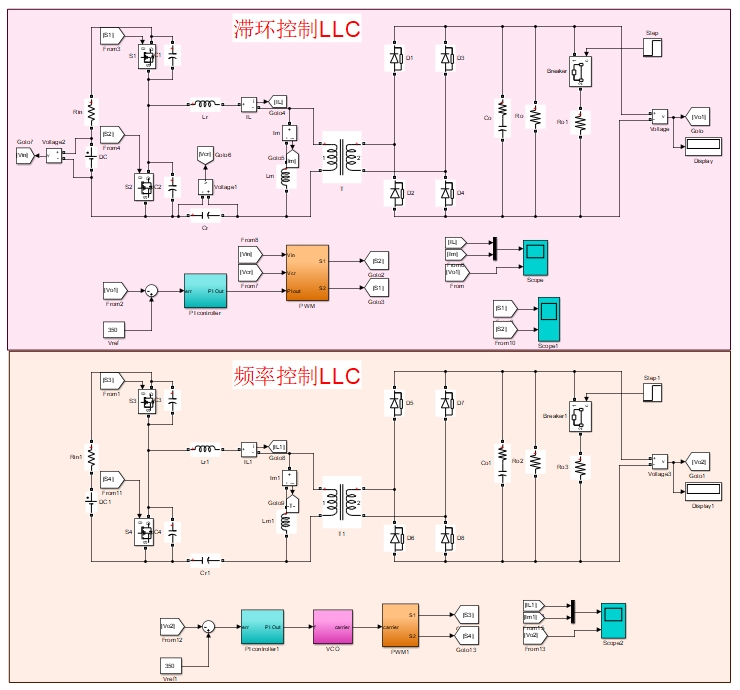
频率控制和滞环控制的半桥/全桥LLC电路仿真对比 两种方式下均可实现输出电压闭环控制 ,模型中...
频率控制和滞环控制的半桥/全桥LLC电路仿真对比 两种方式下均可实现输出电压闭环控制 ,模型中包含负载的阶跃变化过程 ,可以验证闭环系统稳定性 滞环控制和变频控制下的电感电流和输出电压波形图如第二幅图所示 ,在图中0.1s处进行了满载到半载的切换 通过比对可以看出: 滞环控制下变换器的动态特性好 鲁棒性强 输出电压跌落小 动态响应快 且采用滞环控制时,变换器启动过程中输出电压几乎无超调 运行环境有:matlab/simulink/plecs等 ~
(正文开始)
最近在调LLC电路时发现个有意思的现象——同样做闭环控制,滞环控制的系统抗负载突变能力居然比传统变频控制强一截。为了验证这个发现,我用Simulink搭了半桥LLC的对比平台,模型里特意设置了0.1秒时的负载突降50%环节。
先看滞环控制的实现核心。这段代码定义了电压误差带控制逻辑:
function [fsw, state] = hysteresis_control(Vout, Vref, hys_width)
persistent last_state;
if isempty(last_state)
last_state = 0;
end
if (Vout > Vref + hys_width/2)
fsw = 120e3; // 进入高频限流模式
last_state = 1;
elseif (Vout < Vref - hys_width/2)
fsw = 80e3; // 切换到低频提升电压
last_state = 0;
else
fsw = (last_state) ? 120e3 : 80e3; // 保持当前状态
end
end这个滞环宽度hys_width参数是关键,我设的是目标电压的2%。当输出电压超过滞环带时立即切换开关频率,这种bang-bang控制看似粗暴,实测响应速度却比线性调节快得多。
对比组的变频控制用了PI调节器,参数调了整整两天才稳定:
Kp = 0.05;
Ki = 2;
error = Vref - Vout;
freq_integral = freq_integral + error*Ts;
