OpenCV3
课时21:均值化原理_笔记
直方图均衡化
掩码操作
示例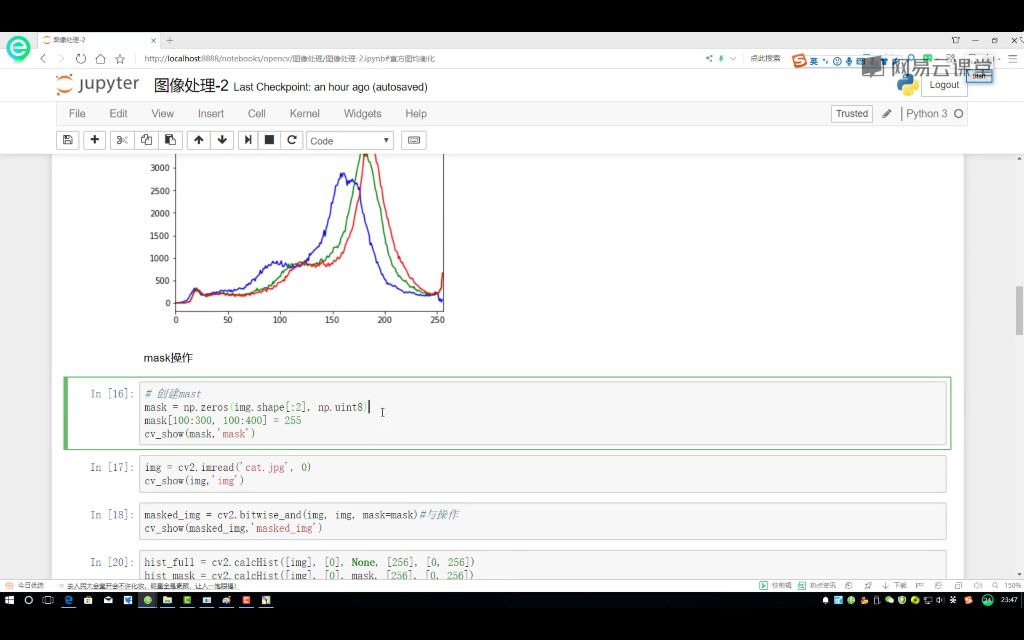
创建方法
使用 np.zeros(img.shape[:2], np.uint8) 创建与图像大小相同的二维零矩阵。
将需要保留的区域设置为 255:mask[100:300, 100:400] = 255。
注意图像大小要保持一致,使用 img.shape 获取原图尺寸。
操作原理
掩码只有两部分组成:0(黑色)和 255(白色)。
通过 cv2.bitwise_and() 执行与操作,保留掩码为 255 的区域。
黑色区域(0 值)会被完全过滤掉,相当于图像截取操作。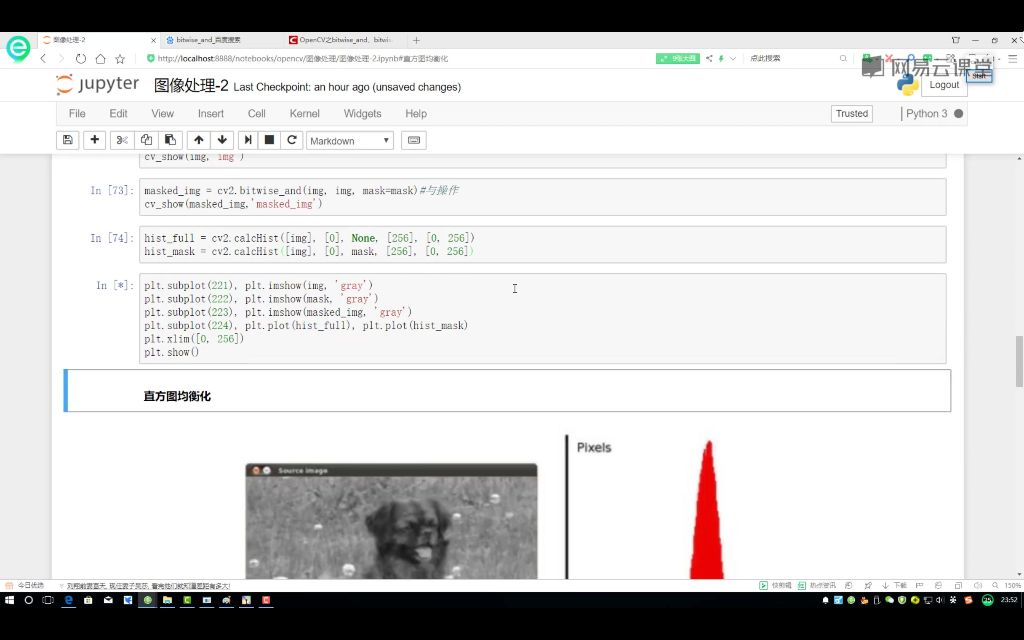
效果展示
原始图像:完整的灰度图。
掩码图像:黑白分明的矩形区域。
处理后图像:只保留掩码白色区域的图像内容。
直方图对比:显示原始图像和掩码区域的像素分布差异。
直方图均衡化的基本原理
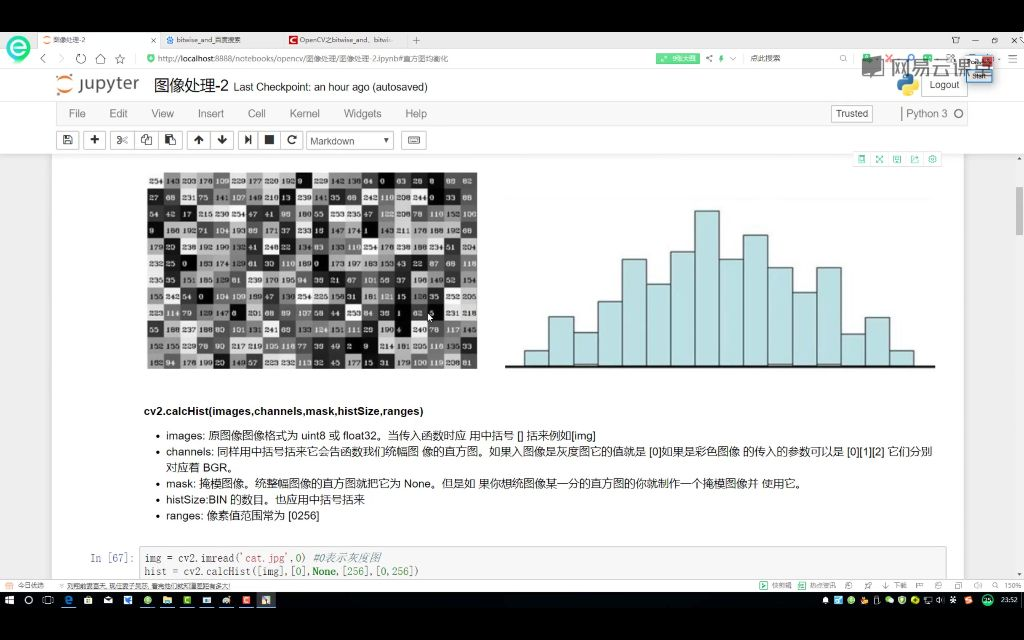
统计函数cv2.calcHist(images, channels, mask, histSize, ranges)
images:需用中括号包裹,如[img]。channels:灰度图为[0],彩色图可分别统计 BGR 通道[0][1][2]。mask:None表示统计整图,使用掩码可统计特定区域。histSize:BIN 数目,如[256]。ranges:像素值范围,通常为[0,256]。
例题:直方图均衡化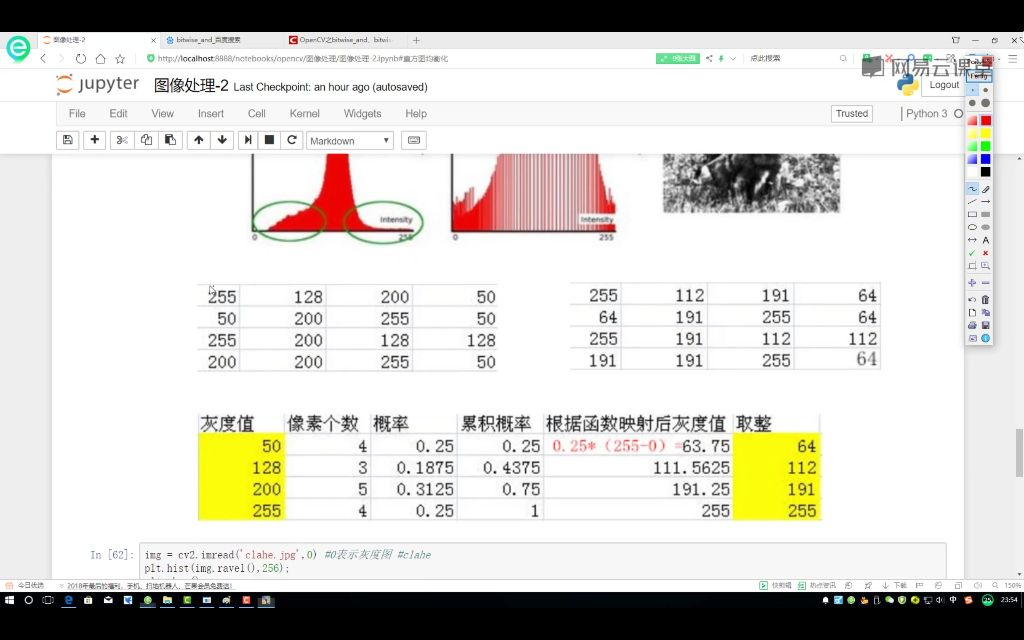
计算步骤
统计各灰度值的像素个数。
计算每个灰度值的概率。
计算累积概率。
映射新灰度值。
示例解析
原始灰度值 50(4 个像素)→ 累积概率 0.25 → 新值 64。
灰度值 128(3 个像素)→ 累积概率 0.4375 → 新值 112。
最终效果
将 “瘦高” 的直方图分布变为 “矮胖” 的均衡分布。
核心思想
通过累积概率函数实现灰度值重新分配,使像素值分布更均匀。
掩码(Mask)原理与操作
| 知识点 | 核心内容 | 操作要点 | 应用示例 |
|---|---|---|---|
| 掩码原理 | 黑白二值矩阵(0/255) | 创建与图像同尺寸的无符号矩阵 目标区域设为255 与原始图像进行按位与操作 |
猫图像局部提取:掩码白色区域保留原图,黑色区域置零 |
直方图均衡化技术
| 实现方法 | 数学原理 | 处理流程 | 效果表现 |
|---|---|---|---|
| 直方图均衡化 | 概率分布映射改善对比度 | 统计各灰度级频率 计算累积分布函数 映射公式:新值=累积概率×255 |
狗图像处理:集中分布的灰度值被拉伸到更广范围 |
掩码实操步骤
# OpenCV掩码实现示例
import cv2
import numpy as np
# 初始化与图像同尺寸的黑色掩码
mask = np.zeros(image.shape[:2], dtype=np.uint8)
# 设置目标区域为白色(255)
cv2.rectangle(mask, (x,y), (x+w,y+h), 255, -1)
# 按位与运算
masked_img = cv2.bitwise_and(original, original, mask=mask)
直方图分析对比
| 特征指标 | 原始直方图 | 均衡化后直方图 |
|---|---|---|
| 分布形态 | 瘦高型集中分布 | 矮胖型均匀分布 |
| 动态范围 | 集中在狭窄亮度区间 | 覆盖0-255全范围 |
| 对比度表现 | 细节模糊 | 细节清晰可见 |
关键技术参数
-
数据类型规范
掩码矩阵必须声明为dtype=np.uint8,否则会导致按位运算失败 -
直方图预处理
需要先计算归一化概率分布:
p(rk)=nkMN p(r_k) = \frac{n_k}{MN} p(rk)=MNnk
其中nkn_knk为灰度级kkk的像素数,MNMNMN为图像总像素数 -
灰度值映射
最终新灰度值需执行四舍五入:
sk=round(255⋅∑j=0kp(rj)) s_k = round(255 \cdot \sum_{j=0}^k p(r_j)) sk=round(255⋅j=0∑kp(rj))
效果验证方法
- 并排显示原始图像与处理结果
