TPAMI 2025 重磅|CLRNetV2:让自动驾驶 “看清” 密集车道与极端路况的全能检测框架
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达你有没有想过,当自动驾驶汽车穿梭在复杂路况时,它是如何精准识别车道线的?暴雨天车道被积水覆盖、十字路口车道分叉成Y形、前车遮挡导致车道"消失"……这些场景对人类司机都是挑战,对AI来说更是难上加难。
今天要给大家介绍一篇TPAMI 2025的重磅论文——《CLRNetV2: A Faster and Stronger Lane Detector》。这个由浙江大学等机构研发的全新车道检测框架,就像给自动驾驶装上了"火眼金睛",不仅看得准,还跑得飞快!
论文信息
题目:CLRNetV2: A Faster and Stronger Lane Detector
CLRNetV2:更快更强的车道检测器
作者:Tu Zheng, Yifei Huang, Yang Liu, Binbin Lin, Zheng Yang, Deng Cai, Xiaofei He
为什么车道检测这么难?
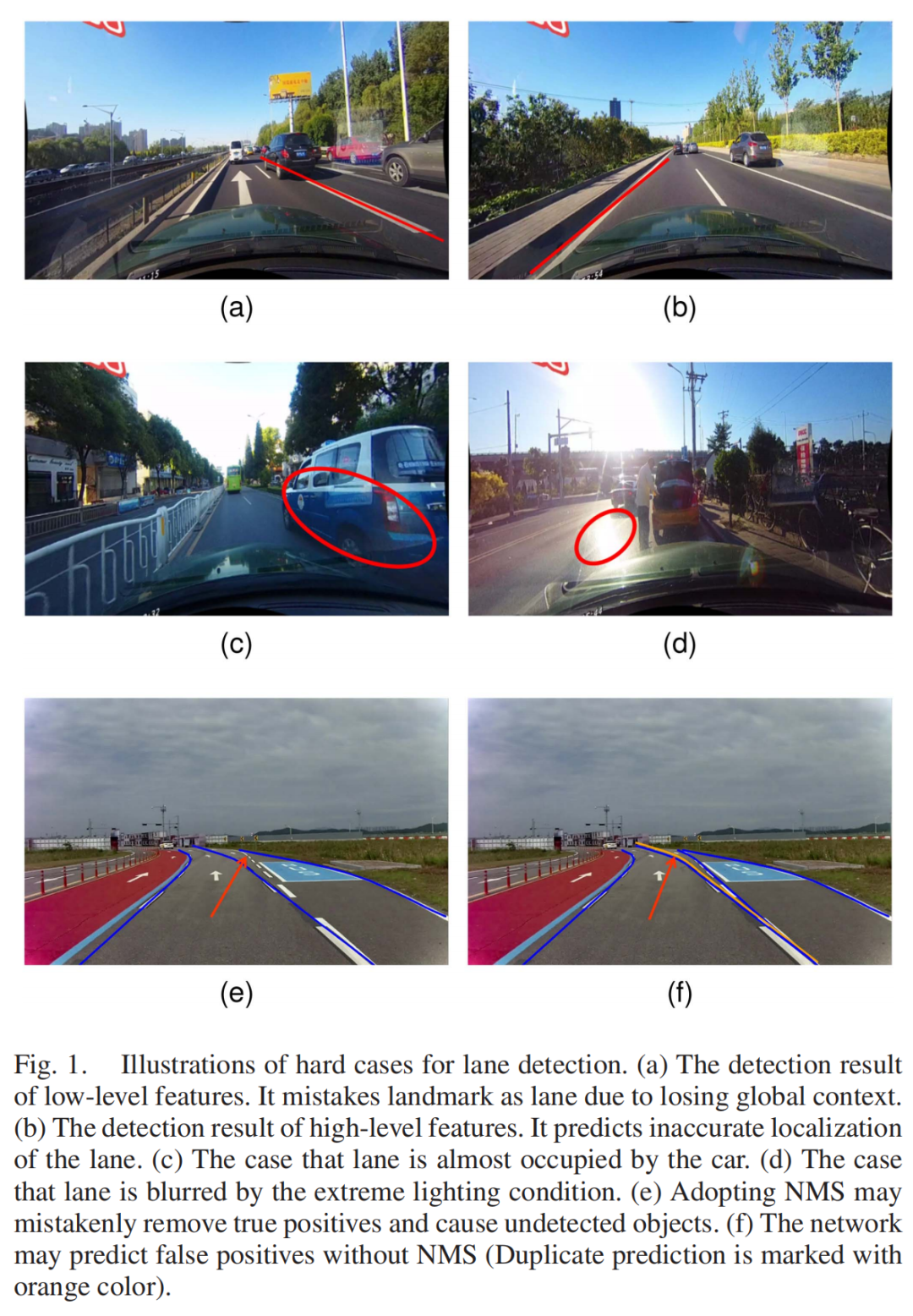
别看车道线只是几条简单的白线,要让AI准确识别可没那么容易。论文里总结了三大核心难题:
-
特征矛盾:车道既有高级语义(比如和路边白线的区别),又需要精确的细节定位。高层特征能辨语义,低层特征能定位置,但怎么把两者结合好?