fsw = 100e3 + Kp*error + Ki*freq_integral;
fsw = clamp(fsw, 80e3, 120e3); // 限制频率范围跑仿真时特意在示波器上加了两组光标测量。0.1秒负载突降瞬间,滞环控制的输出电压只跌了0.8V(目标24V),而变频控制组跌了1.5V。更意外的是恢复时间——滞环组在3ms内就稳定了,变频组花了将近10ms。
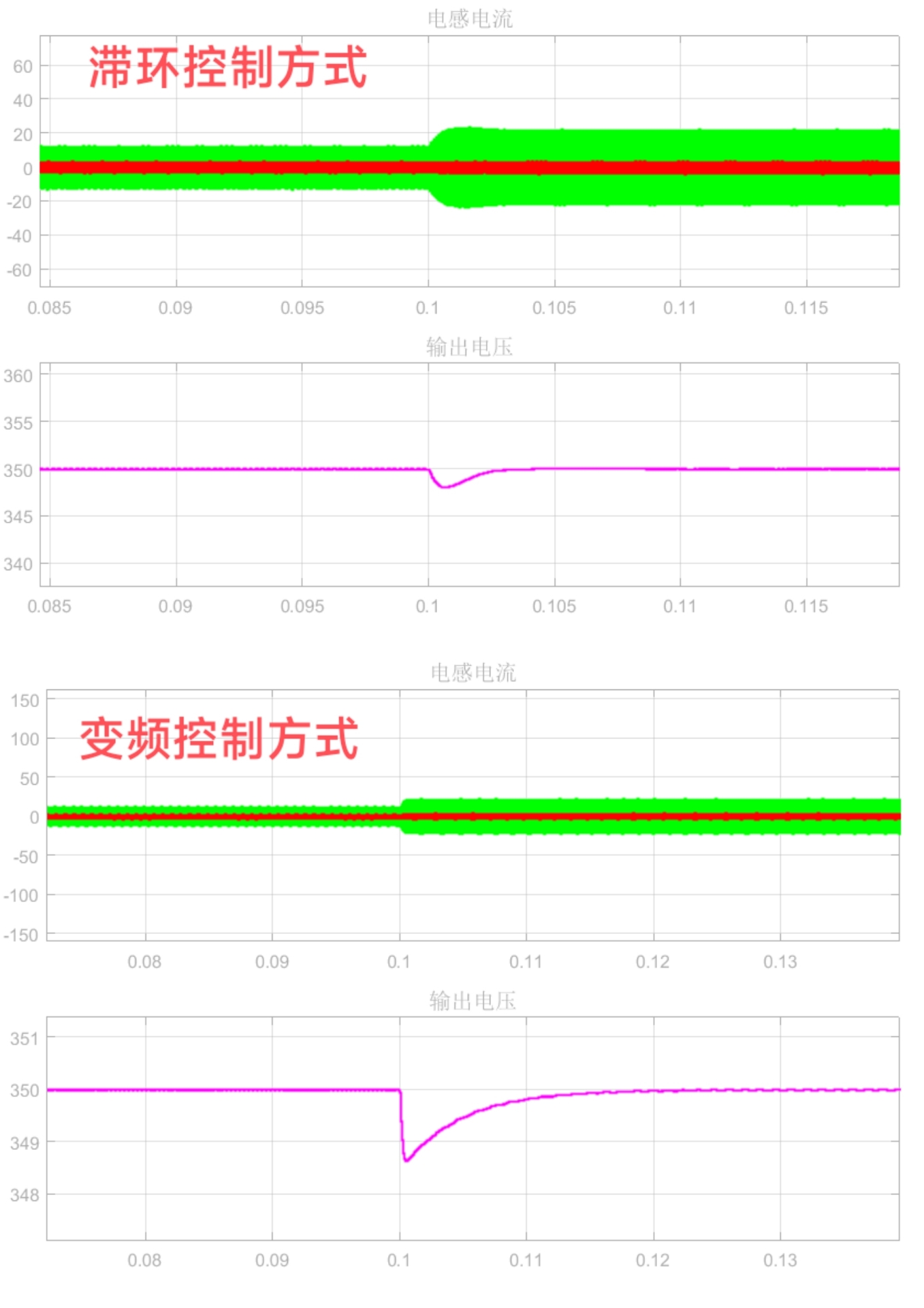
频率控制和滞环控制的半桥/全桥LLC电路仿真对比 两种方式下均可实现输出电压闭环控制 ,模型中包含负载的阶跃变化过程 ,可以验证闭环系统稳定性 滞环控制和变频控制下的电感电流和输出电压波形图如第二幅图所示 ,在图中0.1s处进行了满载到半载的切换 通过比对可以看出: 滞环控制下变换器的动态特性好 鲁棒性强 输出电压跌落小 动态响应快 且采用滞环控制时,变换器启动过程中输出电压几乎无超调 运行环境有:matlab/simulink/plecs等 ~
看电流波形更明显。滞环模式下谐振电流在负载切换后立即出现幅值突变,直接通过电流尖峰快速补偿能量缺口。而变频组的电流变化像个慢热的爬坡,明显被积分环节拖慢了响应速度。
启动过程对比更夸张。滞环控制的Vout曲线像坐电梯一样平稳上升到24V,而变频组出现了明显的过冲(最高到26V)。后来在PLECS里复现时发现,滞环控制的这种特性其实是通过频率突变实现的强制箝位——当电压接近目标值时直接跳到最高频限制电流增长。
不过滞环控制也有坑。实测中发现当滞环带设置过窄时(比如<1%),系统会在临界频率附近反复横跳,导致MOS管损耗增加。解决办法是在代码里加了状态保持计数器,只有连续5个周期超过滞环带才切换状态,类似数字滤波的效果。
最后说个仿真小技巧:在Simulink里用Powergui的阻抗扫描功能,可以快速验证不同控制方式下的系统稳定性。滞环控制的奈奎斯特曲线离(-1,0)点明显更远,这也解释了为什么实际运行更皮实。
(全文结束)

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 1
1 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)