欠驱动无人艇路径跟踪控制 MATLAB 仿真全解析
欠驱动无人艇路径跟踪控制 MATLAB仿真包含程序运行说明,参考论文,主程序。
在无人艇研究领域,欠驱动无人艇的路径跟踪控制是一个关键课题。MATLAB 凭借其强大的数值计算和可视化功能,成为我们进行相关仿真研究的得力工具。今天就来详细聊聊欠驱动无人艇路径跟踪控制的 MATLAB 仿真,涵盖程序运行说明、参考论文以及主程序。
参考论文的重要性
在深入代码之前,不得不提参考论文。它们是我们理解问题本质和相关控制算法的基石。通过研读前沿论文,我们能掌握到最新的控制策略,比如滑模控制、模型预测控制等在欠驱动无人艇路径跟踪中的应用。例如,[某经典论文名称]详细阐述了基于非线性模型的自适应滑模控制方法,为无人艇在复杂海洋环境下的路径跟踪提供了有效方案。论文不仅推导了理论算法,还给出了实际的实验验证,这对我们构建 MATLAB 仿真模型有极大的指导意义。
程序运行说明
- 环境搭建
首先,确保你的 MATLAB 环境安装完整。如果涉及到一些特定的工具箱,比如控制系统工具箱(Control System Toolbox),要提前安装好。这就好比我们要搭建一个实验室,各种工具得准备齐全。在 MATLAB 命令行输入 ver 可以查看已安装的工具箱列表,如下代码示例:
ver- 数据准备
路径跟踪控制仿真需要一些初始数据,比如无人艇的初始位置、速度,目标路径的设定等。我们可以将这些数据保存在一个 .mat 文件中,方便后续程序调用。假设我们要设定无人艇初始位置为 [0, 0],速度为 1 m/s,目标路径是一个圆形,代码如下:
% 保存初始数据
initial_x = 0;
initial_y = 0;
initial_speed = 1;
radius = 5; % 圆形路径半径
theta = 0:0.01:2*pi;
target_x = radius * cos(theta);
target_y = radius * sin(theta);
save('initial_data.mat', 'initial_x', 'initial_y', 'initial_speed', 'target_x', 'target_y');- 运行主程序
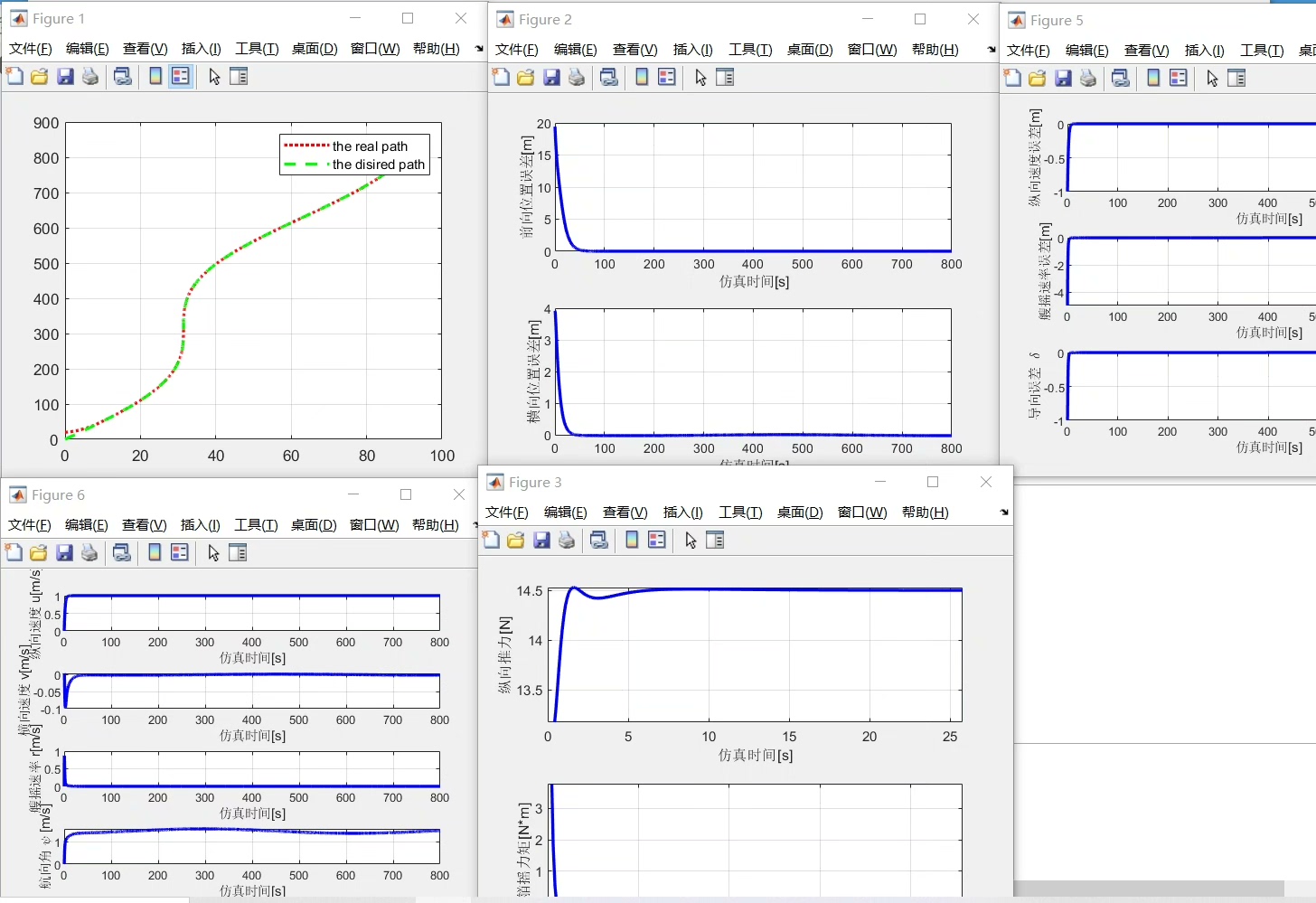
准备好数据和环境后,运行主程序。主程序会读取初始数据,根据选择的控制算法计算无人艇的控制输入,从而实现路径跟踪。运行主程序后,MATLAB 会生成各种结果,比如无人艇实际行驶路径的绘图,与目标路径的对比等。
主程序详解
下面给出一个简单的基于 PID 控制的欠驱动无人艇路径跟踪主程序示例:
% 加载初始数据
load('initial_data.mat');
% 定义参数
dt = 0.1; % 时间步长
time = 0:dt:100;
num_steps = length(time);
% 初始化无人艇状态
x = zeros(num_steps, 1);
y = zeros(num_steps, 1);
v = zeros(num_steps, 1);
x(1) = initial_x;
y(1) = initial_y;
v(1) = initial_speed;
