基于PyTorch框架的图像分割项目实战:Unet、Deeplab3、FCN与Resnet的奇妙结合
图像分割语义分割unet、 deeplab3、FCN、Resnet网络等基于pytorch框架制作全套项目,包含网络模型,训练代码,预测代码,直接下载数据集就能跑,拿上就能用,简单又省事儿在计算机视觉领域,图像分割一直是个热门话题,无论是语义分割、实例分割还是全景分割,都有着广泛的应用场景,比如医学图像分析、自动驾驶中的场景理解等。
图像分割语义分割unet、 deeplab3、FCN、Resnet网络等 基于pytorch框架制作 全套项目,包含网络模型,训练代码,预测代码,直接下载数据集就能跑,拿上就能用,简单又省事儿
在计算机视觉领域,图像分割一直是个热门话题,无论是语义分割、实例分割还是全景分割,都有着广泛的应用场景,比如医学图像分析、自动驾驶中的场景理解等。今天咱就来讲讲基于PyTorch框架,用Unet、Deeplab3、FCN这些经典网络模型,搭配Resnet骨干网络,制作一个超实用的图像分割全套项目,真的是直接下载数据集就能跑,简单省事儿。
一、网络模型
(一)Unet
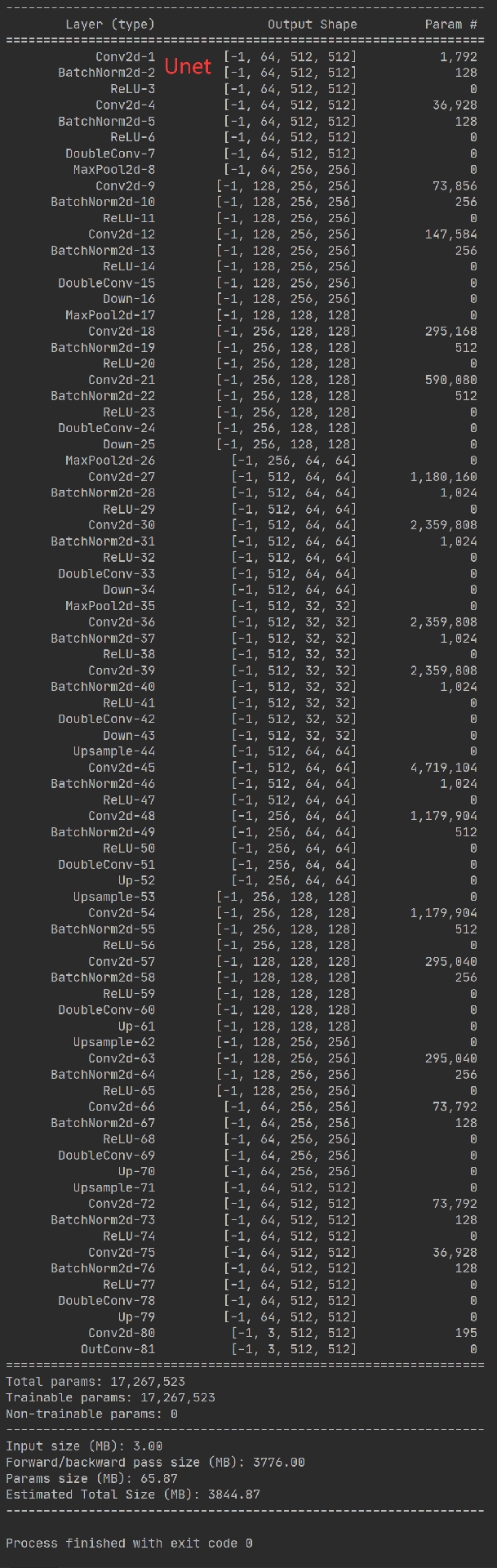
Unet是医学图像分割领域的明星模型,它的结构就像个U字,非常有特点。它由收缩路径(下采样)和扩张路径(上采样)组成。下采样部分不断提取图像的特征,让特征图变小但特征维度变高;上采样部分则把小的特征图还原回原图大小,同时结合下采样过程中的特征,以实现精确的分割。
下面是一个简单的Unet部分代码示例(简化版,仅展示核心结构思路):
import torch
import torch.nn as nn
class DoubleConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(DoubleConv, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.conv(x)
class Down(nn.Module):
def __init__(self, in_channels, out_channels):
super(Down, self).__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(kernel_size=2, stride=2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
class Up(nn.Module):
def __init__(self, in_channels, out_channels, bilinear=True):
super(Up, self).__init__()
if bilinear:
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
else:
self.up = nn.ConvTranspose2d(in_channels // 2, in_channels // 2, kernel_size=2, stride=2)