-
视觉证据缺失:遇到车辆遮挡、强光直射或隧道出入口时,车道线可能完全"隐形"。这时AI该怎么判断车道位置?
-
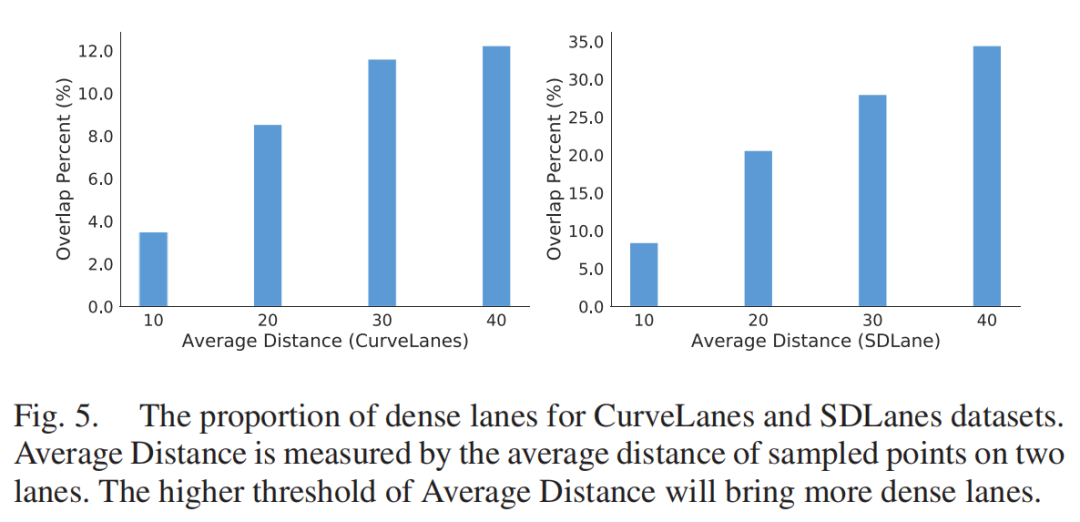
密集车道困境:在高速出入口、十字路口等场景,车道会分叉成Y形或多叉状。传统算法要么把真实车道当成重复预测删掉,要么保留大量假阳性结果。
看看这些让人头疼的场景,是不是瞬间理解了AI的"难处":
CLRNetV2的四大"黑科技"
针对这些难题,研究团队提出了四大创新模块,就像给AI配备了一整套"车道检测神器"。
1. 跨层精炼网络:高低搭配,干活不累
人类识别车道时,会先看大概位置(高层语义),再聚焦细节(低层特征)。CLRNetV2模仿这种思路,设计了"跨层精炼"机制:
