脉冲注入法,持续注入,启动低速运行过程中注入,电感法,ipd,力矩保持,无霍尔无感方案,媲美有...
脉冲注入法,持续注入,启动低速运行过程中注入,电感法,ipd,力矩保持,无霍尔无感方案,媲美有霍尔效果。 bldc控制器方案,无刷电机。 提供源码,原理图。
一、概述
本文档详细说明基于华大HC32L13x系列MCU的无霍尔无刷直流(BLDC)电机控制代码功能。该代码采用脉冲注入法(IPD)实现转子初始位置检测,结合反电动势(BEMF)检测技术实现电机无传感器闭环控制,适用于对成本敏感、空间受限的电机控制场景(如小型风扇、泵体、轻载电机驱动等)。
脉冲注入法,持续注入,启动低速运行过程中注入,电感法,ipd,力矩保持,无霍尔无感方案,媲美有霍尔效果。 bldc控制器方案,无刷电机。 提供源码,原理图。
代码整体基于华大DDL(Device Driver Library)开发,遵循模块化设计原则,涵盖时钟配置、GPIO初始化、ADC采样、PWM驱动、中断管理、电机控制核心算法等功能模块,具备启动稳定、运行高效、可靠性强的特点。
二、核心功能架构
代码功能架构分为基础层、硬件抽象层和应用层三层设计,各层职责清晰、逐层解耦:
(一)基础层
- 时钟配置:实现系统时钟初始化与频率校准,为整个系统提供稳定时钟源。
- 中断管理:统一管理MCU外设中断(定时器、ADC、GPIO等),实现中断优先级配置、标志位清除、中断使能/禁用等功能。
- 数据类型定义:标准化布尔型、浮点型、函数指针等基础数据类型,定义通用错误码枚举,保障代码可移植性。
(二)硬件抽象层
- GPIO驱动:配置电机驱动GPIO引脚(PWM输出、BEMF检测输入、按键输入、LED指示输出等),定义引脚方向、驱动能力、上下拉模式等参数。
- ADC驱动:初始化ADC模块,实现电机相电流、MOS管温度、转速相关信号的高精度采样。
- 定时器驱动:配置TIM3生成PWM波形(用于电机三相桥驱动)、TIM0实现定时中断(用于电机控制周期调度)、SysTick实现毫秒级系统滴答计时。
- 比较器(VC)驱动:利用VC模块检测反电动势过零点,为电机换相提供精准触发信号。
- 运算放大器(OPA)驱动:配置OPA实现信号放大,提升弱信号(如电流采样信号)的检测精度。
(三)应用层
- 电机启动控制:通过脉冲注入法(IPD)实现转子初始位置检测,确保电机平稳启动。
- 运行控制:基于反电动势过零点检测实现换相控制,动态调整PWM占空比以调节电机转速和扭矩。
- 状态监测与保护:实时监测电机锁死、MOS管过温、过流等异常状态,触发相应保护机制(如停机、重启)。