- 叠加绘制均衡化前后直方图曲线
- 使用
cv2.imshow()对比局部细节差异 - 通过PSNR/SSIM指标量化改善程度
课时22:均衡化效果_笔记
直方图均衡化
均衡化示例
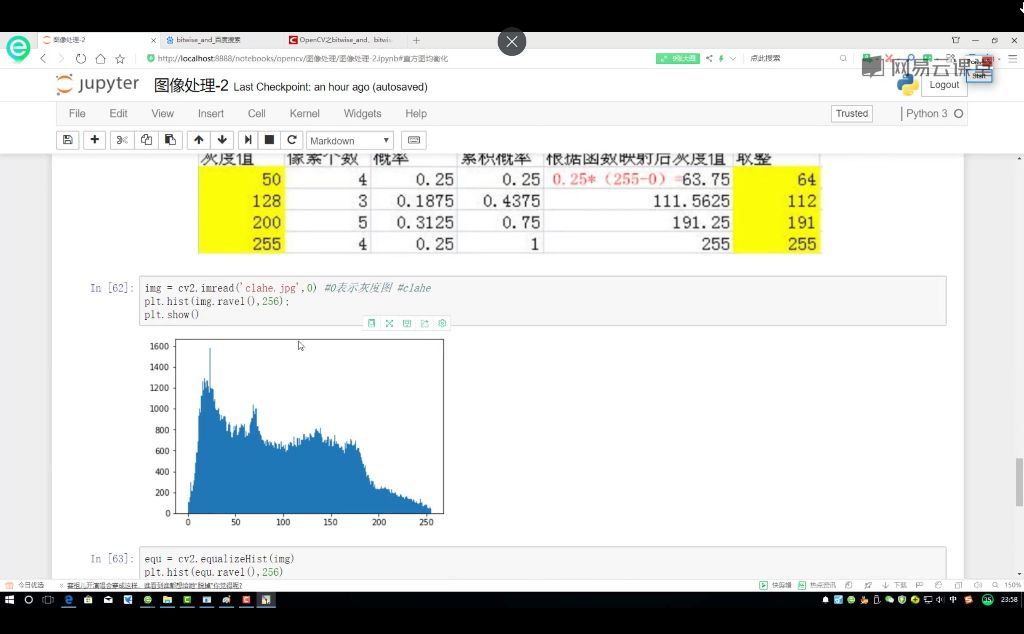
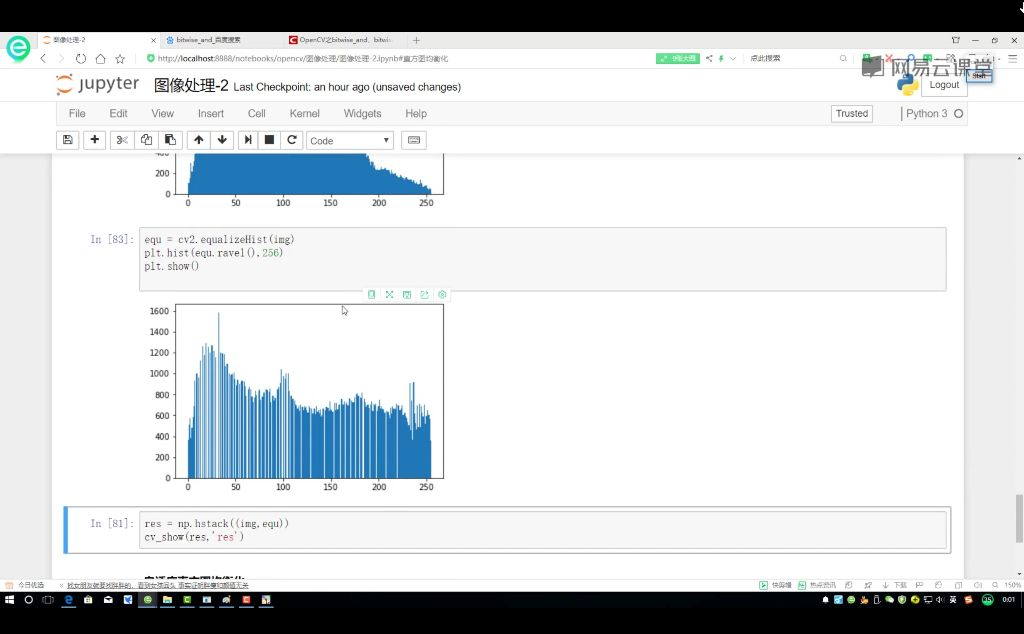
基本操作:使用 cv2.equalizeHist(img) 函数实现直方图均衡化,只需传入灰度图像即可完成变换。
效果对比:均衡化后直方图分布从“尖峰状”变为“扁平状”,原图中较少的灰度值(如小值区域)在均衡化后明显增多。
代码演示:
import cv2
import numpy as np
img = cv2.imread('input.jpg', 0)
equ = cv2.equalizeHist(img)
cv2.imshow('Original vs Equalized', np.hstack((img, equ)))
cv2.waitKey(0)
均衡化对比
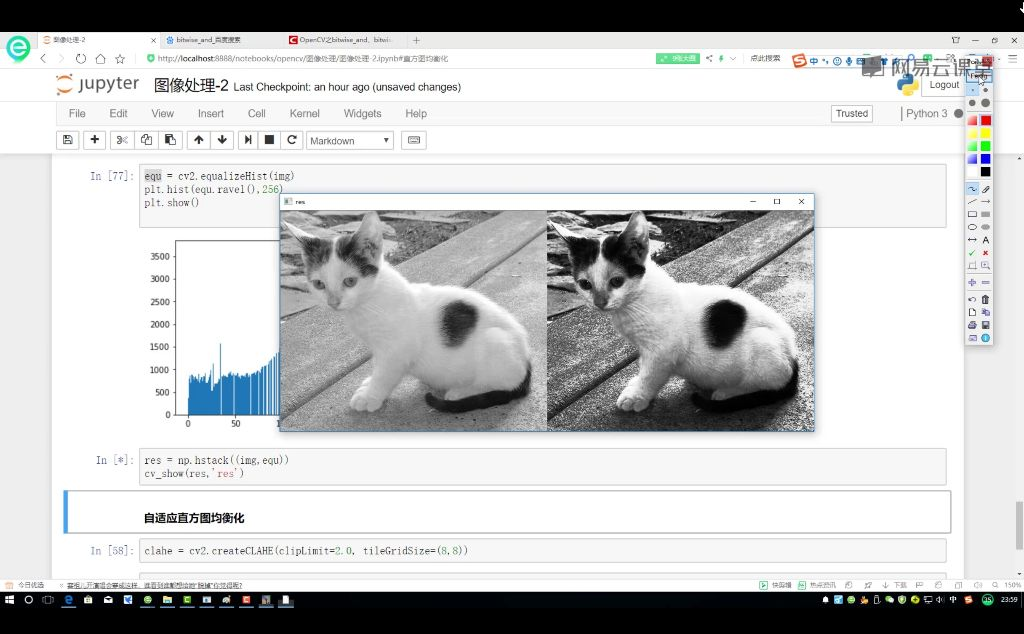
视觉差异:原始图像(左)色彩较淡,细节模糊;均衡化图像(右)对比度增强,整体更明亮。
细节变化:通过 np.hstack() 将原图与均衡化结果水平拼接展示,可直观比较两者的亮度分布差异。
典型应用:适用于需要增强图像整体对比度的场景,如医学影像、低光照图像处理。
均衡化示例验证
效果验证:在人物面部图像中,均衡化使皮肤区域亮度提升,但可能丢失阴影细节。
局限性:全局均衡化会导致高光区域过曝(如面部反光)或阴影细节消失(如五官轮廓)。
数据说明:示例使用灰度值矩阵演示均衡化计算过程,包含像素概率和累积概率的完整转换公式:
[
s_k = T(r_k) = (L-1) \sum_{j=0}^{k} \frac{n_j}{N}
]
自适应直方图均衡化
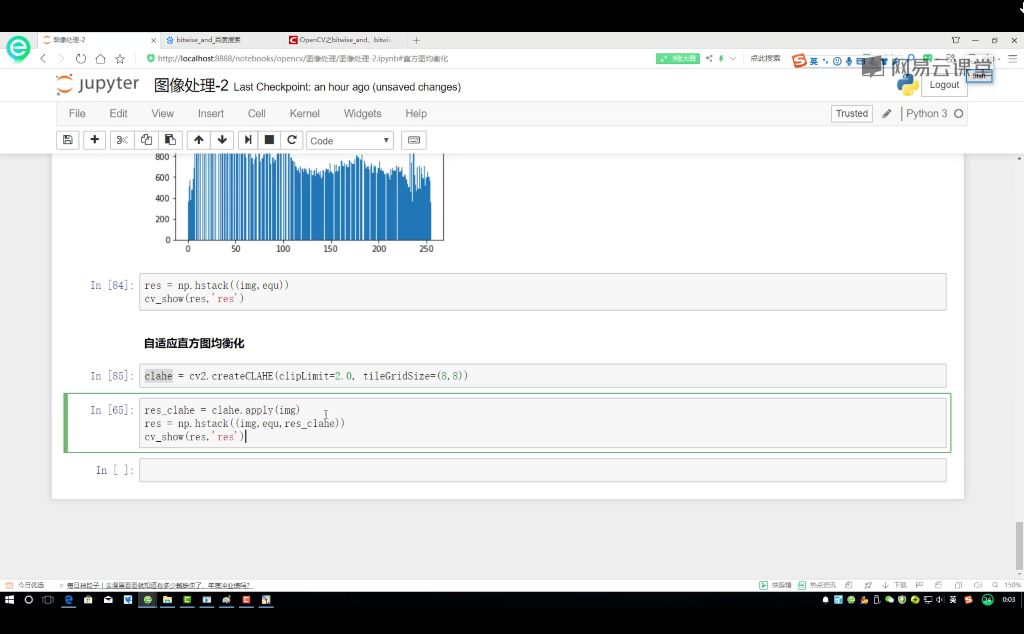
改进原理:将图像划分为局部区域单独均衡化,避免全局处理导致的细节丢失。
关键参数:
clipLimit=2.0:对比度限制阈值tileGridSize=(8,8):分块尺寸
实现方法:
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
cl1 = clahe.apply(img)
自适应直方图均衡化示例
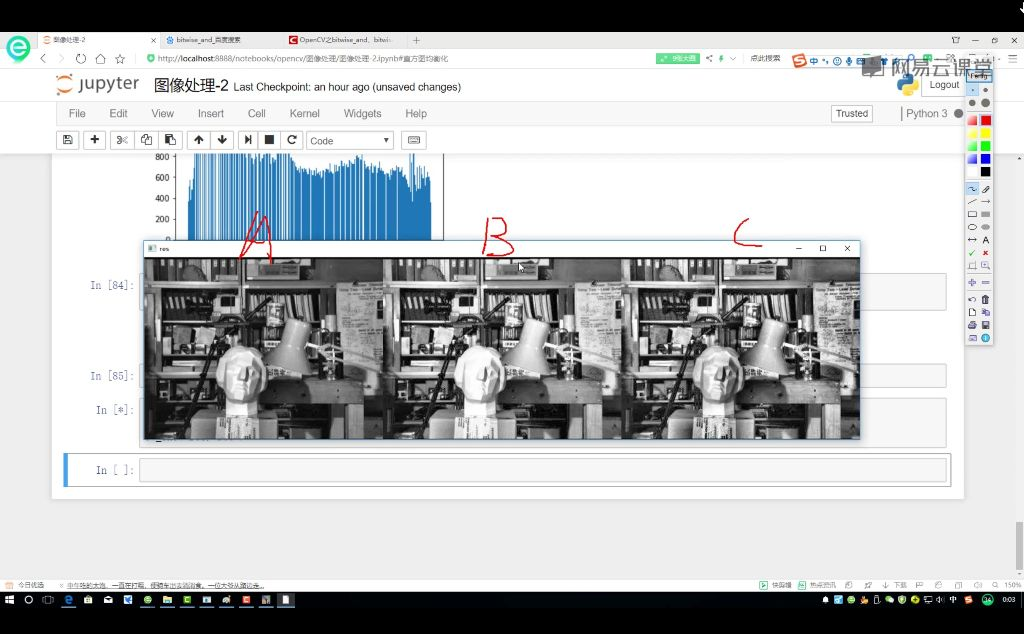
效果对比:
- A(原始):细节完整但对比度低
- B(全局均衡):丢失纹理细节
- C(自适应):保留细节同时提升对比度
边界处理:OpenCV 通过双线性插值消除分块边界痕迹。
适用场景:适用于需要保留局部特征的图像,如人脸识别中的微表情或医学影像的病灶区域。
直方图图像处理总结
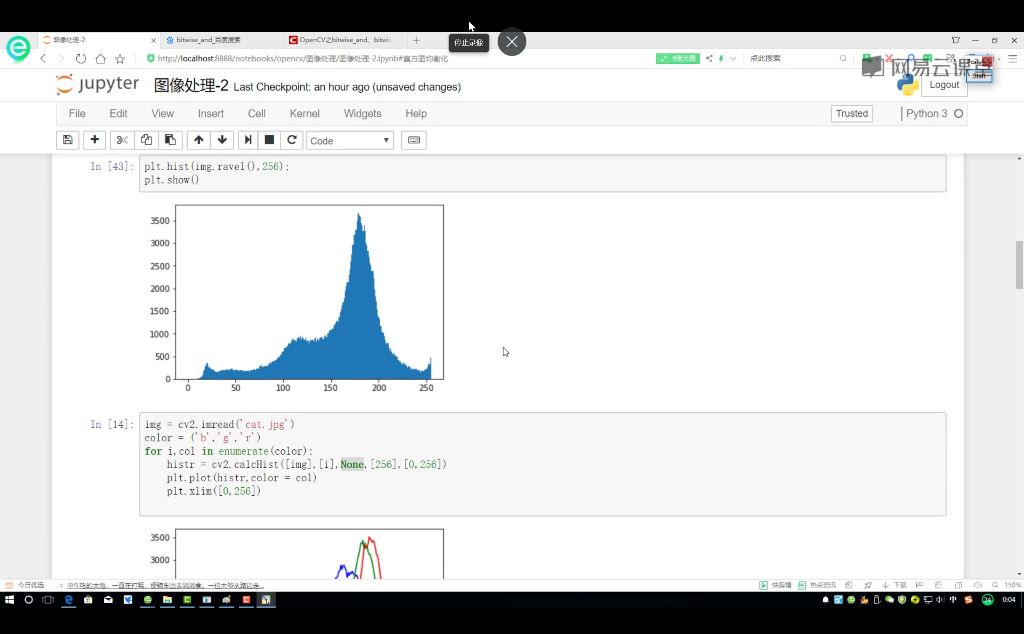
核心功能:
- 分析图像灰度分布(
cv2.calcHist) - 可视化像素强度分布(
plt.hist)
核心方法:
- 全局均衡化:简单快速,适合整体低对比度图像
- 自适应均衡化:保留局部特征,计算复杂度较高
典型应用链:
- 读取灰度图像(
cv2.imread('img.jpg', 0)) - 计算原始直方图
- 选择均衡化方法
- 可视化对比结果
知识小结表格展示
| 类别 | 核心内容 | 操作演示 | 技术对比 |
|---|---|---|---|
| 直方图均衡化 | 改善图像像素分布不均匀问题 | 使用OpenCV的equalizeHist()函数处理猫图像 |
全局均衡化 vs 自适应均衡化 |
| 自适应均衡化 | 分块处理保留局部细节 | CLAHE算法实现8×8网格处理 | 消除全局均衡化的细节丢失问题 |
| 效果对比 | 亮度/细节/噪声的平衡 | 展示原始图/全局均衡/自适应均衡三组对比 | 自适应方法在纹理保留上表现更优 |
| 技术原理 | 像素值重新分配 | 演示直方图分布变化(尖峰变平缓) | 全局处理导致局部特征模糊 |
| 应用场景 | 医学影像/卫星图增强 | 展示人脸处理前后的细节变化 | 高噪环境需谨慎使用 |
| 函数/方法 | 参数说明 | 优势 | 局限性 |
|---|---|---|---|
equalizeHist() |
单通道灰度图输入 | 简单高效 | 丢失局部细节 |
CLAHE() |
