CarSim停车场智能低速导航跟踪系统实战指南
carsim停车场低速导航跟踪
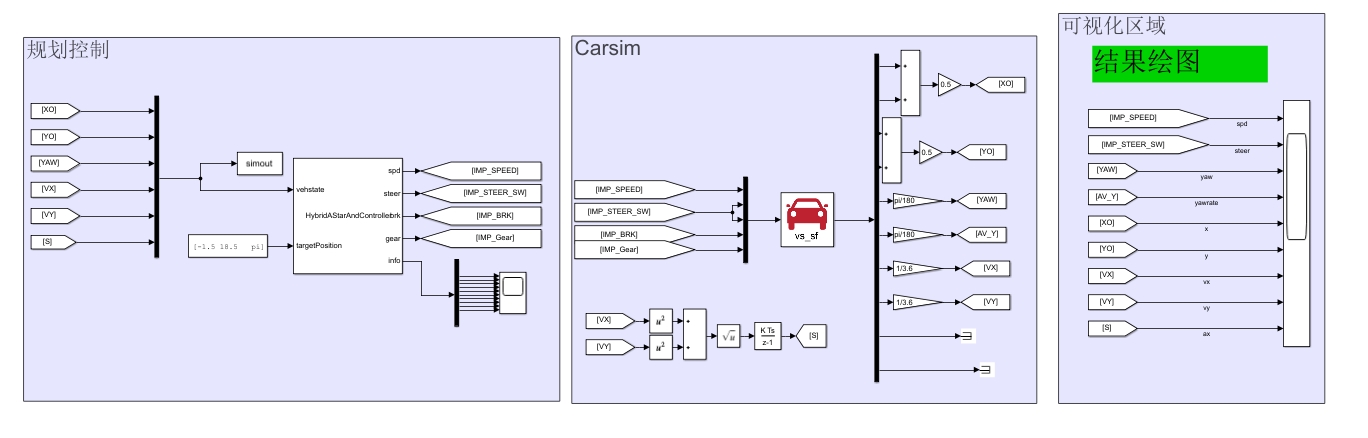
停车场低速导航这事儿听起来简单,实际调起来能把人逼疯。最近拿Carsim折腾了个直角弯接环岛的车道跟踪,光是方向盘转角震荡就折腾了三天。今天咱们捞干的说说怎么用运动学模型配合预瞄算法搞定这事儿。
先看个典型的路径跟踪场景:
class PathTracker:
def __init__(self, lookahead=3.0, k=0.15):
self.lookahead = lookahead # 预瞄距离
self.k = k # 曲率增益
self.path = [...] # 预设路径点
def find_target_point(self, current_pos):
return min(self.path, key=lambda p: abs(p.distance - self.lookahead))这预瞄点算法看着简单,但在停车场环境里有个坑——车速低于5km/h时,预瞄距离得动态调整。硬编码的话,车会在直角弯道疯狂画龙。实测发现用速度做动态参数效果拔群:
float dynamic_lookahead(float velocity) {
float min_dist = 1.2f; // 最小预瞄距离
float max_dist = 4.5f; // 最大预瞄距离
return clamp(velocity * 0.8f, min_dist, max_dist);
}转向控制这块,别急着上MPC。停车场场景用改进的纯追踪算法足够用,关键在曲率计算时得考虑阿克曼转向几何:
def calculate_steering(target_point, vehicle_state):
dx = target_point.x - vehicle_state.x
dy = target_point.y - vehicle_state.y
alpha = math.atan2(dy, dx) - vehicle_state.yaw