-
先用高层特征快速锁定车道大致位置
-
再用低层特征逐步优化精度
-
就像先用望远镜找到目标,再用显微镜仔细观察
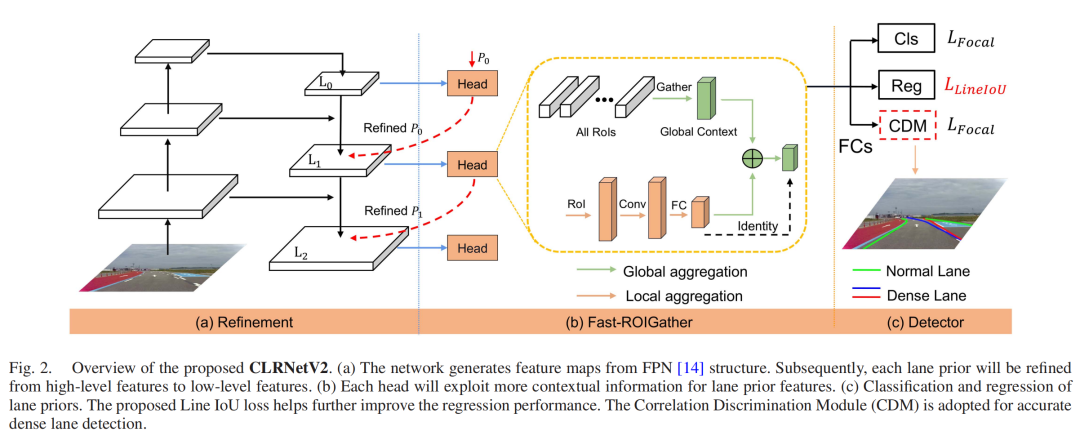
这种设计让网络既能看懂"这是车道不是其他标志",又能精确到像素级定位,解决了特征矛盾问题。
2. Fast-ROIGather:全局信息"收集器"
遇到车道被遮挡怎么办?CLRNetV2的Fast-ROIGather模块就像个情报员,能收集全局信息来"推理"被遮挡的部分:
-
沿着车道线方向聚合局部信息,让每个点都能参考邻居的特征
-
用注意力机制建立全局联系,让"消失"的车道段能从周围环境找线索