clipLimit/tileGridSize |
保留纹理特征 | 网格边界需插值处理 |
| 直方图分析 | bins/range统计 |
直观显示分布 | 需配合可视化解读 |
补充说明
- 技术对比:全局均衡化可能导致局部特征模糊,而自适应方法(如CLAHE)通过分块处理能更好地保留细节。
- 参数说明:
clipLimit控制对比度限制,tileGridSize决定分块大小(如8×8)。 - 可视化建议:使用Matplotlib绘制均衡化前后的直方图分布对比,增强理解。
课时23:频率变换结果_笔记
傅里叶变换:
时域与频域对比
时域分析
以时间为参照的分析方式,如早上7点吃早饭、8点挤地铁等随时间变化的事件。
频域分析
从更高视角观察事件的重复规律,如"每天吃早饭"、"工作日挤地铁"等周期性行为。
核心观点
在时域中一切是动态进行的,而在频域中所有现象都是静止的周期性规律。
频域概念
频域定义
- 上帝视角比喻:频域就像上帝视角,不关心具体时间点发生什么,只关注事件的重复规律。
- 例子:篮球比赛得分分析,时域描述为"第1分钟得3分,第2分钟得2分",频域则描述为"每隔1分钟得3分和2分交替"。
- 数学本质:任何周期现象都可以分解为不同频率的正弦波组合。
频域图像
- 叠加原理:
- 1个正弦波
- 2个正弦波叠加
- 4个正弦波叠加(更接近矩形波)
- 10个正弦波叠加(几乎形成标准矩形波)
- 关键结论:要精确表示90度矩形波需要无穷多个正弦波叠加。
周期函数的频域表示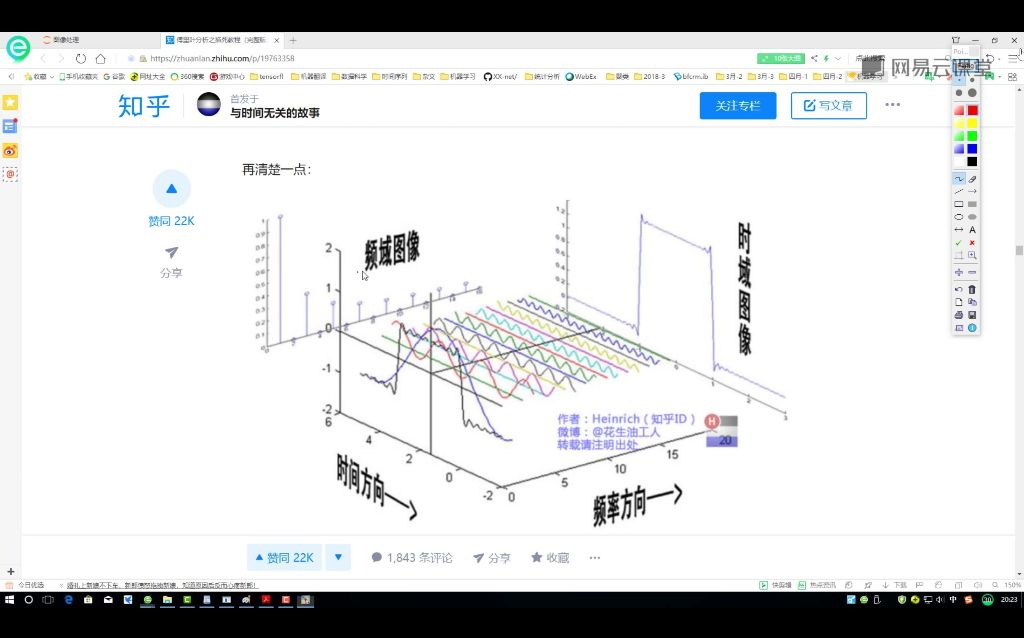
- 观察方法:将时域波形从侧面观察即得到频域表示。
- 振幅轴:表示正弦波的强度。
- 频率轴:表示正弦波的周期倒数。
- 波形特征:
- 低频部分:变化缓慢,振幅较大(如基础波形)。
- 高频部分:变化剧烈,振幅较小(如细节部分)。
傅里叶变换的作用
频率分量分析
- 高频:对应图像中变化剧烈的部分(如边缘、细节)。
- 低频:对应图像中变化缓慢的部分(如平滑区域、大面积色块)。
滤波应用
- 低通滤波:保留低频使图像模糊(去噪、平滑)。
- 高通滤波:保留高频增强图像细节(边缘检测)。
OpenCV实现
- 核心函数:
cv2.dft()(正变换)和cv2.idft()(逆变换)。 - 输入要求:需先转换为
np.float32格式。 - 结果处理:频率0点在左上角,需用
shift变换移到中心。 - 输出特性:返回双通道(实部+虚部),需转换到
(0,255)范围显示。
傅里叶变换基础概念
核心内容为时域(时间维度)到频域(频率维度)的转换。例如:
- 时域:日常生活作息(如7点起床、12点午餐)关注时间顺序的动态过程。
- 频域:篮球比赛得分统计(如场均得分频率)关注事件发生的周期性规律。
关键对比在于时域强调时间顺序,频域聚焦频率和振幅,忽略时间细节。
频域的核心特征
通过“上帝视角”比喻,频域仅提取周期性规律(如“每天吃早饭”的频率),不记录具体发生时间。
- 核心特征:频域图形横轴为频率,纵轴为振幅,直接反映信号的组成成分。
- 易混淆点:频域分析会丢失时域的时间顺序信息,但保留事件重复出现的规律。
正弦波叠加原理
任何周期函数可通过不同频率的正弦波叠加近似。例如矩形波的拟合:
- 低频正弦波对应信号的整体轮廓(振幅大)。
- 高频正弦波补充细节(如快速变化的边缘,振幅小)。
难度在于理解高频分量对信号快速变化的贡献,需结合逐步叠加的动画演示。
时域与频域的直观映射
通过多正弦波叠加图展示转换关系:
- 时域波形:复杂信号由多个正弦波合成,时间轴显示瞬时状态。
- 频域分布:横轴为频率,纵轴为振幅,清晰显示各频率分量的强度。
关键对比:频域图中高频分量位于右侧,低频位于左侧。
应用场景示例
图像处理中,傅里叶变换用于:
- 噪声分离:高频成分常对应图像噪声(如锐利边缘),可通过滤波去除。
- 数据压缩:保留主要低频成分,减少高频细节以压缩文件大小。
需注意频域分析适用于周期性或平稳信号,非周期信号需短时傅里叶变换(STFT)等扩展方法。
表格形式建议:
| 知识点 | 核心内容 | 易混淆点/关键对比 | 难度系数 |
|---|---|---|---|
| 傅里叶变换基础 | 时域到频域的抽象转换(如作息时间→频率统计) | 时域动态 vs 频域静态 | ⭐⭐ |
| 频域特征 | 仅关注周期性规律(“每天吃早饭”的频率) | 忽略时间顺序,保留频率振幅 | ⭐⭐ |