- 人机交互:处理用户按键输入(启动/停止、方向切换),通过LED指示电机运行状态。
三、关键功能详细说明
(一)系统初始化
系统上电后首先执行初始化流程,为电机控制提供基础运行环境:
- 时钟初始化:配置RCH(内部高速时钟)为4MHz,通过PLL倍频至48MHz作为系统主时钟,配置HCLK、PCLK分频系数,使外设获得合适工作频率;同时配置SysTick定时器,生成1ms定时中断,用于系统延时和周期任务调度。
- GPIO初始化:配置电机三相桥驱动引脚为PWM输出模式,BEMF检测引脚为模拟输入模式,用户按键引脚为上拉输入模式,LED引脚为推挽输出模式。
- ADC初始化:配置ADC为单通道采样模式,选择合适的采样时钟和采样时间,使能相电流采样、温度采样等通道。
- 定时器初始化:TIM3配置为互补PWM输出模式,生成20KHz PWM波形用于电机驱动;TIM0配置为定时中断模式,用于电机控制算法周期执行。
- VC与OPA初始化:配置VC模块检测BEMF过零点,OPA模块放大电流采样信号,提升检测精度。
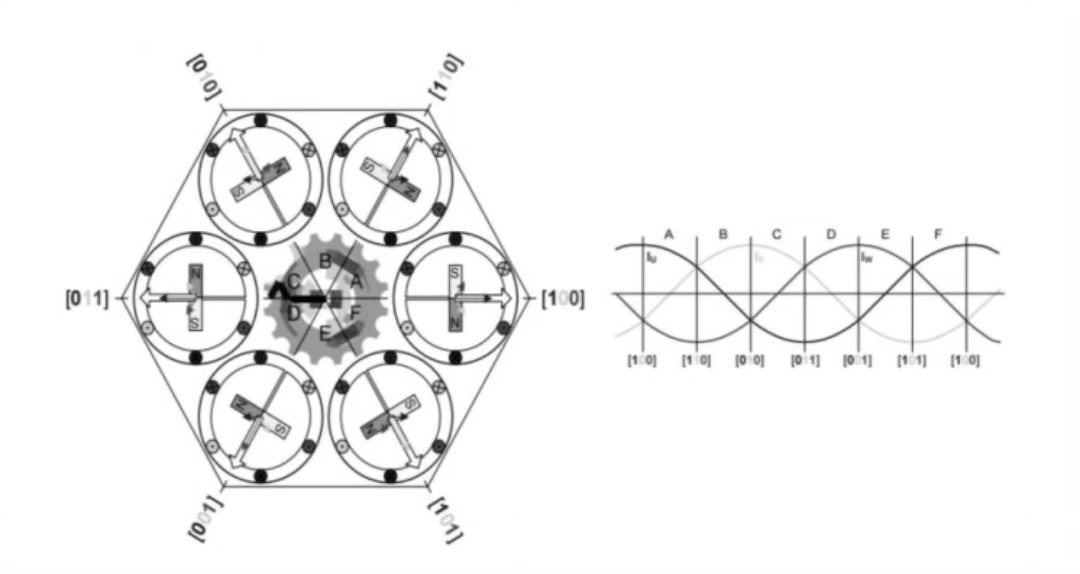
(二)转子初始位置检测(IPD)
无霍尔BLDC电机启动前需获取转子初始位置,否则无法实现正确换相,代码采用脉冲注入法(IPD)实现该功能:
- 依次向电机三相绕组注入特定时序的短时电流脉冲(不同相组合导通)。
- 通过ADC采样各相绕组的电流响应值,存储至电流检测数组。
- 分析电流响应数据,判断转子所在的机械角度区间,确定初始位置。
- 根据初始位置计算首个换相点,为电机启动做好准备。
该过程通过关闭所有MOS管→延时→导通特定相组合→采样电流→关闭MOS管的循环流程实现,注入脉冲的时长和间隔通过宏定义配置,确保检测精度和电机安全性。
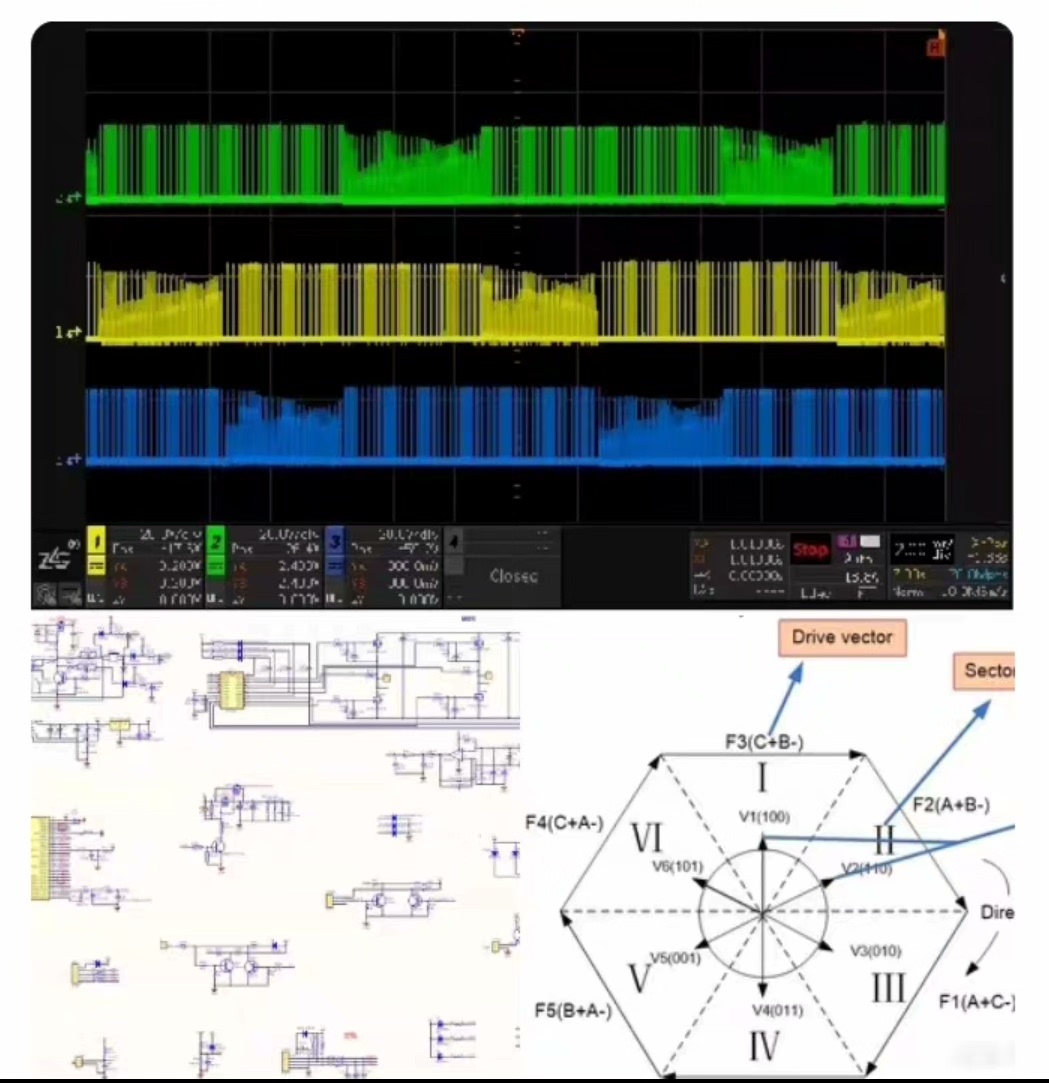
(三)电机启动与运行控制
- 启动阶段:基于IPD检测到的初始位置,按照预设换相序列输出PWM信号,逐步提升PWM占空比,使电机转速从0逐步上升至反电动势可稳定检测的阈值转速。
- 运行阶段:当电机转速达到阈值后,切换至反电动势过零点检测模式,通过VC模块实时监测各相BEMF过零点信号,触发TIM3中断进行换相;同时根据用户设定的目标转速,动态调整PWM占空比,实现转速闭环控制。
- 换相控制:采用六步换相法,根据电机转向(顺时针/逆时针)和当前换相状态,依次切换三相桥上下桥臂的导通状态,确保电机持续平稳运行。
(四)状态监测与保护机制
