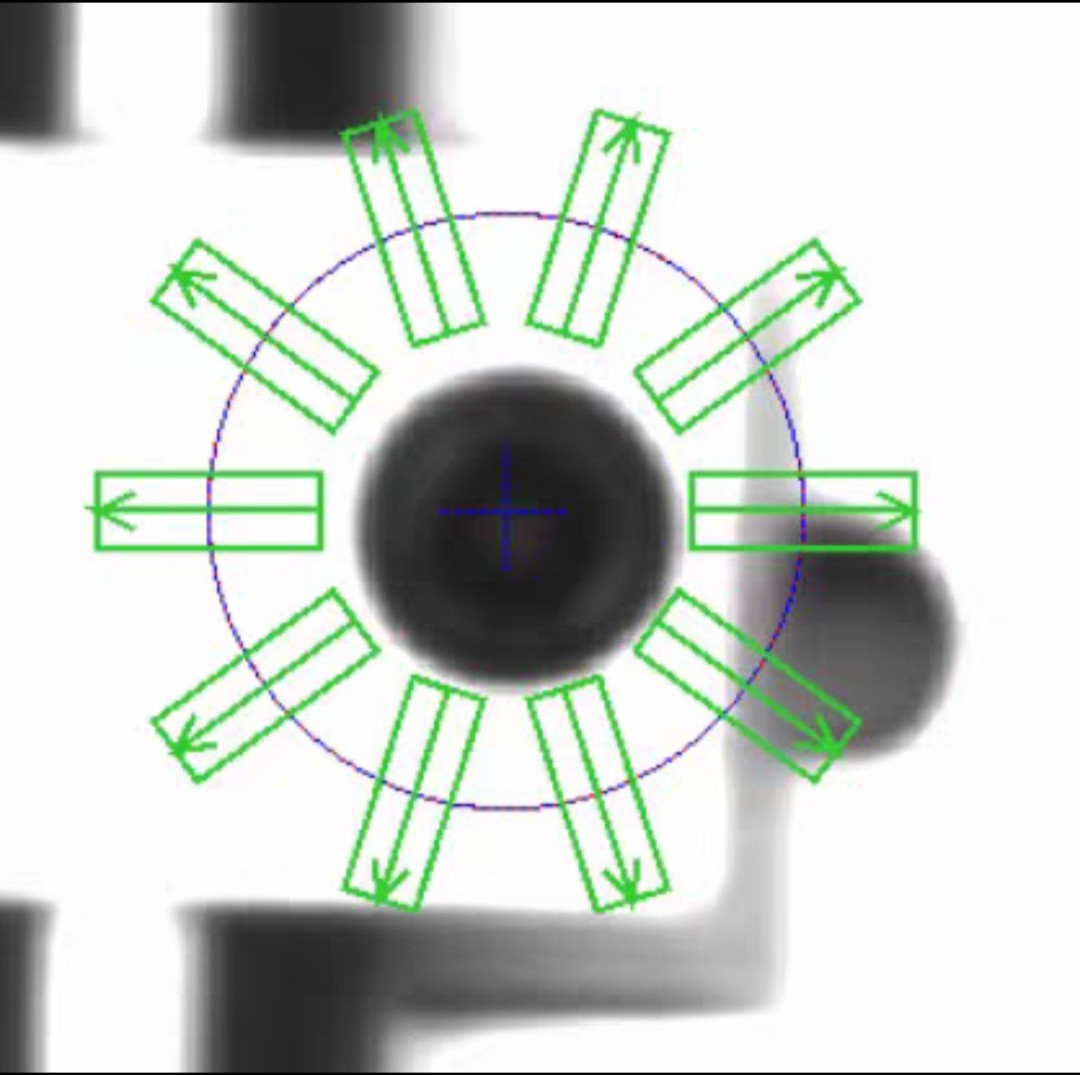
- 圆形卡尺:围绕圆形目标设置多组环形检测线,提取边缘点并拟合圆,支持圆半径与圆心坐标精准计算,适用于圆形零件尺寸检测;
- 胶水检测(GlueCheckTask):通过图像腐蚀、均值滤波、像素缩放等预处理,结合Blob分析检测胶水缺陷(断胶、异物、不均匀),支持自定义检测区域与缺陷面积阈值。
(三)2D码识别模块(CodeReader)
基于Halcon图像库实现2D码识别功能,支持多种主流2D码类型,适用于产品追溯、信息录入等场景:
- 码文模型管理:
createdatacode2dmodel方法创建2D码识别模型,支持自定义码类型(如Data Matrix ECC 200、QR Code、PDF417)与识别参数; - 模型训练与保存:
Traincodemodel实现基于样本图像的模型训练,SaveCodeFile/LoadCodeFile支持模型文件的保存与加载,提升同类2D码的识别效率; - 实时识别:
ReadCode方法处理实时图像中的2D码,返回识别结果与码文位置,支持识别结果可视化(绘制码文轮廓与识别文本)。
(四)形状匹配DLL模块(Dll1)
基于C++与OpenCV开发的形状匹配动态链接库,提供高效的模板匹配算法,适用于对速度要求较高的工业场景:
- 模板创建(CreateMatchModel):对模板图像进行多尺度、多角度预处理,生成金字塔层级模板,支持对比度阈值、旋转角度范围、缩放比例范围自定义;
- 模板匹配(FindGeoMatchModel):采用分层匹配策略(从金字塔顶层到底层),快速定位目标位置,返回匹配得分、中心坐标、旋转角度与缩放比例;
- 边缘提取与优化:通过Sobel算子计算梯度、非极大值抑制、滞后阈值处理提取模板边缘,提升匹配鲁棒性。
三、项目架构与设计亮点
(一)模块化设计
项目采用分层架构,设备控制、视觉算法、码识别等模块独立封装,模块间通过接口交互,降低耦合度。例如,视觉算法模块不依赖具体相机实现,可适配任意遵循Icam接口的相机设备;同时,算法模块内部按功能拆分为预处理、特征检测、标定等子模块,便于功能扩展与维护。
(二)接口标准化
通过Icam接口统一相机控制逻辑,通过IRunTool接口规范算法工具的调用方式,确保新增设备或算法时无需修改上层代码,仅需实现对应接口即可。例如,新增新品牌相机时,只需编写遵循Icam接口的相机实现类,无需调整图像采集与参数控制的上层逻辑。
(三)性能优化
- 多线程处理:相机连续采集、Blob分析等耗时操作采用独立线程处理,避免阻塞主线程,提升系统响应速度;