| 正弦波叠加 | 矩形波由多正弦波拟合,高频分量对应快速变化 | 高频振幅小但贡献细节 | ⭐⭐⭐ |
| 时域-频域映射 | 频域图横轴频率、纵轴振幅,反映信号组成 | 高频在右,低频在左 | ⭐⭐ |
| 图像处理应用 | 频域分离噪声(高频)或压缩数据(保留低频) | 需区分周期/非周期信号的处理方法 | ⭐⭐⭐ |
课时24:低频和高频的使用_笔记
傅里叶变换的作用
高频
定义:图像中变化剧烈的灰度分量
特征:边界区域(如船与水的交界处)灰度值变化迅速,对应频域图像的外围区域
示例:茫茫大海中突然出现一艘船,水和船之间形成明显差异
低频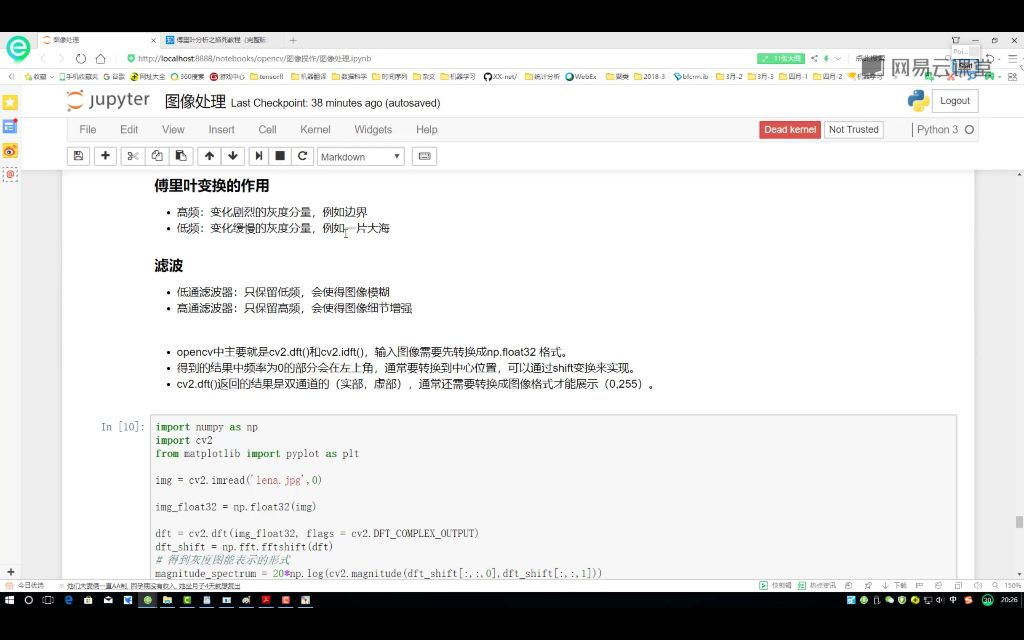
定义:变化缓慢的灰度分量
特征:非边界区域(如茫茫大海)灰度值变化平缓,对应频域图像的中心区域
比喻:像老年人慢慢悠悠的动作
滤波
低通滤波器
作用:保留低频信息,去除高频
效果:图像变模糊(边界信息减弱)
原理:抑制频域图像外围区域
高通滤波器
作用:保留高频信息,去除低频
效果:图像细节增强(边界锐化)
原理:抑制频域图像中心区域
OpenCV中的函数
核心函数cv2.dft():执行傅里叶变换cv2.idft():执行逆傅里叶变换
注意事项
输入图像需转换为np.float32格式
频率为0的部分初始在左上角,需通过shift变换到中心
返回结果为双通道(实部+虚部),需转换为图像格式(0-255)显示
处理流程
图像转float32
执行cv2.dft()
使用np.fft.fftshift()中心化
计算幅度谱:20*np.log(cv2.magnitude())
可视化显示
傅里叶变换实现示例
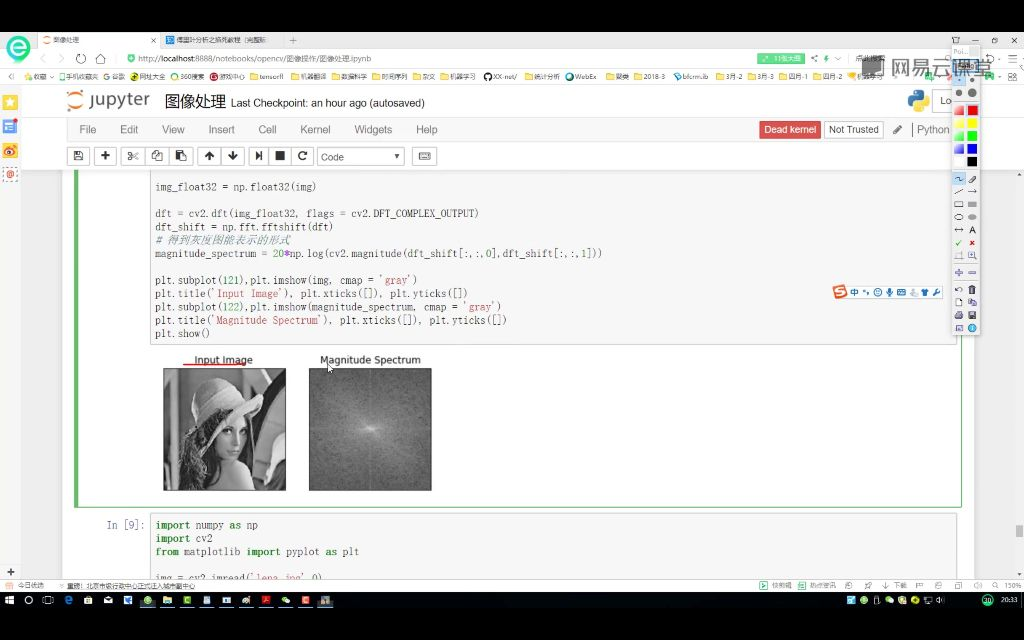
关键步骤
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('lena.jpg', 0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:,:,0], dft_shift[:,:,1]))
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(magnitude_spectrum, cmap='gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()
频域分析结果解读
特征解读
中心区域:低频分量(亮度高)
外围区域:高频分量(亮度低)
离中心越远频率越高
物理意义
低频:图像整体轮廓
高频:图像细节和边缘
傅里叶变换在图像处理中的应用
低通滤波器实现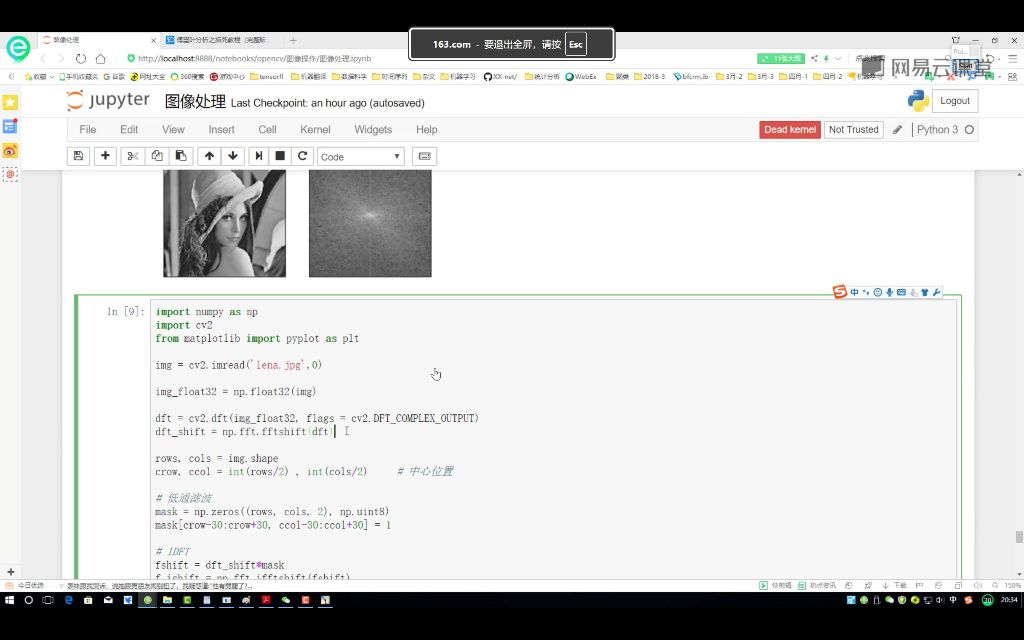
核心步骤
读取图像并转换为浮点格式:img_float32 = np.float32(img)
傅里叶变换:dft = cv2.dft(img_float32, flags=cv2.DFT_COMPLEX_OUTPUT)
频谱中心化:dft_shift = np.fft.fftshift(dft)
创建掩膜:中心区域设为1,其余为0
逆变换还原图像
掩膜原理
通过mask[crow-30:crow+30, ccol-30:ccol+30] = 1保留中心低频区域
实际效果会使图像变得模糊,保留整体轮廓但弱化细节
技术要点
中心位置计算:crow, ccol = int(rows/2), int(cols/2)
掩膜尺寸:60×60像素区域(±30)
逆变换前需执行np.fft.ifftshift还原频谱位置
高通滤波器实现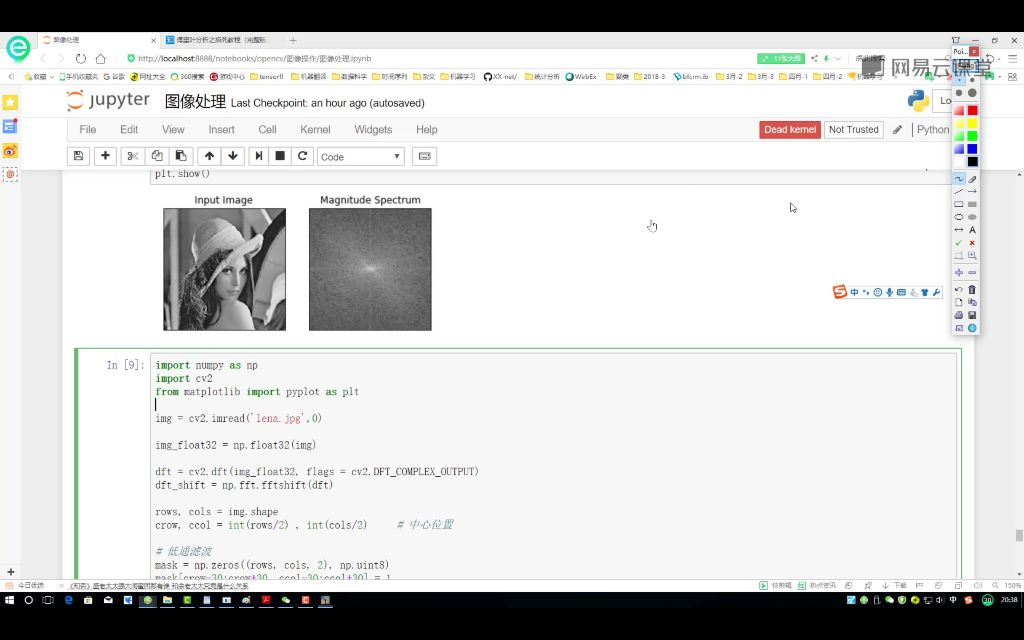
实现差异
掩膜初始值设为1:mask = np.ones((rows, cols, 2), np.uint8)
中心区域清零:mask[crow-30:crow+30, ccol-30:ccol+30] = 0
效果特征
突出图像边缘和细节
主体内部区域变为空白
适合边缘检测等应用场景
频域处理优势
分离低频/高频成分更直观
计算效率高于空间域卷积
可通过简单矩阵运算实现复杂滤波效果
傅里叶变换核心概念
基本流程
关键特性
低频分量对应图像整体结构
高频分量对应图像细节和噪声
频谱中心化后低频集中在图像中心
显示处理
使用cv2.magnitude计算幅值
对数变换增强可视化:20*np.log(cv2.magnitude(...))