为保障电机和驱动系统安全,代码设计了完善的状态监测和保护功能:
- 电机锁死保护:实时监测电机换相间隔,若超过设定时间未检测到换相信号,则判定为电机锁死,触发停机或重启机制,避免烧毁驱动管。
- 过温保护:通过ADC采样MOS管温度,当温度超过设定阈值时,降低PWM占空比或停机,温度恢复后自动恢复运行。
- 过流保护:通过ADC采样相电流,当电流超过安全阈值时,立即关闭所有MOS管,切断电机供电,防止电流过大损坏器件。
- 按键控制:支持用户通过按键启动/停止电机,按键检测采用消抖处理,避免误触发。
(五)中断管理
代码通过中断机制实现实时响应,关键中断包括:
- TIM3中断:PWM周期中断,用于换相控制和BEMF过零点检测。
- ADC中断:采样完成中断,用于读取采样数据并进行滤波处理。
- SysTick中断:1ms定时中断,用于周期执行电机控制算法、状态监测等任务。
- VC中断:BEMF过零点中断,触发换相动作。
中断管理模块提供统一的中断使能、优先级配置、标志位清除接口,确保中断响应的及时性和可靠性。
四、核心设计特点
- 无霍尔设计:无需霍尔传感器,通过脉冲注入法和反电动势检测实现电机控制,降低硬件成本和安装复杂度。
- 模块化架构:各功能模块独立设计,接口清晰,便于维护和功能扩展。
- 高可靠性:具备锁死、过温、过流等多重保护机制,避免器件损坏。
- 可配置性:核心参数(如PWM频率、采样时间、保护阈值等)通过宏定义配置,适配不同规格电机。
五、应用场景与适配说明
该代码适用于功率较小(≤50W)、对成本敏感的无霍尔BLDC电机控制场景,如小型直流风扇、静音泵、小型家电等。用户可通过修改以下宏定义适配不同电机:
- PWM频率、周期和占空比限制。
- IPD脉冲注入时长和间隔。
- 反电动势检测阈值。
- 过温、过流保护阈值。
- 转速调节步长和目标转速范围。
六、总结
本代码基于HC32L13x系列MCU,实现了无霍尔BLDC电机的完整控制方案,涵盖初始化、转子位置检测、启动、运行、保护等全流程功能。代码采用模块化设计,兼顾可靠性、可移植性和可配置性,可直接用于相关产品开发,或根据具体需求进行二次开发。核心优势在于无需霍尔传感器降低成本,通过精准的脉冲注入和反电动势检测确保电机稳定运行,多重保护机制提升系统安全性。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 41
41 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)