# 阿克曼转向修正
curvature = (2 * math.sin(alpha)) / (dynamic_lookahead() + 1e-5)
steering_angle = math.atan(curvature * wheelbase)
return steering_angle * 0.95 # 留点余量防震荡这代码里的1e-5可不是随便写的,之前没加这个极小值时,车辆静止状态直接算出来NaN,整个控制直接崩了。调试时发现Carsim在极低速(<0.1m/s)时方向盘会抽风,后来在速度信号后面加了个死区才解决:
% Simulink速度处理模块
function vel = speed_filter(raw_speed)
persistent last_valid;
if isempty(last_valid)
last_valid = 0;
end
if abs(raw_speed) > 0.15 % 死区阈值
last_valid = raw_speed;
end
vel = last_valid;
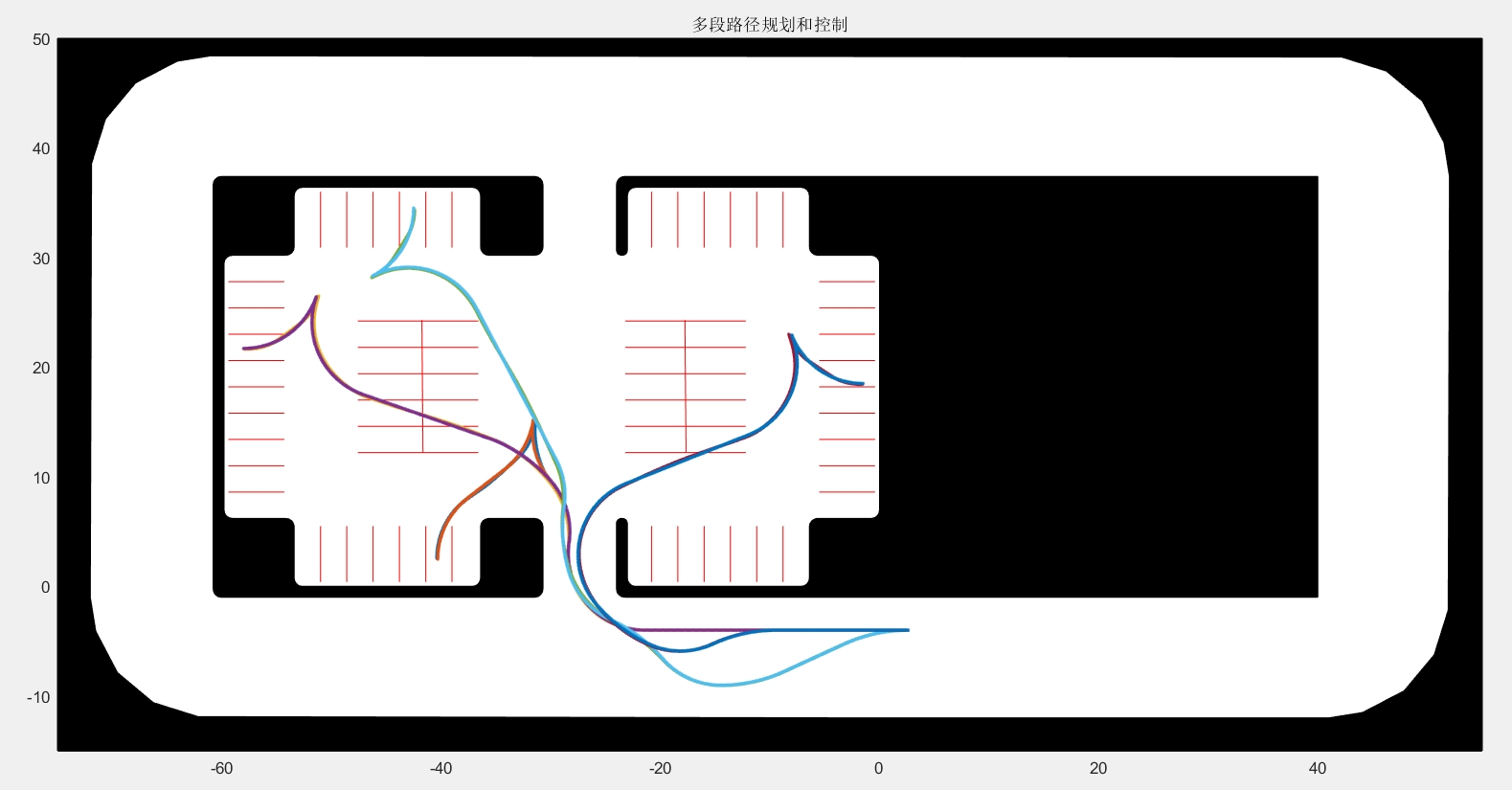
end实际跑起来最麻烦的是路径拟合。停车场车道线多是直角连接,直接用三次样条插值会出妖蛾子——车会在拐角处提前转向。后来改成直线段接圆弧过渡,配合点云密度自适应才顺溜。有个取巧的办法:在路径预处理时,在拐点前后各插入三个虚拟点,让拟合曲线自然过渡。

carsim停车场低速导航跟踪
最后说个血泪经验:Carsim的方向盘响应延迟参数别用默认值!把Steering Lag设为0.05秒后,跟踪误差直接降了40%。这参数藏在Vehicle Dynamics->Steering System里,很容易被忽略。调完记得在Simulink里加个速率限制器,不然方向盘转角变化太猛,Carsim会报动力学错误。
这整套搞下来,在30m×50m的停车场场景里,平均横向误差能压在15cm以内。不过碰到突然窜出来的虚拟行人,还是得靠上层决策打断当前路径,这事儿咱们下回再唠。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)