双通道结果需转换为单通道显示
以下是整理后的知识小结表格,涵盖傅里叶变换及频域处理的核心内容:
| 分类 | 核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|---|
| 傅里叶变换基本概念 | 将图像从空间域转换到频域进行分析处理 | 频域中低频/高频的分布规律(低频集中在中心) | ⭐⭐⭐ |
| 低通滤波器原理 | 保留低频信息(图像平滑区域),过滤高频信息(边缘细节) | 应用效果:图像模糊化(如示例中帽子/脸部细节丢失) | ⭐⭐ |
| 高通滤波器原理 | 保留高频信息(边缘轮廓),过滤低频信息(平滑区域) | 应用效果:边界锐化(如示例仅保留人像轮廓) | ⭐⭐ |
| OpenCV实现关键步骤 | 1. 强制转换为float32格式2. fftshift中心化处理3. 双通道结果转图像格式 |
易忽略点:逆变换前需ifftshift还原频域分布 |
⭐⭐⭐⭐ |
| 频域处理优势 | 在频域中分离低频/高频比空间域操作更高效 | 典型应用场景:噪声消除(低频)/ 边缘增强(高频) | ⭐⭐⭐ |
关键说明
- 低频/高频分布:频域图像中心区域通常代表低频分量(图像整体结构),外围为高频分量(细节和噪声)。
- 滤波器效果对比:低通滤波器平滑图像但损失细节,高通滤波器突出边缘但削弱整体结构。
- OpenCV注意事项:频域操作需严格遵循
float32格式转换和频谱中心化步骤,否则可能导致结果异常。
课时25:信用卡数字的识别_笔记
实际项目实战:银行卡卡号识别系统
流程解析
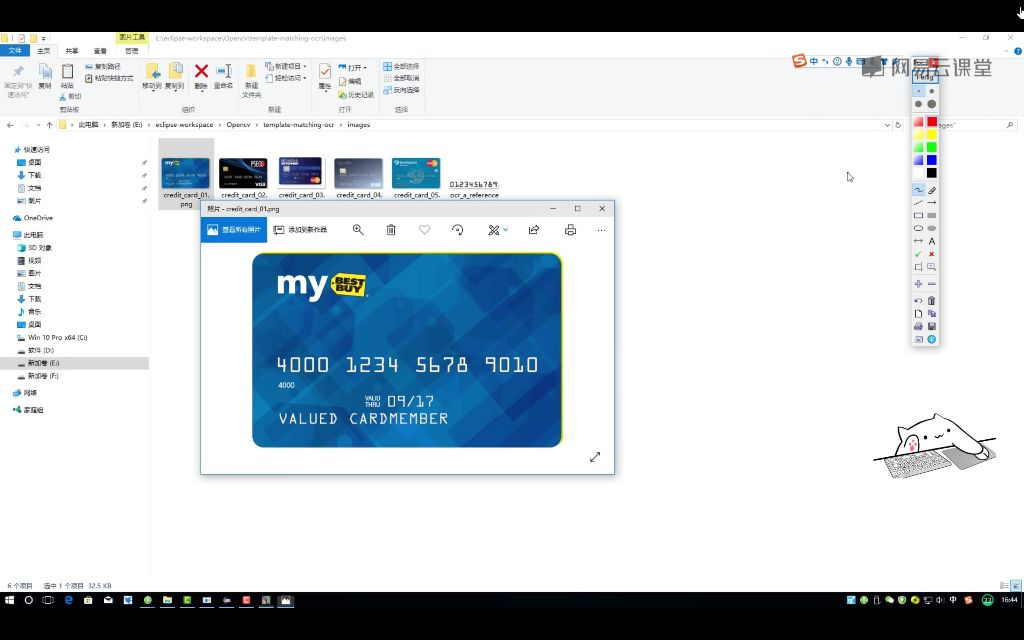
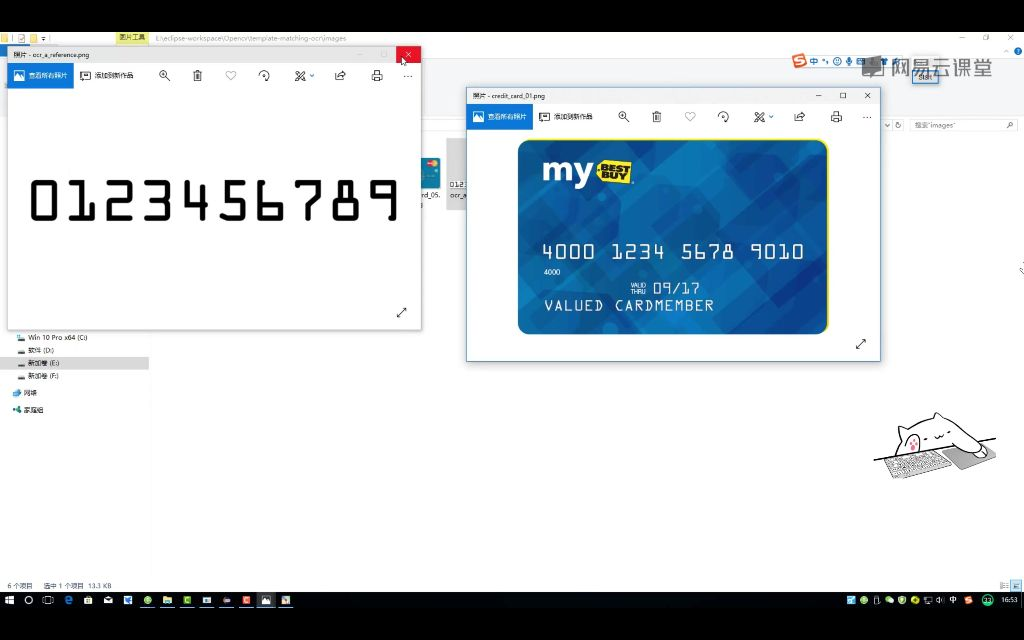
项目目标
输入银行卡图像后,识别并输出卡号数字序列及其对应位置,类似车牌识别系统。
输出要求
需要分组输出数字序列(如4000 1234 5678 9010),每组数字需用矩形框标注在原图上。
技术基础
需掌握OpenCV基本操作、形态学处理技术、模板匹配方法、图像预处理技术。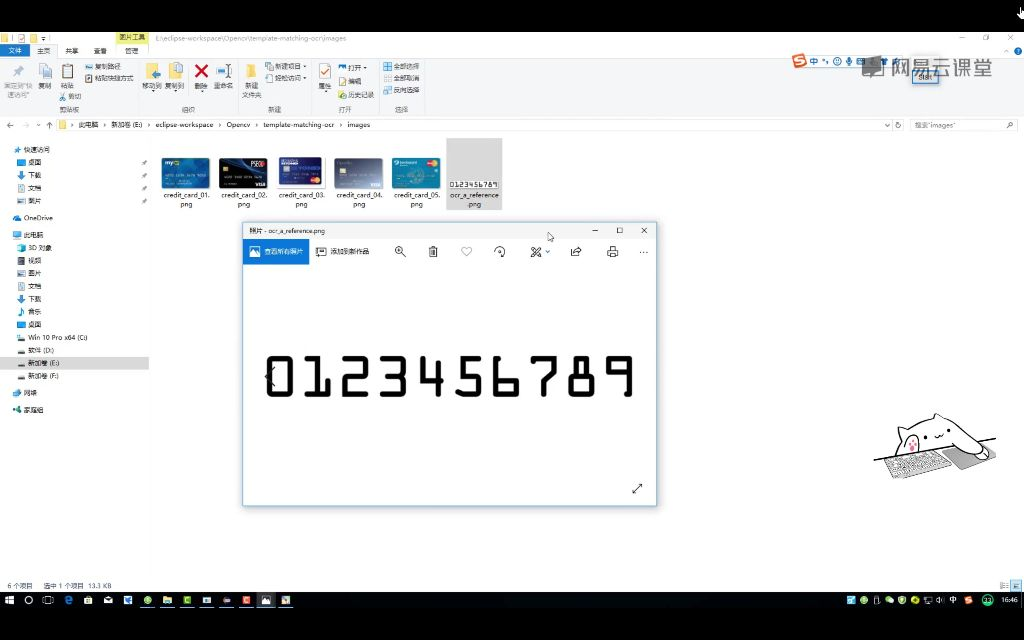
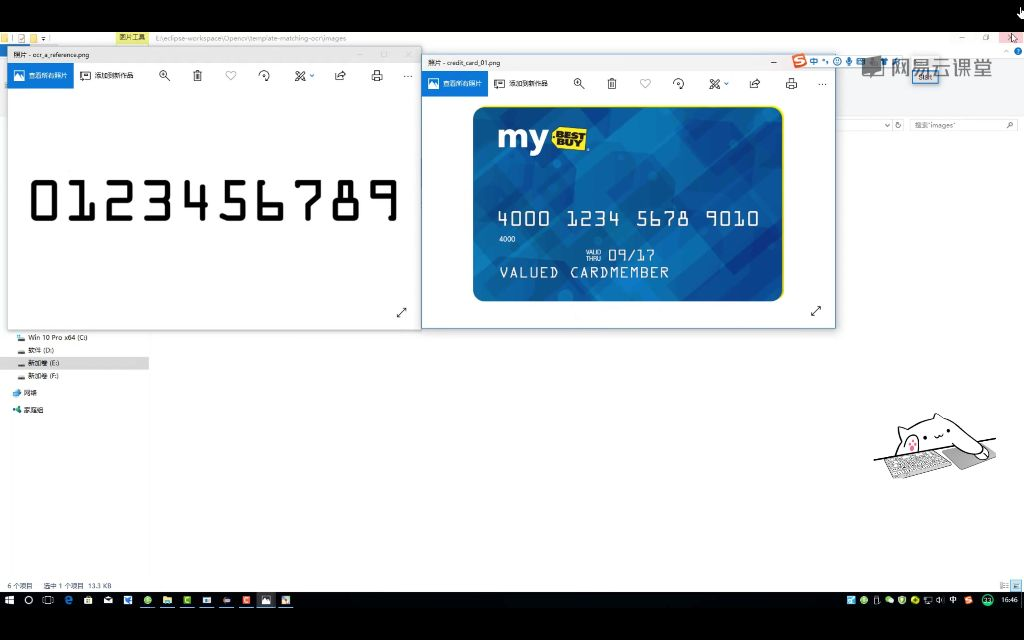
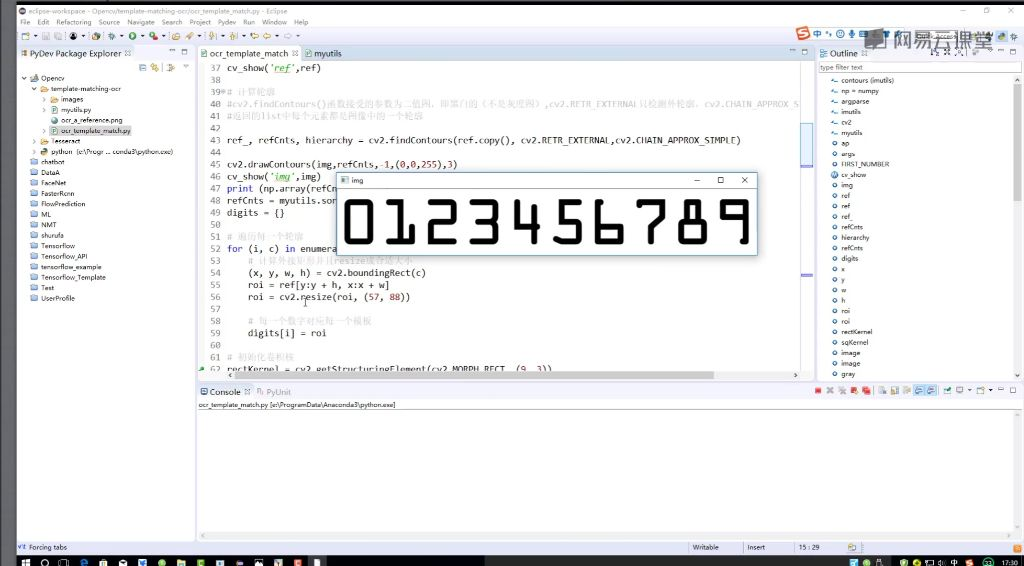
模板准备
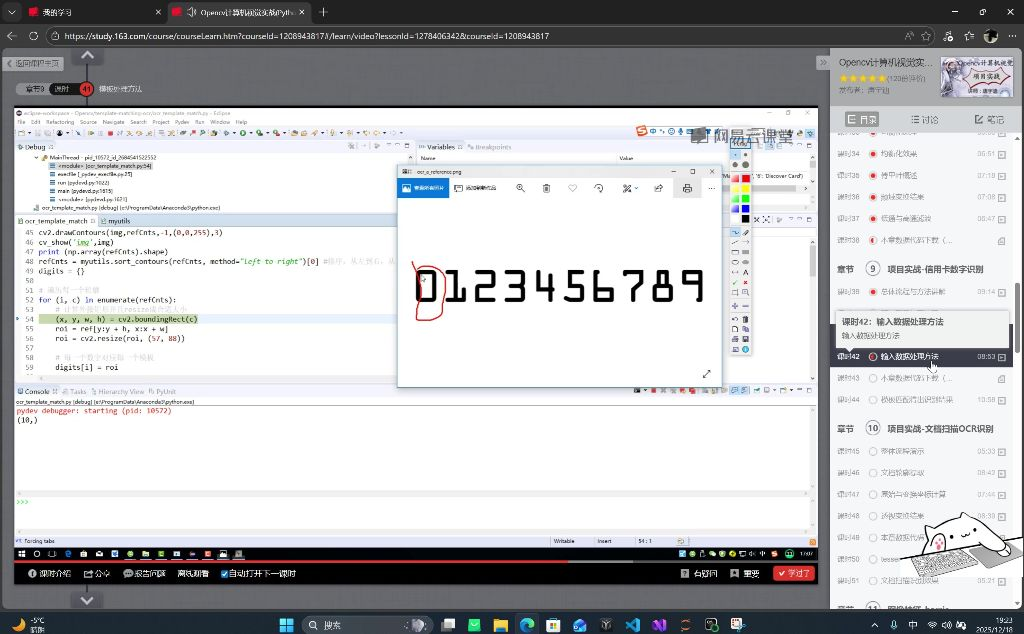
必须使用与目标字体风格一致的模板(如银行卡专用字体),包含完整数字集0-9,每个数字需单独提取保存。
轮廓检测
对模板图像进行轮廓检测,优先选择外轮廓(数字的外边界),获取每个数字的外接矩形。