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
x1 = self.up(x1)
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = nn.functional.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x2, x1], dim=1)
return self.conv(x)
class OutConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)
class UNet(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=True):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
factor = 2 if bilinear else 1
self.down4 = Down(512, 1024 // factor)
self.up1 = Up(1024, 512 // factor, bilinear)
self.up2 = Up(512, 256 // factor, bilinear)
self.up3 = Up(256, 128 // factor, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits(二)Deeplab3
Deeplab3是语义分割中很厉害的模型,它主要利用空洞卷积(也叫扩张卷积)来增大感受野,同时还引入了空洞空间金字塔池化(ASPP)模块,从不同尺度提取特征,以更好地处理不同大小的物体。
图像分割语义分割unet、 deeplab3、FCN、Resnet网络等 基于pytorch框架制作 全套项目,包含网络模型,训练代码,预测代码,直接下载数据集就能跑,拿上就能用,简单又省事儿
下面是ASPP模块的简单代码:
class ASPP(nn.Module):
def __init__(self, in_channels, out_channels, atrous_rates):
super(ASPP, self).__init__()
self.aspp = nn.ModuleList([
nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, dilation=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
),
nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=atrous_rates[0],
dilation=atrous_rates[0], bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
),
nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=atrous_rates[1],
dilation=atrous_rates[1], bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
),
nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=atrous_rates[2],
dilation=atrous_rates[2], bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
])
self.global_pooling = nn.Sequential(
nn.AdaptiveAvgPool2d((1, 1)),
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
self.conv1 = nn.Conv2d(5 * out_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.dropout = nn.Dropout(0.5)
def forward(self, x):
x1 = self.aspp[0](x)
x2 = self.aspp[1](x)
x3 = self.aspp[2](x)
x4 = self.aspp[3](x)
x5 = self.global_pooling(x)
x5 = nn.functional.interpolate(x5, size=x.size()[2:], mode='bilinear', align_corners=True)
x = torch.cat((x1, x2, x3, x4, x5), dim=1)
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
return self.dropout(x)(三)FCN
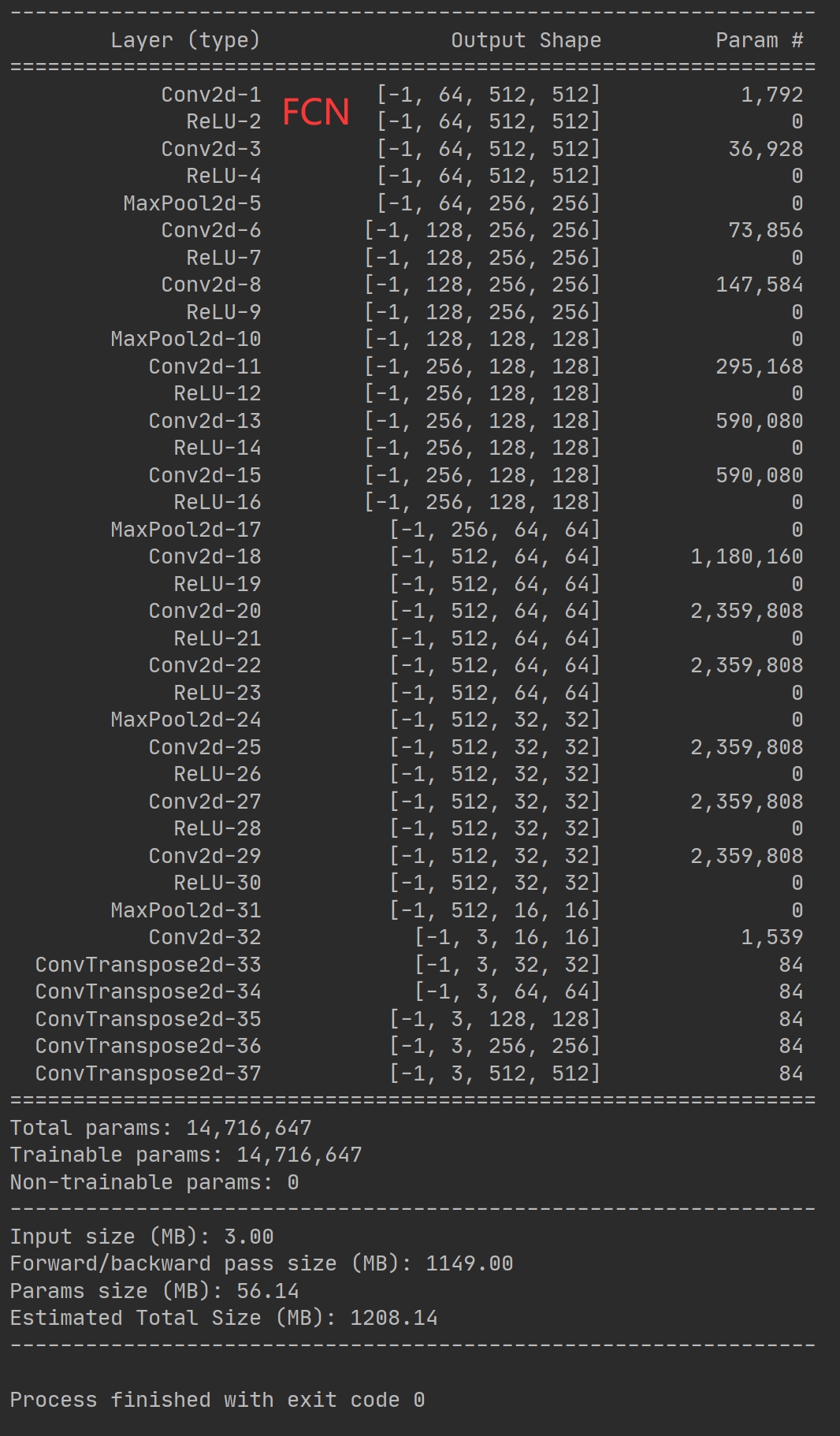
全卷积网络(FCN)开创了端到端的语义分割先河,它把传统卷积网络最后的全连接层换成卷积层,直接输出分割结果。这样可以对任意大小的图像进行处理,不像传统方法需要对图像进行裁剪或变形。
class FCN(nn.Module):
def __init__(self, num_classes):
super(FCN, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
# 更多卷积层和池化层,这里省略部分
)
self.score_fr = nn.Conv2d(512, num_classes, kernel_size=1)
self.upscore = nn.ConvTranspose2d(num_classes, num_classes, kernel_size=64, stride=32, bias=False)
def forward(self, x):