% PID 控制器参数
kp = 0.5;
ki = 0.1;
kd = 0.05;
integral = 0;
prev_error = 0;
for k = 2:num_steps
% 计算当前时刻目标点
target_index = ceil(k * length(target_x) / num_steps);
target_x_k = target_x(target_index);
target_y_k = target_y(target_index);
% 计算位置误差
error_x = target_x_k - x(k - 1);
error_y = target_y_k - y(k - 1);
error = sqrt(error_x^2 + error_y^2);
% PID 控制计算
integral = integral + error * dt;
derivative = (error - prev_error) / dt;
control_input = kp * error + ki * integral + kd * derivative;
% 更新无人艇状态
v(k) = v(k - 1) + control_input * dt;
x(k) = x(k - 1) + v(k) * cos(atan2(error_y, error_x)) * dt;
y(k) = y(k - 1) + v(k) * sin(atan2(error_y, error_x)) * dt;
prev_error = error;
end
% 绘图
figure;
plot(target_x, target_y, 'b--', 'DisplayName', 'Target Path');
hold on;
plot(x, y, 'r-', 'DisplayName', 'Actual Path');
legend;
xlabel('X - position (m)');
ylabel('Y - position (m)');
title('Under - actuated Unmanned Surface Vehicle Path Tracking');这段主程序首先加载之前保存的初始数据。然后定义了一些仿真参数,比如时间步长 dt,并初始化无人艇的位置 x、y 和速度 v。接着设置了 PID 控制器的参数 kp、ki、kd。在循环中,程序不断计算当前时刻无人艇与目标点的位置误差,通过 PID 控制器计算控制输入,进而更新无人艇的速度和位置。最后,程序将目标路径和无人艇实际行驶路径绘制出来,方便直观地观察路径跟踪效果。
欠驱动无人艇路径跟踪控制 MATLAB仿真包含程序运行说明,参考论文,主程序。
通过这样一套流程,我们就能在 MATLAB 中完成欠驱动无人艇路径跟踪控制的仿真,无论是研究新算法还是优化现有策略,都能基于此进行深入探索。希望大家在这个有趣的领域中取得更多成果!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 21
21 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)