匹配原理
将待识别区域与所有模板数字进行相似度计算,采用平方差等匹配方法,相似度最高的模板数字即为识别结果。
预处理流程
图像处理
图像灰度化、二值化处理、轮廓检测、外接矩形获取。
轮廓筛选
根据长宽比过滤非数字轮廓(如文字logo),银行卡数字具有特定长宽比例特征,保留符合数字特征的轮廓。
尺寸归一化
将检测区域resize到与模板相同尺寸,保证匹配时的尺度一致性。
基本思想小结
核心方法
基于模板匹配的数字识别,结合轮廓检测的精确定位。
关键技术点
模板的准确性和适配性,轮廓检测的准确性,预处理的质量控制。
实现步骤
准备专用数字模板库,输入图像预处理,粗定位数字区域,精确定位单个数字,模板匹配识别,结果输出与可视化。
知识小结表格
| 知识点 | 核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|---|
| 模板匹配原理 | 通过对比目标区域与预存模板的相似度(如平方差计算)识别数字 | 需区分模板匹配与特征匹配的适用场景 | ⭐⭐ |
| 轮廓检测应用 | 提取数字外轮廓后生成外接矩形,用于标准化匹配区域 | 注意过滤非数字轮廓(如文字/logo)的长宽比筛选 | ⭐⭐ |
| 预处理流程 | 灰度转换→二值化→形态学操作(开运算/闭运算)优化轮廓质量 | 形态学操作顺序对结果影响显著 | ⭐⭐⭐ |
| 银行卡数字识别步骤 | 1. 模板数字分离 2. 输入图像区域检测 3. 轮廓匹配与Resize 4. 分组输出 | 四分组逻辑需与卡号标准格式对齐 | ⭐⭐ |
| 项目实战难点 | 字体特异性(如银行卡专用字体需定制模板) | 模板字体一致性决定匹配准确率 | ⭐⭐⭐⭐ |
课时26:环境配置和预处理_笔记
模板匹配
参数设置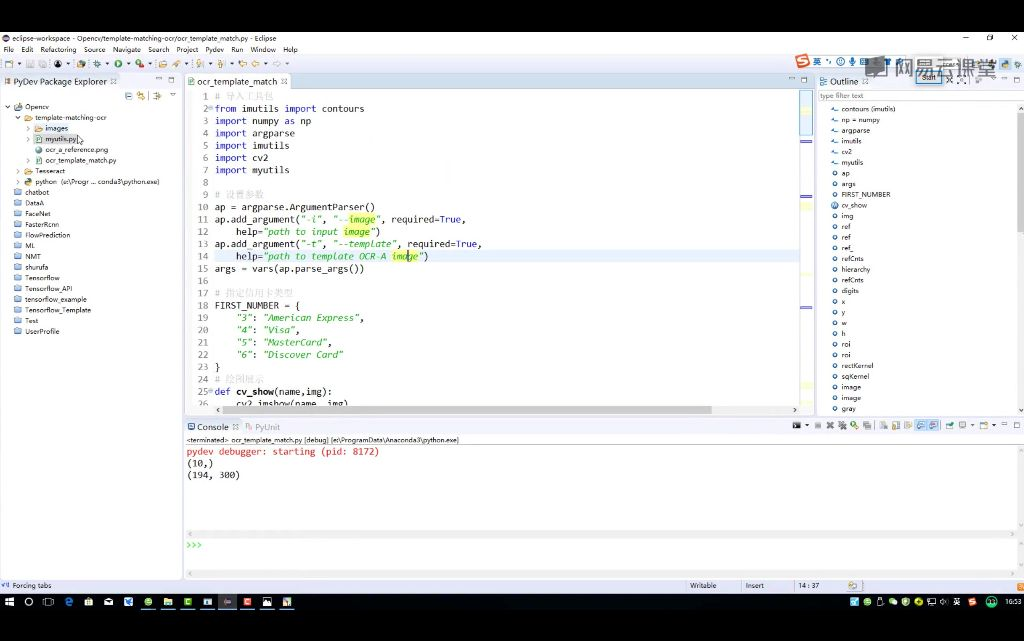
核心参数需要指定输入图像(I)和模板图像(t)两个参数,通过命令行执行时使用-i和-t参数传递参数作用。
-i:指定输入图像的路径,如信用卡图像
-t:指定模板图像的路径,包含待匹配的数字模板
代码实现
通过首数字识别信用卡类型,定义信用卡类型映射字典。
环境配置
开发工具选择
工具要求需要支持debug功能的IDE,不限定具体工具。
推荐工具包括Eclipse(支持多语言:Python/Java/C)、PyCharm、Jupyter Notebook。
选择建议根据项目需求,代码量大时推荐使用支持debug的IDE。
配置运行环境
参数配置方法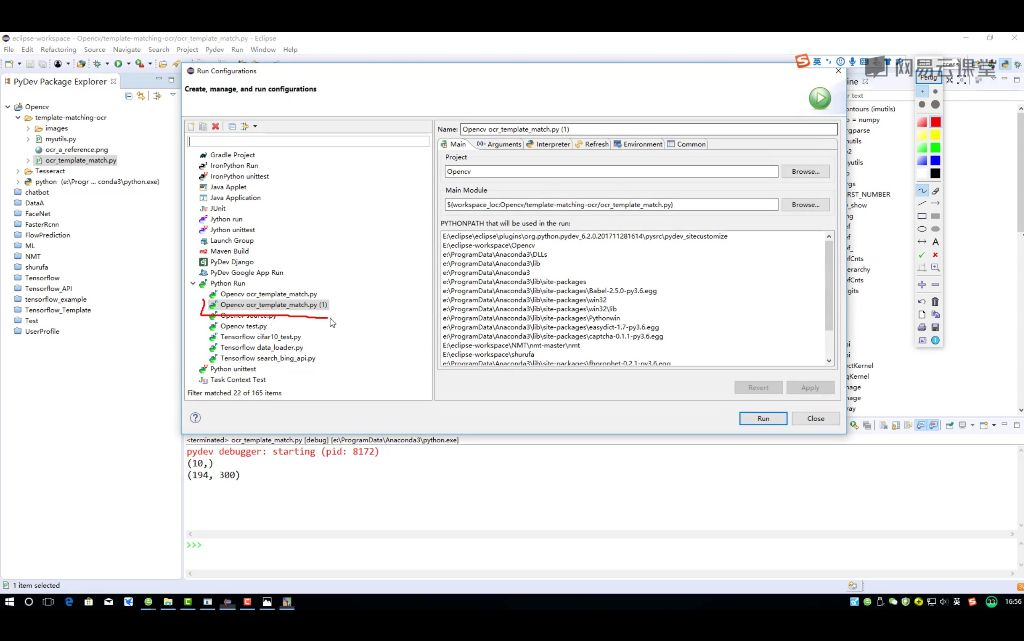
