通过在Matlab/Simlink软件仿真环境下对汽车稳定控制系统的仿真可出,以横摆角速度为控制变量
通过在Matlab/Simlink软件仿真环境下对汽车稳定控制系统的仿真可出,以横摆角速度为控制变量,通过PI控制器调节质心侧偏角和横摆角速度,使得汽车始终保持在可操作的稳定状态,附带说明书
在汽车稳定控制系统的仿真中,Matlab/Simulink是一个强大的工具。我们可以通过它来模拟汽车的动态行为,特别是横摆角速度和质心侧偏角的变化。今天,我们就来聊聊如何通过PI控制器来调节这些参数,确保汽车在各种路况下都能保持稳定。
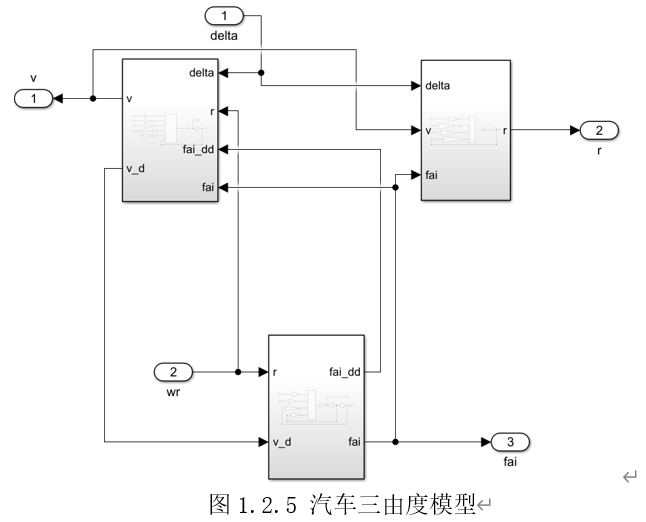
首先,我们需要建立一个基本的汽车模型。这个模型包括汽车的动力学方程,以及横摆角速度和质心侧偏角的计算。在Simulink中,我们可以使用一些现成的模块来简化这个过程。比如,使用Vehicle Body 3DOF模块来模拟汽车的三自由度运动。
% 汽车模型的基本参数
m = 1500; % 质量 (kg)
Iz = 3000; % 绕z轴的转动惯量 (kg*m^2)
a = 1.2; % 前轴到质心的距离 (m)
b = 1.6; % 后轴到质心的距离 (m)
Cf = 80000; % 前轮侧偏刚度 (N/rad)
Cr = 80000; % 后轮侧偏刚度 (N/rad)
Vx = 20; % 纵向速度 (m/s)
% 建立Simulink模型
model = 'car_stability_control';
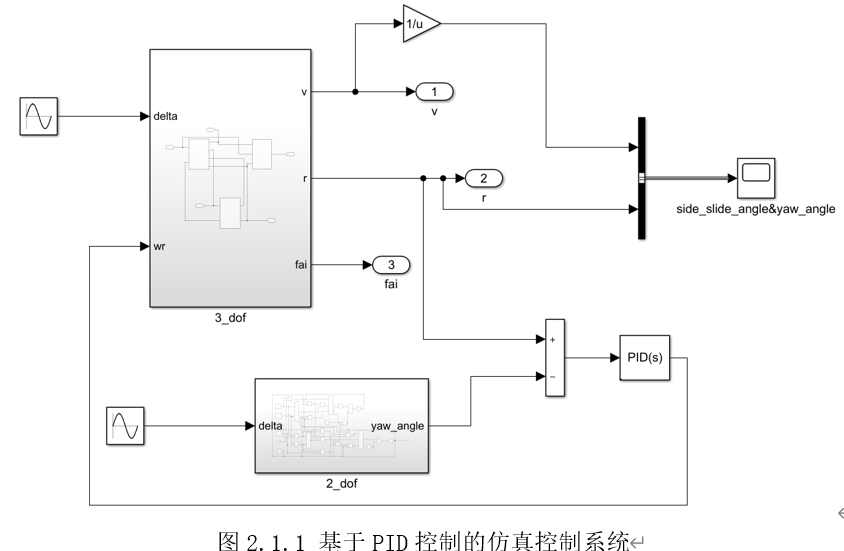
open_system(model);接下来,我们需要设计一个PI控制器来调节横摆角速度。PI控制器是一种常见的反馈控制器,它通过比例(P)和积分(I)两个部分来调整系统的输出。在这里,我们将横摆角速度作为控制变量,通过调整质心侧偏角来稳定汽车。
% PI控制器的参数
Kp = 1.5; % 比例增益
Ki = 0.1; % 积分增益
% 在Simulink中添加PI控制器
add_block('simulink/Continuous/PID Controller', [model '/PI Controller']);
set_param([model '/PI Controller'], 'P', num2str(Kp));
set_param([model '/PI Controller'], 'I', num2str(Ki));在仿真过程中,我们可以看到横摆角速度和质心侧偏角的变化。通过调整PI控制器的参数,我们可以观察到汽车在不同路况下的稳定性。比如,当汽车在湿滑路面上行驶时,横摆角速度会迅速增加,这时PI控制器会通过调整质心侧偏角来减小横摆角速度,使汽车恢复稳定。
% 运行仿真
sim(model);
% 绘制横摆角速度和质心侧偏角的变化曲线
figure;
plot(tout, yout(:,1), 'b', tout, yout(:,2), 'r');
legend('横摆角速度 (rad/s)', '质心侧偏角 (rad)');
xlabel('时间 (s)');
ylabel('值');
title('汽车稳定控制系统仿真结果');通过这种仿真,我们可以更好地理解汽车稳定控制系统的工作原理,并且在实际应用中优化控制器的参数。当然,这只是一个简单的模型,实际应用中还需要考虑更多的因素,比如轮胎的摩擦力、路面的不平度等。
总之,Matlab/Simulink为我们提供了一个强大的平台,让我们能够在虚拟环境中测试和优化汽车稳定控制系统。通过不断地调整和仿真,我们可以确保汽车在各种复杂的路况下都能保持稳定,从而提升驾驶的安全性。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)