-
最关键的是,它比传统方法快得多!计算复杂度从O(HWC²)降到O(NpC)
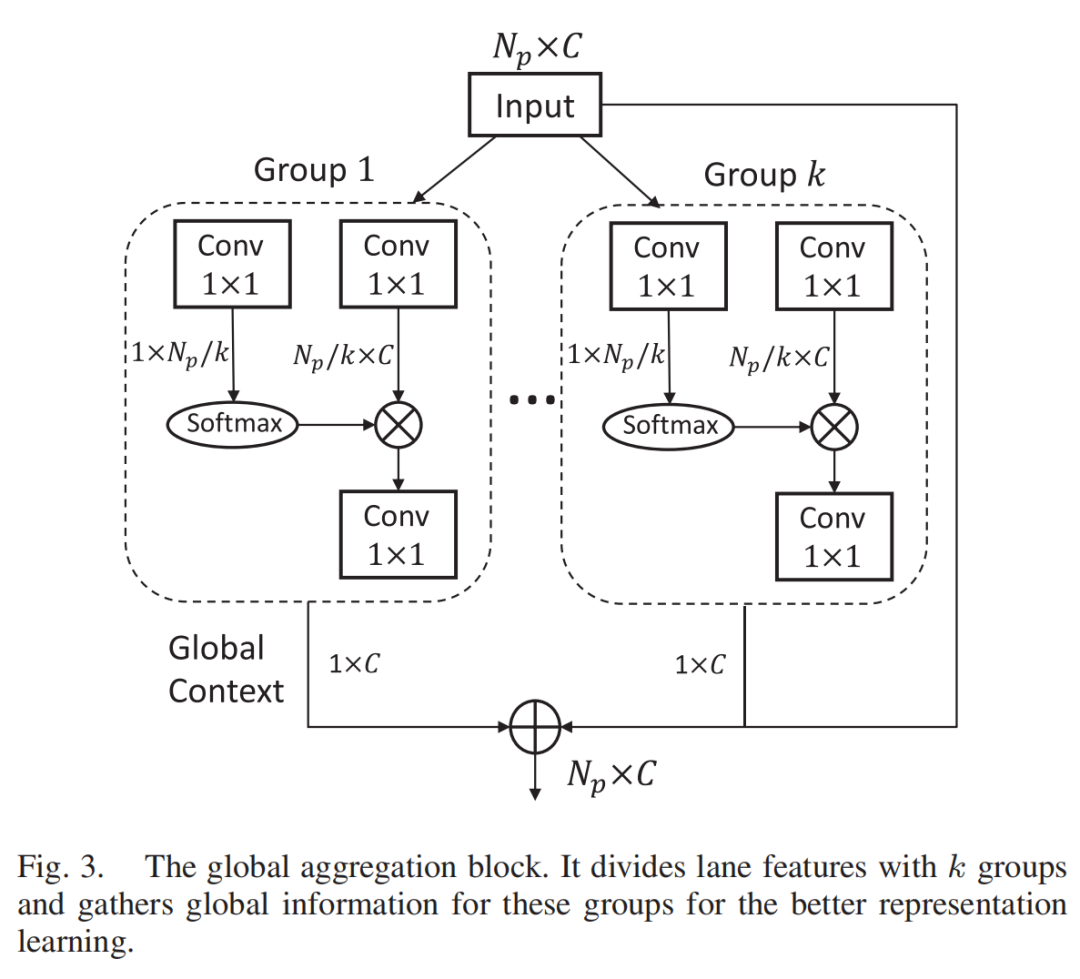
有了这个模块,即使车道被大车挡住,AI也能根据前后的车道走势,推测出被遮挡部分的位置。
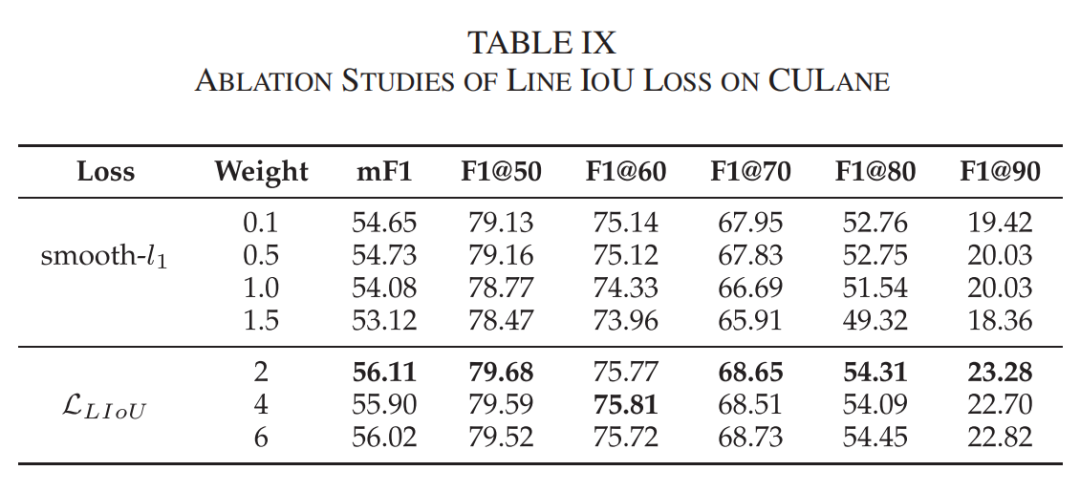
3. Line IoU损失:把车道当整体看
传统算法把车道线拆成一个个点来回归,就像把句子拆成字母来学,效果肯定不好。Line IoU损失则把车道当成完整线段:
-
计算两条线段的交并比(类似计算两个框重叠程度)
-
让网络学习整体形状,而不是孤立的点
-