:右键点击.py文件选择"Run As",选择"Run Configurations",在"Program arguments"中输入参数:
-i images/credit_card_03.png
-t images/ocr_a_reference.png
点击Apply保存配置。
文件路径说明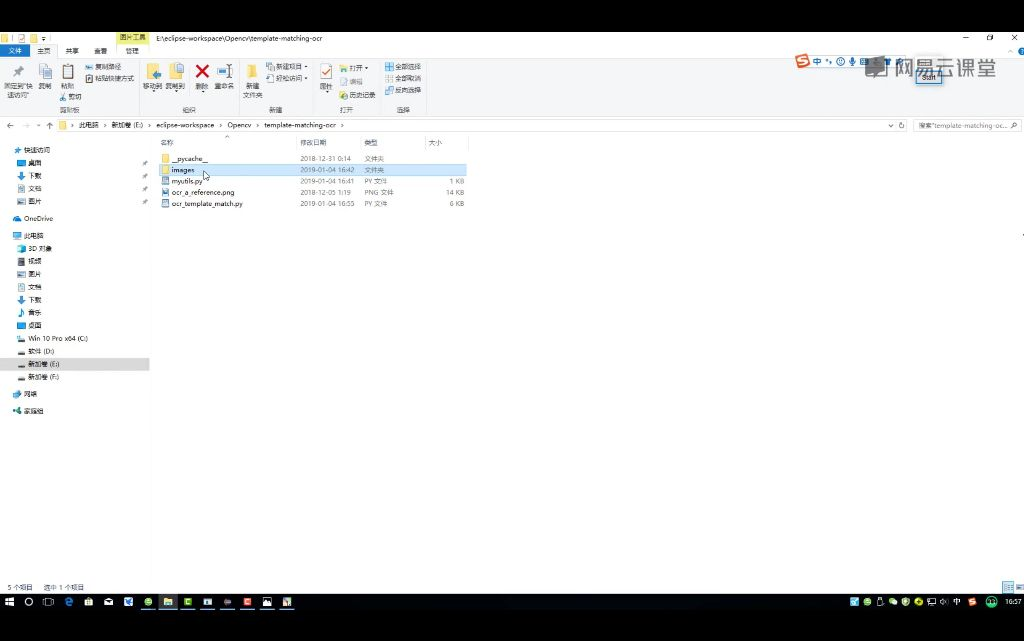
:输入图像存放在images目录下,如credit_card_03.png;模板图像为ocr_a_reference.png,包含0-9的数字模板。路径规范使用相对路径,确保文件结构一致。
运行验证依赖库主要需要OpenCV库。配置完成后直接运行,验证是否能正常输出结果。调试建议遇到问题时可通过debug模式逐行检查代码执行。
图像处理流程
灰度处理和二值处理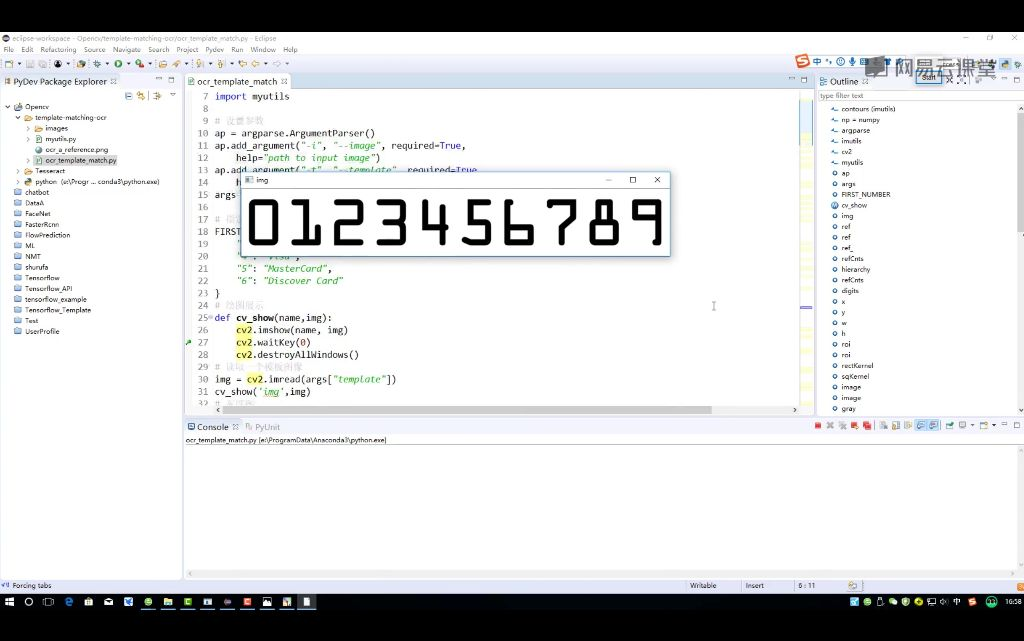
灰度转换将彩色模板图像转换为灰度图,使用函数,参数为二值化处理。
对灰度图进行阈值处理,使用函数,参数为(反二值化),阈值设为10,最大值255。
处理原因轮廓检测需要输入二值图像,且原图背景为白色(255),数字为黑色(0),反二值化后数字变为白色(255)。
检测轮廓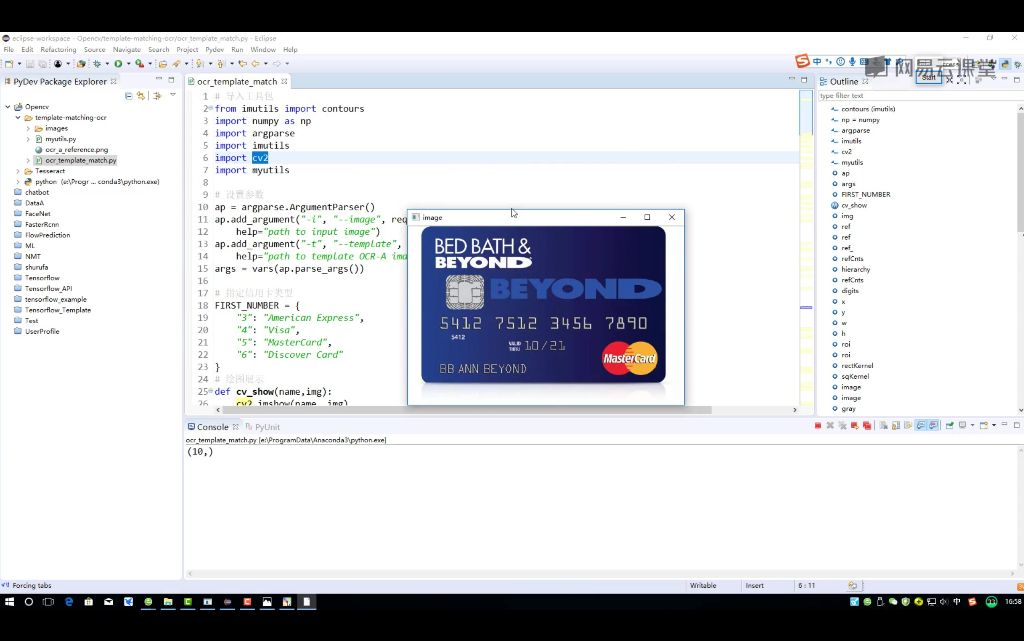
轮廓检测使用函数,参数为只检测外轮廓,仅保留轮廓终点坐标。
外接矩形检测到轮廓后计算每个数字的外接矩形,用于后续模板匹配。
轮廓排序使用方法按从左到右顺序排列数字轮廓。
模板匹配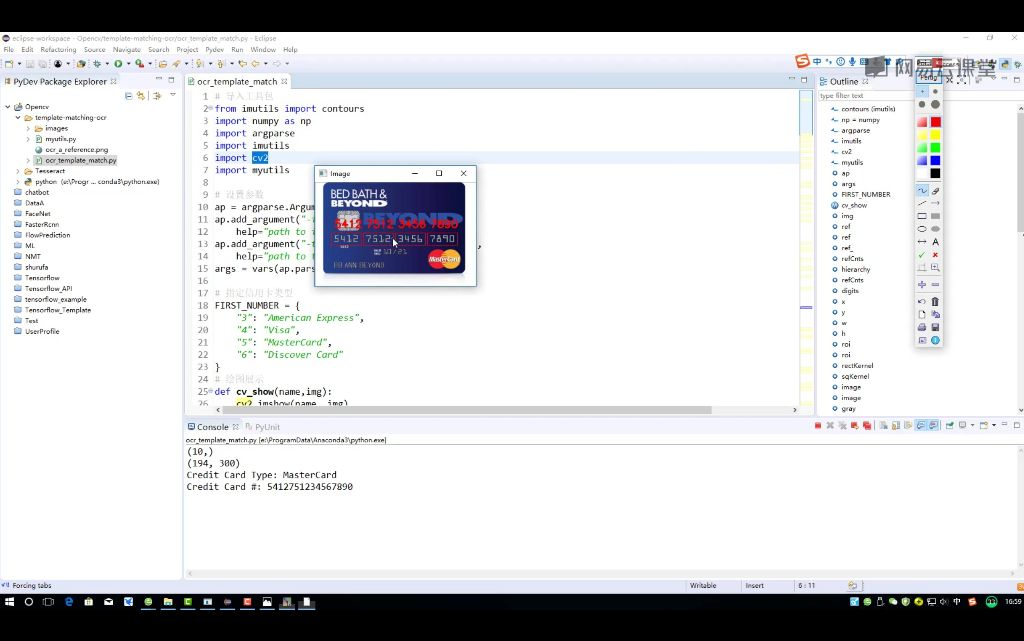
匹配过程对信用卡图像中的每个数字区域与模板进行匹配。
结果验证示例中正确识别出信用卡类型为MasterCard,卡号为5412751234567890。
应用场景该方法同样适用于车牌检测等类似场景。
步骤详解
读入模板图像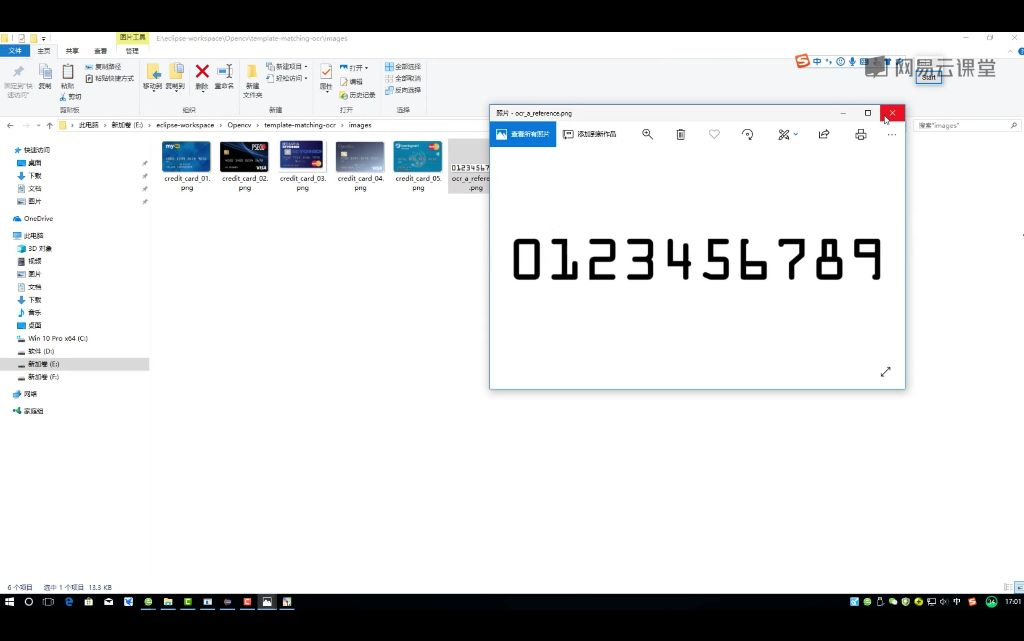
图像特性模板图像边界为白色(像素值255),数字为黑色。
读取方法使用读取参数指定的模板路径。
调试建议建议在首次实现时使用debug模式逐步查看图像处理结果。
转为灰度图
转换原因减少计算量,简化后续处理步骤。
转换方法使用进行BGR到灰度的转换。
注意事项灰度图仍保留原始图像的明暗关系,但仅含单通道。
二值化处理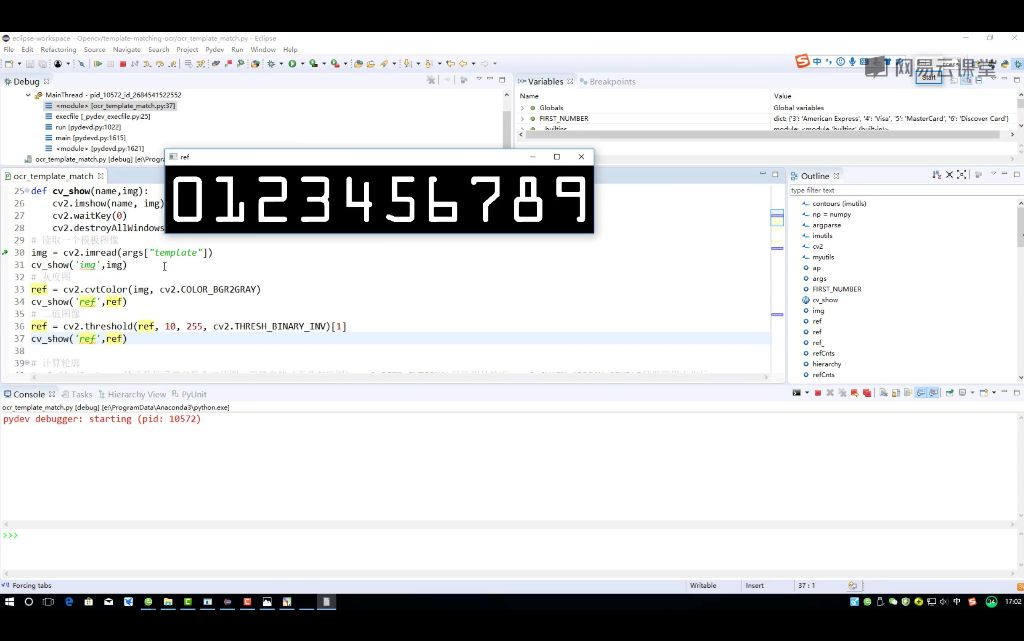
阈值选择阈值设为10,低于阈值设为0(黑),高于阈值设为255(白)。
反二值化使用使数字区域变为白色(255),便于轮廓检测。
处理必要性轮廓检测函数要求输入必须是二值图像。
OCR模板匹配流程