x = self.features(x)
x = self.score_fr(x)
x = self.upscore(x)
x = x[:, :, 19:19 + x.size()[2], 19:19 + x.size()[3]].contiguous()
return x(四)Resnet
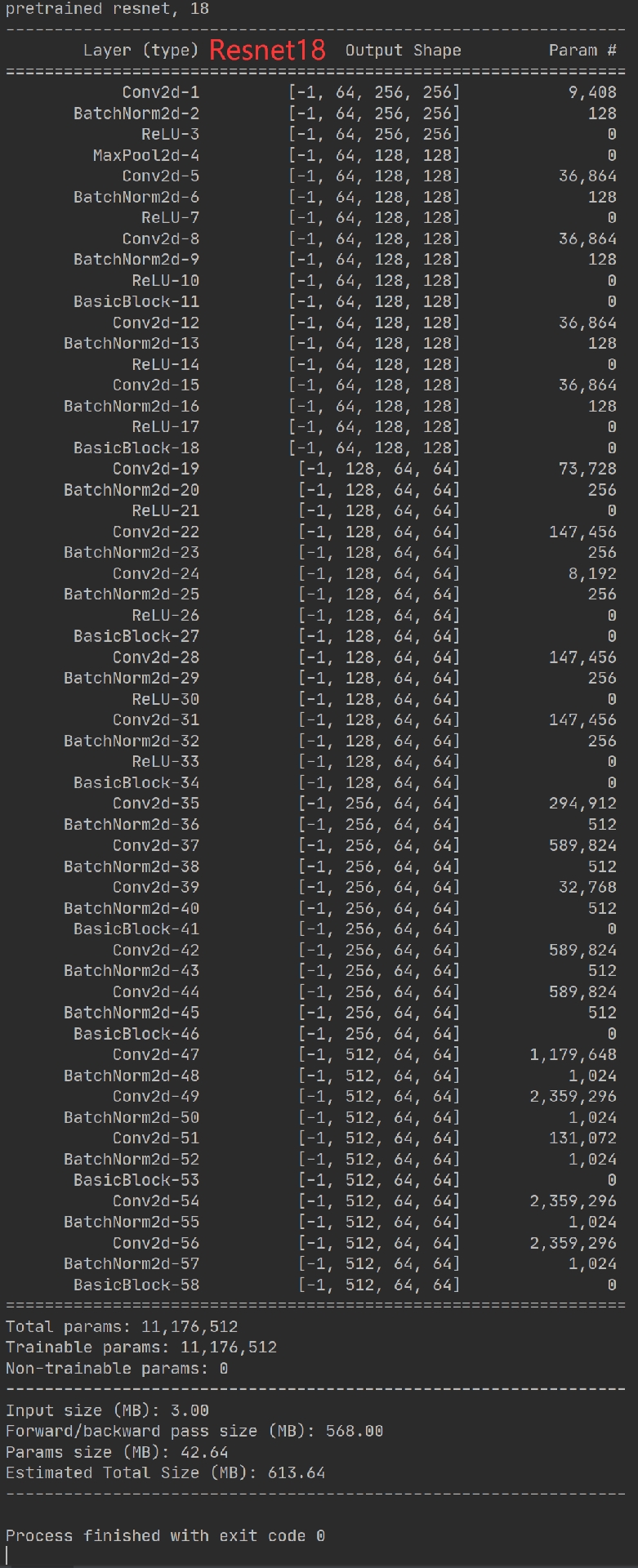
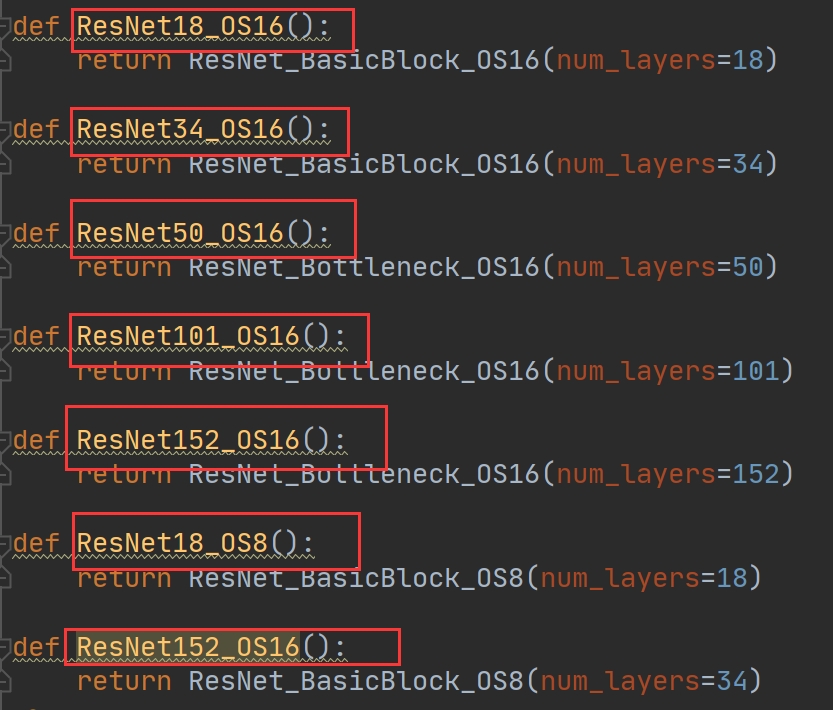
Resnet解决了深度神经网络训练过程中的梯度消失和梯度爆炸问题,它通过引入残差块,让网络可以学习到残差映射,使得训练深层网络变得更容易。Resnet常被用作其他模型的骨干网络,像在Unet、Deeplab3和FCN中,替换原来的普通卷积层,能提升模型的性能。
下面是一个简单的Resnet残差块代码:
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.downsample = None
if stride!= 1 or in_channels!= out_channels:
self.downsample = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out二、训练代码
训练代码是让模型学习数据特征的关键部分。我们首先要加载数据集,这里假设使用的是标准的图像分割数据集格式,比如VOC格式。
from torchvision import transforms, datasets
from torch.utils.data import DataLoader
transform = transforms.Compose([
transforms.Resize((256, 256)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
train_dataset = datasets.VOCSegmentation(root='./data', year='2012', image_set='train',
download=True, transform=transform)
train_loader = DataLoader(train_dataset, batch_size=4, shuffle=True)接下来定义损失函数和优化器,以Unet模型为例:
import torch.optim as optim
import torch.nn.functional as F
model = UNet(n_channels=3, n_classes=21)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
for epoch in range(10):
running_loss = 0.0
for i, data in enumerate(train_loader, 0):
inputs, labels = data['image'], data['segmentation']