实现更平滑、更连贯的车道预测
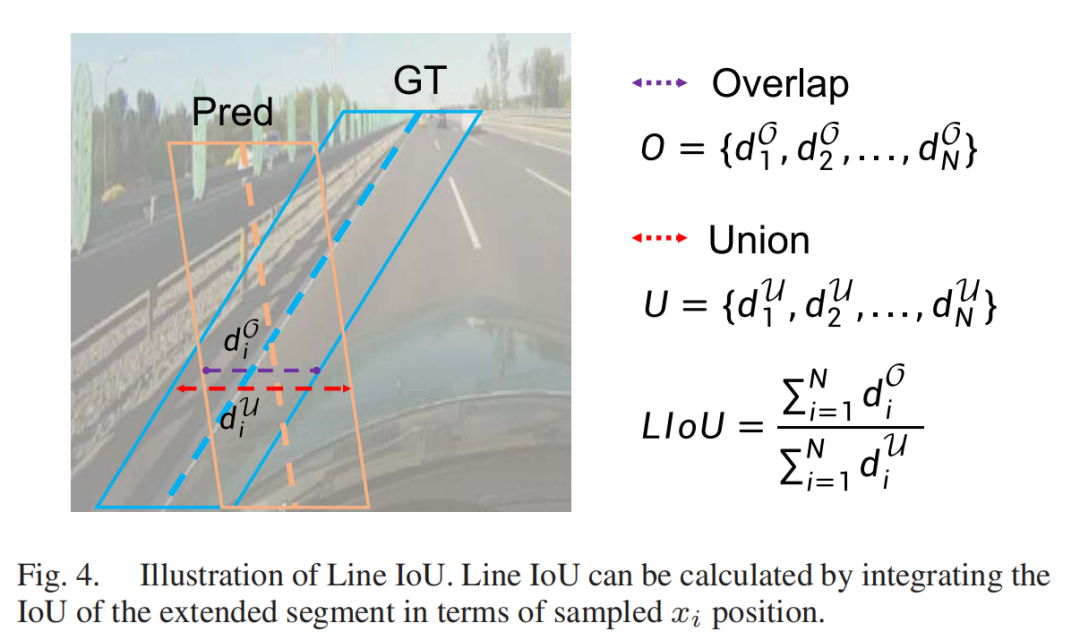
看下面的对比就知道效果多明显:用传统损失预测的车道线歪歪扭扭,而Line IoU损失能输出更贴合真实的平滑曲线。
4. 相关性判别模块:密集车道的"火眼金睛"
面对Y形分叉等密集车道,CDM模块能聪明地区分哪些是真分叉,哪些是重复预测:
-
给车道线贴标签:正常车道标0,密集车道标1、2…
-
用简单的分类器就能判断车道间的关联性
-
推理时几乎不增加计算量,实现"零成本"优化
有了CDM,AI再也不会把高速出入口的分叉车道当成重复预测删掉了,看下面的效果对比多明显:
实测性能:横扫四大数据集
