探索 A*算法在Matlab路径规划中的奇妙之旅
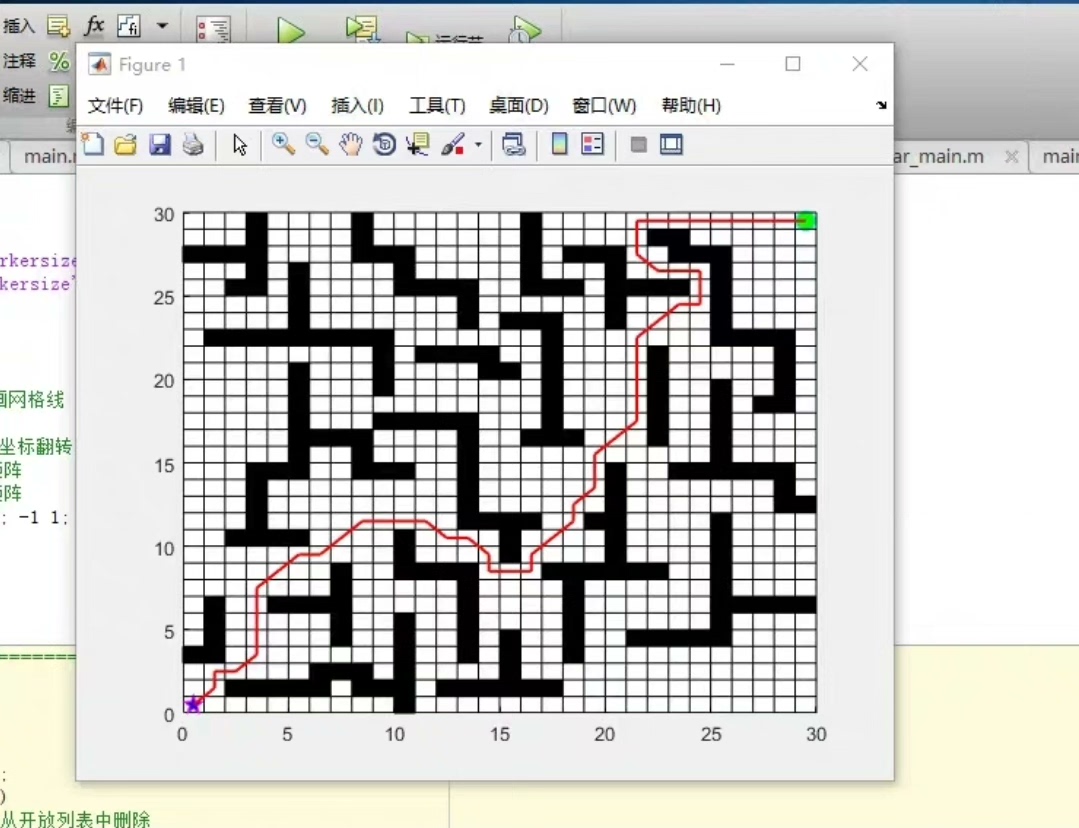
A星算法 A*算法 自己研究编写的Matlab路径规划算法 Astar算法走迷宫 可自行设置起始点,目标点,自由更换地图。 ——————————————————— 可以和人工势场法融合 动态障碍物
在路径规划的广袤领域里,A算法就像一颗璀璨的明星,闪耀着独特的光芒。最近我深入研究并编写了基于Matlab的路径规划算法,其中A算法走迷宫的实现尤其有趣,今天就来和大家分享一番。
A*算法核心原理速览
A*算法综合了Dijkstra算法的广度优先搜索特性和贪心最佳优先搜索的优点。它通过一个估值函数$f(n) = g(n) + h(n)$来评估节点,$g(n)$ 是从起点到节点 $n$ 的实际代价,$h(n)$ 是从节点 $n$ 到目标点的估计代价。通过不断选择 $f(n)$ 值最小的节点进行扩展,算法高效地朝着目标前进。
Matlab实现A*算法走迷宫
地图与节点表示
首先,我们得定义迷宫地图。在Matlab里,用一个二维矩阵就可以轻松搞定。例如:
% 定义一个简单的迷宫地图,0表示可通行,1表示障碍物
maze = [0 0 0 0 0;
0 1 0 1 0;
0 0 0 0 0;
0 1 1 1 0;
0 0 0 1 0];这里每个元素对应迷宫中的一个小方格,这样我们就有了算法施展拳脚的舞台。
节点则可以用结构体来表示,包含坐标、$g$ 值、$h$ 值和父节点信息等。
% 定义节点结构体
node = struct('x', 0, 'y', 0, 'g', 0, 'h', 0, 'parent', []);核心搜索过程
function path = astar(maze, start, goal)
openList = [];
closedList = [];
startNode = struct('x', start(1), 'y', start(2), 'g', 0, 'h', heuristic(start, goal), 'parent', []);
openList = [openList, startNode];
while ~isempty(openList)
[~, bestIndex] = min([openList.g] + [openList.h]);
currentNode = openList(bestIndex);
openList(bestIndex) = [];
if currentNode.x == goal(1) && currentNode.y == goal(2)
path = reconstructPath(currentNode);
return;
end
closedList = [closedList, currentNode];
neighbors = getNeighbors(currentNode, maze);
for i = 1:numel(neighbors)
neighbor = neighbors(i);
tentativeG = currentNode.g + 1;
inClosed = any([closedList.x] == neighbor.x & [closedList.y] == neighbor.y);
if inClosed
continue;
end
inOpen = any([openList.x] == neighbor.x & [openList.y] == neighbor.y);
if ~inOpen
neighbor.g = tentativeG;
neighbor.h = heuristic(neighbor, goal);
neighbor.parent = currentNode;
openList = [openList, neighbor];
elseif tentativeG < [openList(inOpen).g]
openList(inOpen).g = tentativeG;
openList(inOpen).parent = currentNode;
end
end
end
path = [];
end上面这段代码就是A*算法的核心搜索过程。我们从起点开始,把它加入开放列表。每次从开放列表中选取 $f$ 值最小的节点进行扩展。如果扩展到目标节点,就通过回溯父节点来重构路径。对于每个邻居节点,我们计算它的 $g$ 值,并根据它是否在开放列表或关闭列表中进行相应处理。