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, labels.long())
loss.backward()
optimizer.step()
running_loss += loss.item()
print(f'Epoch {epoch + 1}, Loss: {running_loss / len(train_loader)}')三、预测代码
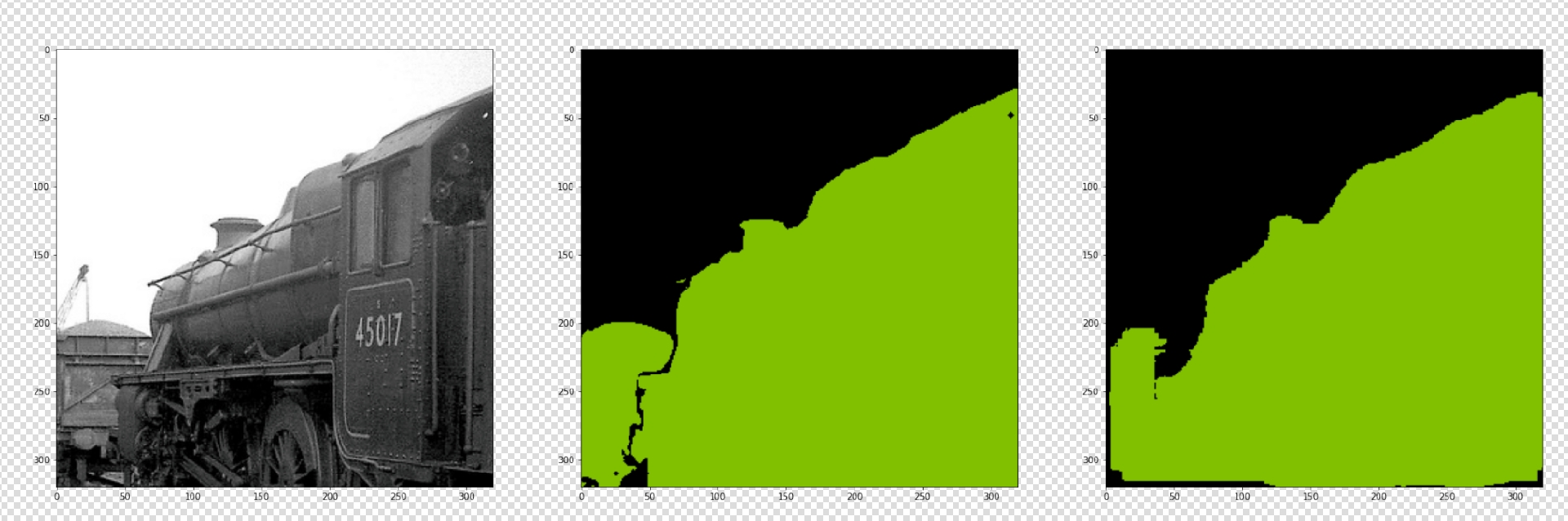
预测代码用于使用训练好的模型对新的图像进行分割预测。
import cv2
import numpy as np
from torchvision import transforms
def predict_image(model, image_path):
img = cv2.imread(image_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
transform = transforms.Compose([
transforms.Resize((256, 256)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
img = transform(img).unsqueeze(0)
with torch.no_grad():
output = model(img)
prediction = torch.argmax(output, dim=1).squeeze().numpy()
prediction = np.array(prediction * 255 / np.max(prediction), dtype=np.uint8)
prediction = cv2.resize(prediction, (img.shape[3], img.shape[2]), interpolation=cv2.INTER_NEAREST)
return prediction
model = UNet(n_channels=3, n_classes=21)
model.load_state_dict(torch.load('unet_model.pth'))
model.eval()
prediction = predict_image(model, 'test_image.jpg')
cv2.imwrite('prediction.png', prediction)以上就是基于PyTorch框架,结合Unet、Deeplab3、FCN和Resnet网络制作图像分割项目的主要内容啦,整套项目代码简单易懂,数据集下载就能跑起来,无论是初学者学习图像分割,还是老手快速搭建应用,都非常方便,赶紧动手试试吧!


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 32
32 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)