研究团队在四个权威数据集上做了测试,结果可以用"横扫"来形容:
-
CULane:F1@50达到80.68,轻量版更是能跑到270 FPS(每秒处理270帧)
-
Tusimple:在这个接近饱和的数据集上,依然刷新了最先进结果
-
CurveLanes:比之前的CondLaneNet在mF1上高出6%
-
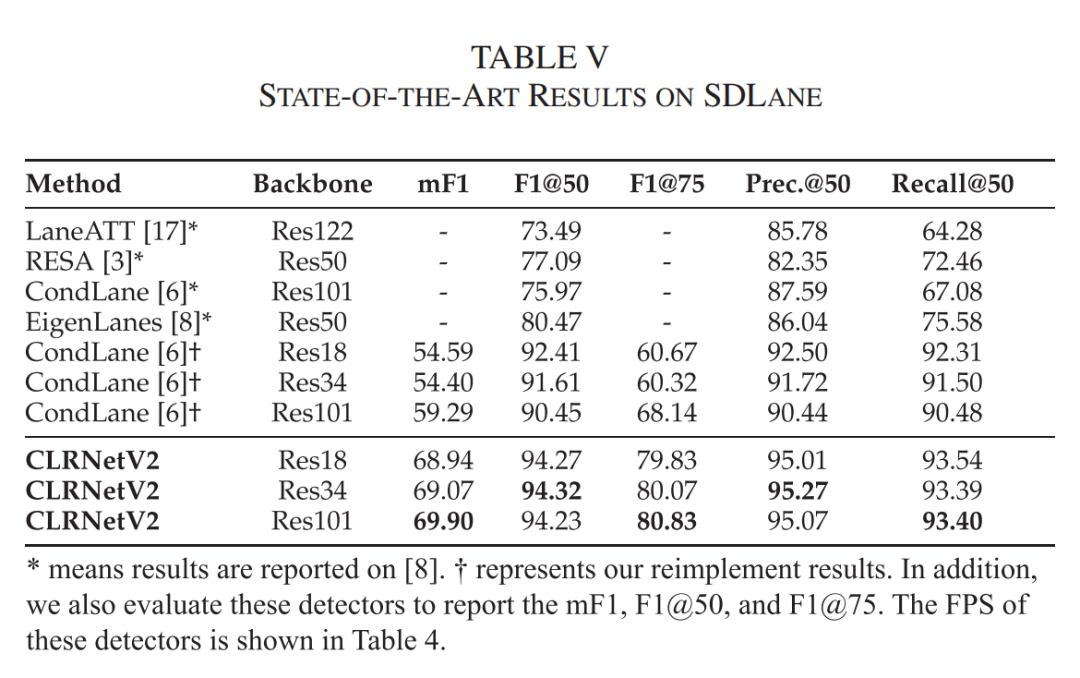
SDLane:领先第二名14个百分点,密集车道检测能力突出
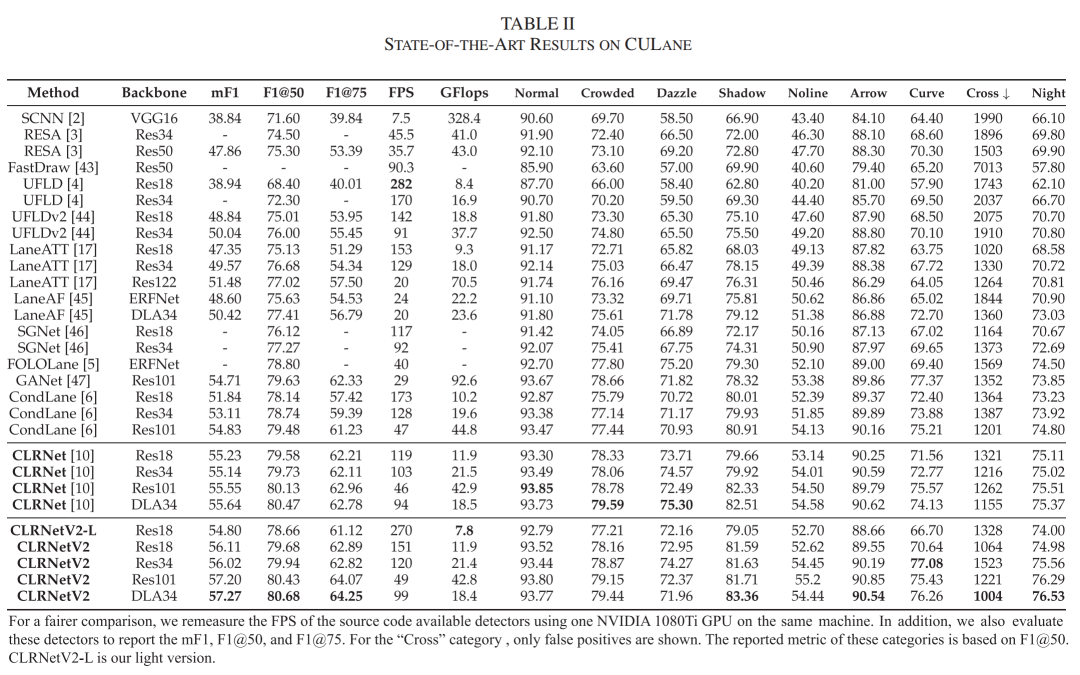
尤其值得一提的是速度表现:普通版本151 FPS,轻量版270 FPS,完全满足实时性要求,这对自动驾驶来说太重要了!