辅助函数
function h = heuristic(node, goal)
h = abs(node.x - goal(1)) + abs(node.y - goal(2));
end
function neighbors = getNeighbors(node, maze)
neighbors = [];
directions = [[-1, 0]; [1, 0]; [0, -1]; [0, 1]];
for i = 1:size(directions, 1)
newX = node.x + directions(i, 1);
newY = node.y + directions(i, 2);
if newX >= 1 && newX <= size(maze, 1) && newY >= 1 && newY <= size(maze, 2) && maze(newX, newY) == 0
neighbor = struct('x', newX, 'y', newY, 'g', 0, 'h', 0, 'parent', []);
neighbors = [neighbors, neighbor];
end
end
end
function path = reconstructPath(node)
path = [];
while ~isempty(node)
path = [node; path];
node = node.parent;
end
path = [path.x]';
path = [path; [path.y]'];
endheuristic 函数用来计算启发式值,这里用的是曼哈顿距离。getNeighbors 函数获取当前节点的邻居节点,确保邻居节点在地图范围内且不是障碍物。reconstructPath 函数则负责从目标节点回溯到起点,构建出最终路径。
个性化设置:起始点、目标点与地图更换
在我们的实现中,起始点、目标点和地图都可以轻松自由设置。
start = [1, 1]; % 起始点坐标
goal = [5, 5]; % 目标点坐标
maze = [0 0 0 0 0;
0 1 0 1 0;
0 0 0 0 0;
0 1 1 1 0;
0 0 0 1 0];
path = astar(maze, start, goal);你只需要修改 start、goal 和 maze 变量,就能在不同的迷宫场景中测试A*算法,这灵活性简直不要太高。
与人工势场法融合及应对动态障碍物
A*算法还可以和人工势场法融合,以更好地应对动态障碍物。人工势场法通过在环境中设置引力场和斥力场来引导路径。当有动态障碍物出现时,斥力场会实时改变,从而影响路径规划。
A星算法 A*算法 自己研究编写的Matlab路径规划算法 Astar算法走迷宫 可自行设置起始点,目标点,自由更换地图。 ——————————————————— 可以和人工势场法融合 动态障碍物
例如,我们可以在A*算法每次扩展节点时,重新计算人工势场对节点的影响,调整节点的 $g$ 值或者启发式函数 $h$ 值。
function newG = updateGwithPotentialField(node, dynamicObstacles)
% 简单示意计算斥力对g值的影响
repulsionForce = 0;
for i = 1:size(dynamicObstacles, 1)
distance = sqrt((node.x - dynamicObstacles(i, 1))^2 + (node.y - dynamicObstacles(i, 2))^2);
if distance < 5 % 假设距离小于5有斥力影响
repulsionForce = repulsionForce + 1 / distance;
end
end
newG = node.g + repulsionForce;
end在实际应用中,我们需要更精确的势场计算和融合策略,但这种简单示例展示了融合的基本思路。
总之,A算法在路径规划中有着强大的能力,无论是基础的迷宫探索,还是结合其他算法应对复杂动态环境,都值得我们深入研究和实践。希望这篇博文能让大家对A算法在Matlab路径规划中的应用有更清晰的认识,一起在算法的奇妙世界里继续探索吧!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)