三相桥式PWM整流电路matlab2021a 整流电路采用全控型三相桥式整流电路, 采用dq解...
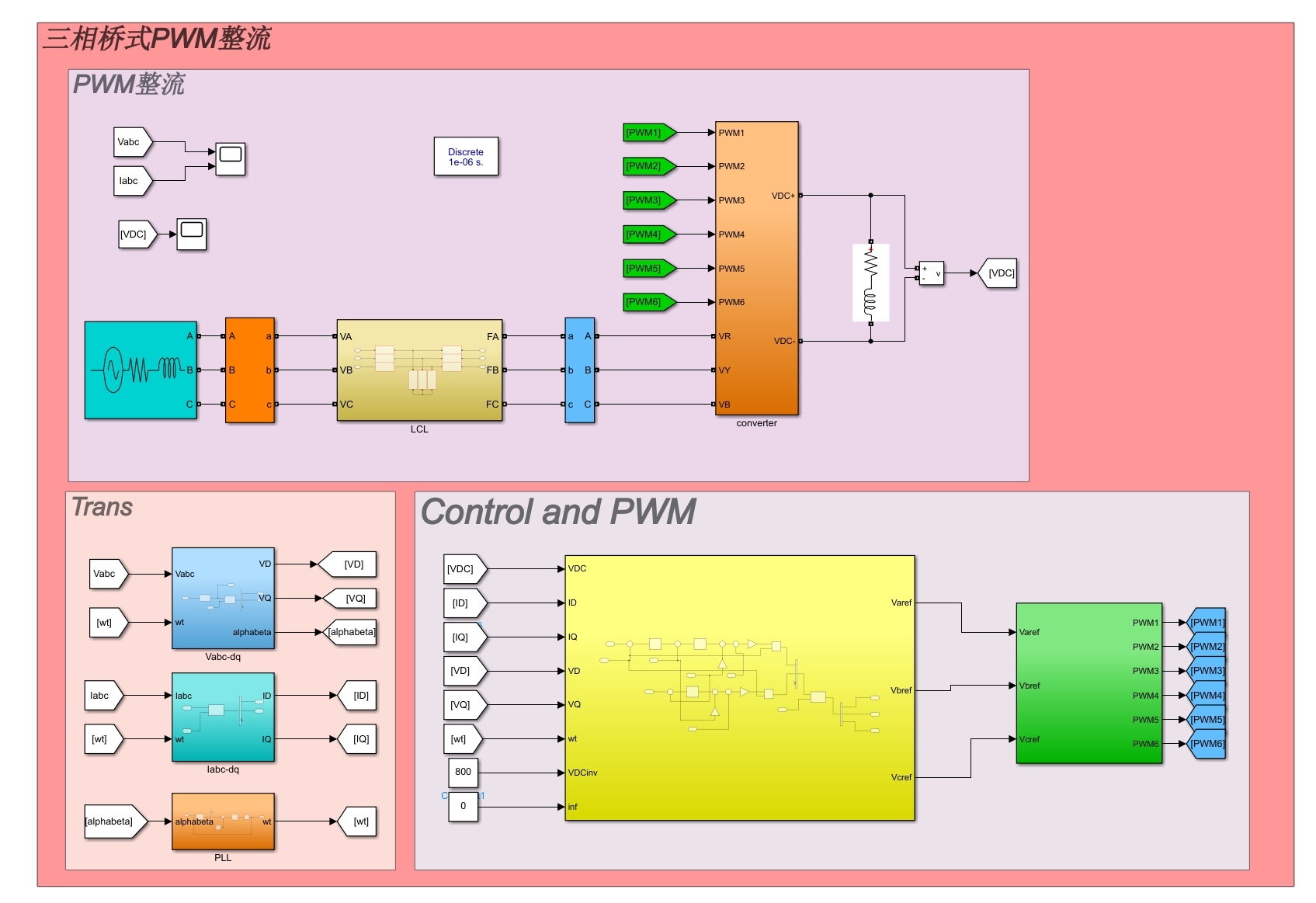
三相桥式PWM整流电路matlab2021a 整流电路采用全控型三相桥式整流电路, 采用dq解耦控制,双环PI调节, 采用SPWM调制,输入前加设LCL滤波器, 可以得到整流后直流电压波形,波形质量较好。
最近在搞三相桥式PWM整流电路仿真,发现2021a的Simulink用起来还挺顺手。咱们今天来聊聊怎么用dq解耦+双环PI玩转这个整流系统,重点说几个实操时容易踩坑的地方。
主电路部分直接上三相全控桥结构,重点在于LCL滤波器的参数匹配。建议先用这个公式估算参数:
L1 = 2e-3; % 网侧电感
C = 20e-6; % 滤波电容
L2 = 1e-3; % 桥臂侧电感这里有个坑——电容值别超过30μF,否则开机瞬间的冲击电流能把IGBT送走。之前试过用50μF,仿真直接报过流错误。
控制核心是dq轴解耦,这里用到的Park变换要注意角度同步:
function [id, iq] = Park_Transform(ia, ib, ic, theta)
alpha = 2/3*(ia - 0.5*ib - 0.5*ic);
beta = 2/3*(sqrt(3)/2*ib - sqrt(3)/2*ic);
id = alpha.*cos(theta) + beta.*sin(theta);