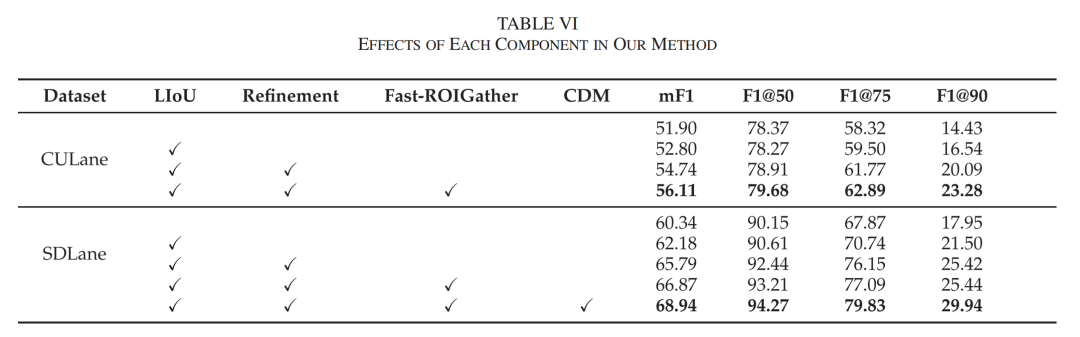
消融实验:每个模块都很能打
为了证明每个创新点的价值,团队做了详细的消融实验:
-
Line IoU损失单独就能提升1.4个mF1点
-
跨层精炼让定位精度持续提升
-
Fast-ROIGather带来1.4%的mF1提升
-
CDM在密集车道场景下提升近2个点
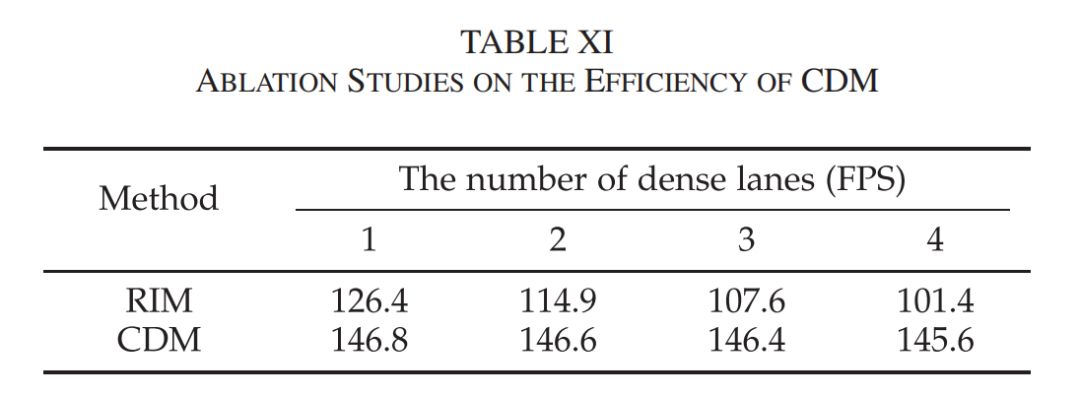
而且CDM的效率优势明显,对比CondLaneNet的RIM模块,不管密集车道数量多少,都几乎不增加推理时间:
结语:让自动驾驶更安全
CLRNetV2的出现,不仅刷新了车道检测的性能上限,更重要的是它解决了实际场景中的痛点问题:
-
跨层精炼让检测既准又细
-
Fast-ROIGather解决了视觉证据缺失难题
-
Line IoU损失让车道预测更平滑
-
CDM轻松应对密集车道场景
这些技术进步,最终都会转化为自动驾驶的安全性提升。也许在不久的将来,当我们乘坐自动驾驶汽车时,背后就有CLRNetV2在默默守护着车道安全。
想看论文原文的同学可以自行搜索标题,相信这个工作会给车道检测领域带来更多启发!
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:人工智能0基础学习攻略手册
在「小白学视觉」公众号后台回复:攻略手册,即可获取《从 0 入门人工智能学习攻略手册》文档,包含视频课件、习题、电子书、代码、数据等人工智能学习相关资源,可以下载离线学习。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~



腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 14
14 0
0- 0



 已为社区贡献178条内容
已为社区贡献178条内容

所有评论(0)