- 图像金字塔:模板匹配算法采用图像金字塔分层匹配,顶层快速粗定位,底层精准计算,平衡匹配速度与精度;
- 资源复用:图像缓存、算法模型等资源通过单例或池化管理,减少重复创建与销毁带来的性能开销。
(四)易用性与可扩展性
- 参数可配置:所有算法与设备参数支持外部配置(如滤波核大小、匹配阈值、相机曝光时间),无需修改代码即可适配不同场景;
- 结果可视化:关键检测结果(如目标位置、轮廓、码文)支持图像绘制,便于调试与现场操作人员查看;
- 日志与异常处理:完善的日志记录与异常捕获机制,便于问题排查与系统维护。
四、应用场景与适配需求
(一)典型应用场景
- 工业自动化检测:如电子产品焊点缺陷检测(Blob分析)、金属零件尺寸测量(圆拟合、直线检测)、胶水涂覆质量检测(GlueCheckTask);
- 机器视觉定位:如机械手抓取引导(NCC模板匹配)、零件装配对齐(坐标标定)、印刷品套印精度检测(直线卡尺);
- 产品追溯:如2D码识别(FindDataCode2d)、零件编号读取,实现产品全生命周期追溯。
(二)环境依赖
- 运行环境:Windows 7/10/11(32/64位),.NET Framework 4.7.2;
- 依赖库:OpenCvSharp 4.5.3、Basler Pylon SDK、大华相机SDK、海康MvCamCtrl.NET SDK、Halcon 17.12(2D码识别);
- 硬件要求:工业相机(巴斯勒/大华/海康)、CPU支持SSE4.2(提升OpenCV算法速度)、内存≥4GB(处理高分辨率图像)。
五、总结与展望
本项目通过C#与OpenCvSharp的结合,实现了一套功能完善、性能稳定的工业视觉解决方案,覆盖从设备控制到算法落地的全流程。模块化设计与接口标准化确保系统具备良好的可扩展性,可根据实际需求新增相机型号、算法功能或适配新场景。
c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源码,包含图像显示控件,绘制roi
未来可进一步优化的方向:
- 深度学习集成:引入YOLO、CNN等深度学习模型,提升复杂场景下的目标检测精度;
- 多相机协同:支持多相机同步采集与数据融合,适用于大视野或多角度检测场景;
- 跨平台适配:基于.NET Core重构核心模块,支持Linux等非Windows工业系统;
- 可视化配置工具:开发图形化配置界面,简化参数设置与算法调试流程,降低使用门槛。


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 25
25 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)