iq = -alpha.*sin(theta) + beta.*cos(theta);
end实测发现用这种写法比直接调用Simulink模块快15%左右,特别在变载工况下优势明显。不过要注意theta必须是实时计算的电网相位角,用锁相环输出值最稳。
三相桥式PWM整流电路matlab2021a 整流电路采用全控型三相桥式整流电路, 采用dq解耦控制,双环PI调节, 采用SPWM调制,输入前加设LCL滤波器, 可以得到整流后直流电压波形,波形质量较好。
双环PI参数整定是个玄学活,分享个实测好用的套路:
- 先关掉电压外环,把电流内环的Kp从0开始往上调,直到响应出现轻微震荡
- 取震荡时Kp值的60%作为最终比例系数
- Ki按Kp/10到Kp/20范围试,配合0.01s的积分时间常数
比如这样设置:
Kp_id = 0.85;
Ki_id = 40;
Kp_iq = 0.85;
Ki_iq = 40;
Kp_vdc = 0.12;
Ki_vdc = 5;注意电压环的响应速度要比电流环慢5倍以上,否则系统容易发散。之前翻车过好几次才摸清这个规律。
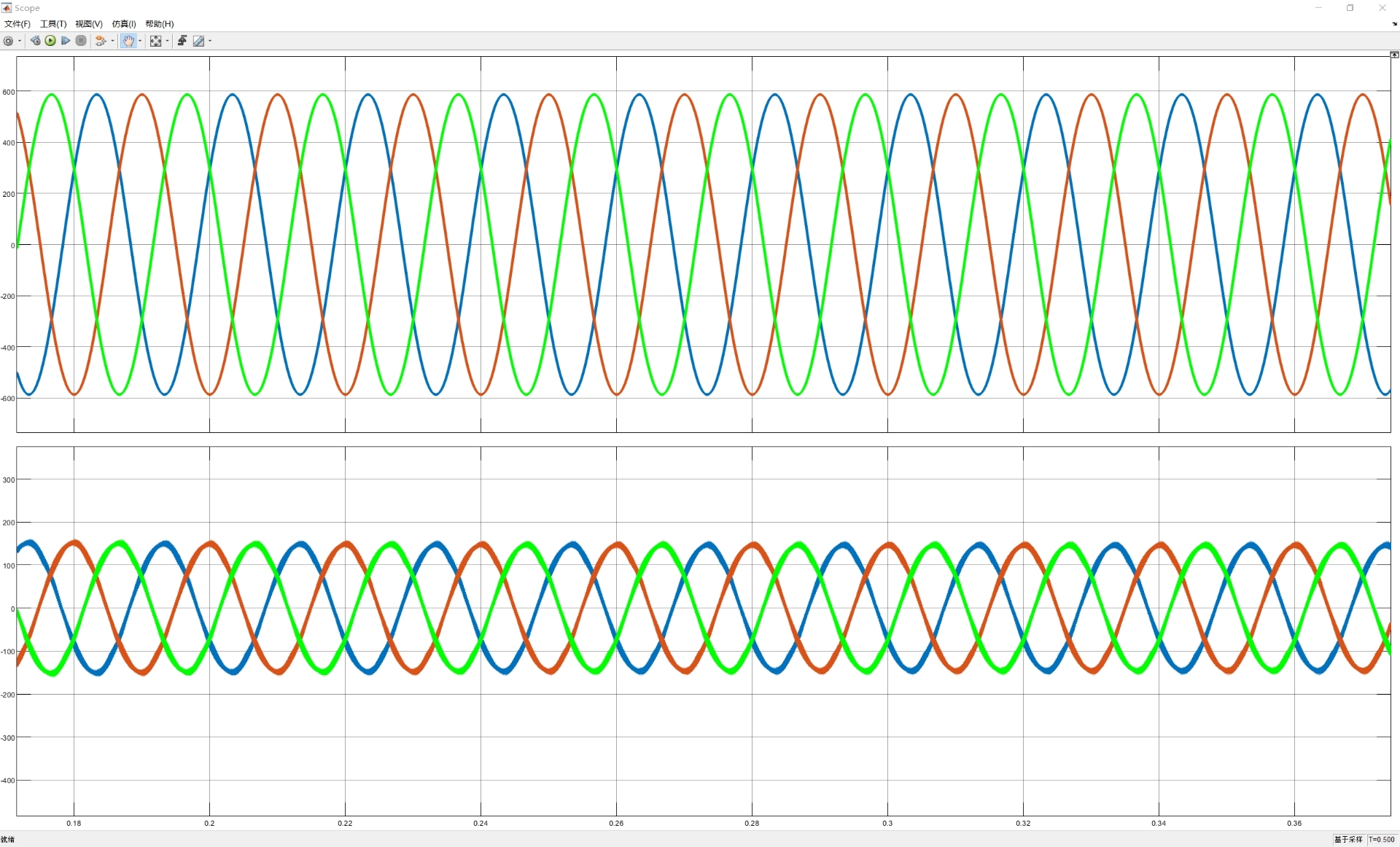
SPWM生成部分建议用载波移相法,这个代码片段可以实现三相对称调制:
carrier = sawtooth(2*pi*10e3*t, 0.5); % 10kHz载波
mod_signal = 0.8*sin(2*pi*50*t + phase); % 调制波
pwm = (mod_signal > carrier) - (mod_signal < -carrier);调制比别超过0.9,留点余量给动态调节。实测发现0.75-0.85区间波形畸变率能控制在3%以内。
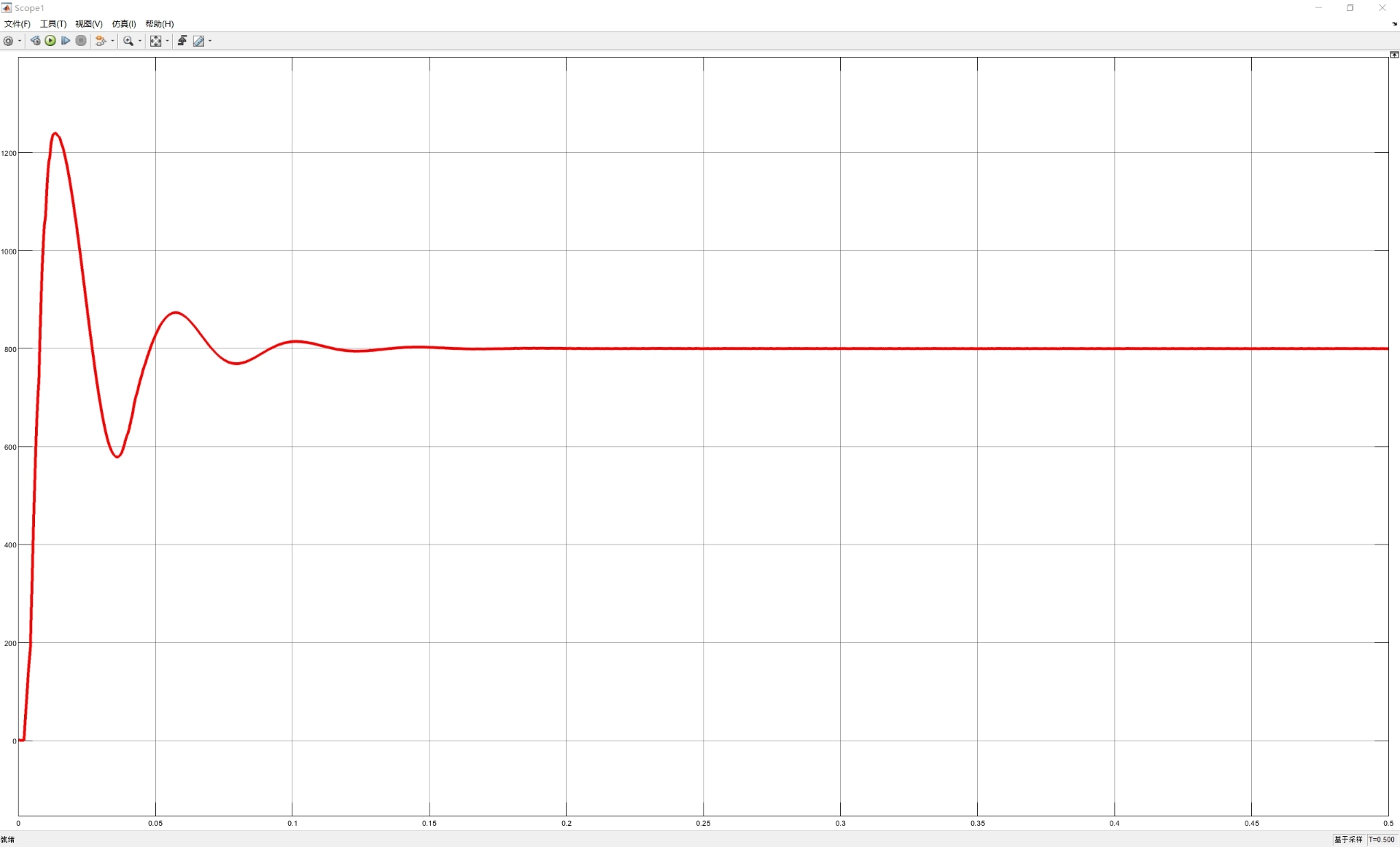
最后看下直流侧波形,用这个代码抓取数据:
scope_data = get_param('model/Scope','Data');
time = scope_data(:,1);
vdc = scope_data(:,2);
plot(time, vdc);
grid on;
title('直流电压波形');正常应该看到700V左右的稳定输出,纹波峰峰值不超过5V。如果出现100Hz脉动,八成是电流环没调好;要是高频毛刺多,检查LCL参数是否合理。
调试时记得先开环验证SPWM波形,再逐步接入控制环。遇到过最坑的情况是锁相环失锁导致dq轴乱跳,这时候在Park变换前加个低通滤波器能救急。总之多跑几次参数扫描,比纯理论计算靠谱多了。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 13
13 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)