| 知识点核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|
| 通过Python实现信用卡数字识别 | 参数设置(-I输入图像,-t模板路径) |
⭐⭐⭐ |
| 图像预处理、轮廓检测、模板匹配 | 灰度与二值化转换的阈值选择 |
IDE选择与调试技巧
| 知识点核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|
| 推荐使用Eclipse进行多语言开发 | 环境配置灵活性(Notebook/PyCharm等均可替代) | ⭐⭐ |
| Debug逐行分析的重要性 | 断点设置与变量监控的实践技巧 |
图像预处理技术
| 知识点核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|
| 灰度转换→二值化→形态学操作 | 形态学操作顺序对结果的影响(如顶帽优先于Sobel) | ⭐⭐⭐⭐ |
| 轮廓检测与外接矩形计算 | 膨胀次数对轮廓闭合性的影响 |
模板匹配实战演示
| 知识点核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|
| 分步切割信用卡数字区域 | 轮廓分组逻辑(按坐标或面积筛选) | ⭐⭐⭐⭐ |
| 与模板对比输出结果(如5412→7512) | 匹配精度优化(归一化相关系数 vs 平方差) |
项目学习方法论
| 知识点核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|
| 通过Debug拆解复杂代码 | 断点设置技巧(条件断点、异常断点) | ⭐⭐ |
| 避免整体阅读导致的混乱 | 变量监控与表达式评估的实时应用 |
课时27:模板处理方法_笔记
信用卡数字识别
轮廓检测
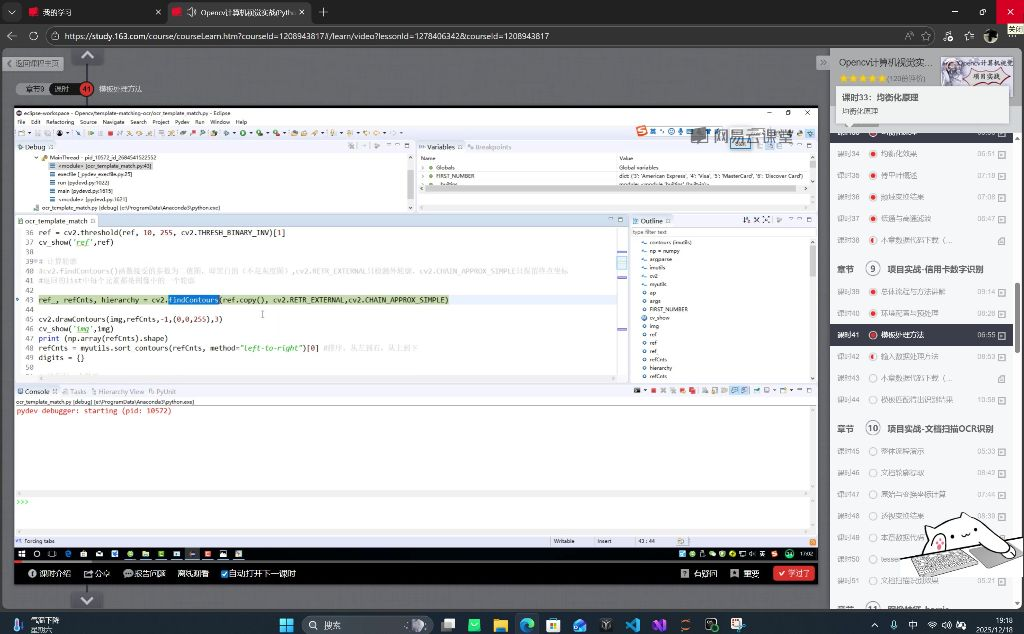
- 关键参数:使用
cv2.findContours()时,第一个参数需要传入图像的.copy()副本,因为原始图像后续还需要使用。 - 轮廓模式:参数
cv2.RETR_EXTERNAL表示只检测外轮廓,内轮廓对数字识别任务无用。 - 轮廓近似方法:使用
cv2.CHAIN_APPROX_SIMPLE来保留轮廓的关键坐标点。 - 绘制技巧:
cv2.drawContours()中参数-1表示绘制所有检测到的轮廓,颜色(0,0,255)为红色线条,线宽3像素。 - 验证方法:通过
np.array(refCnts).shape检查轮廓数量是否正确(信用卡数字应有10个轮廓)。
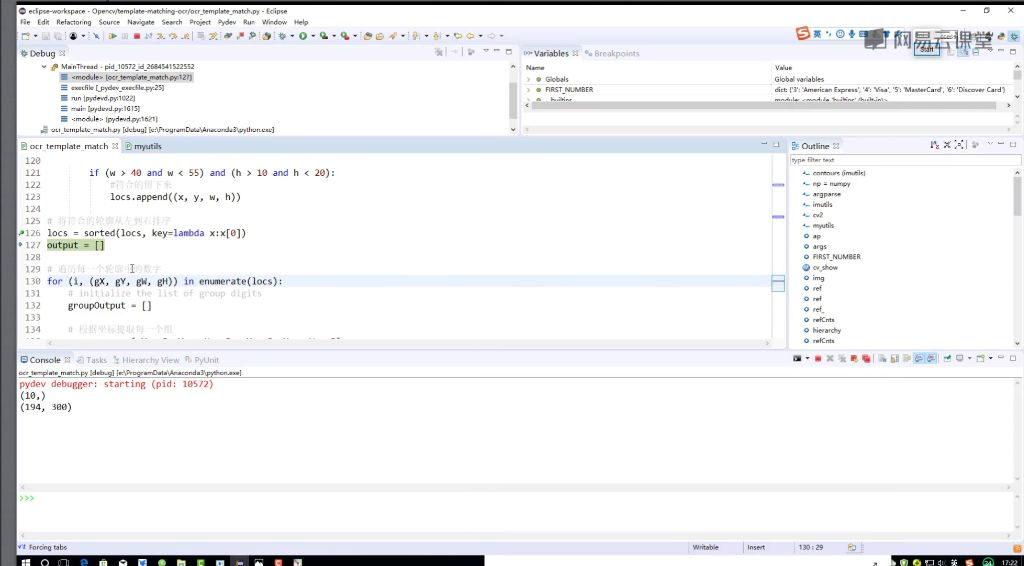
轮廓排序
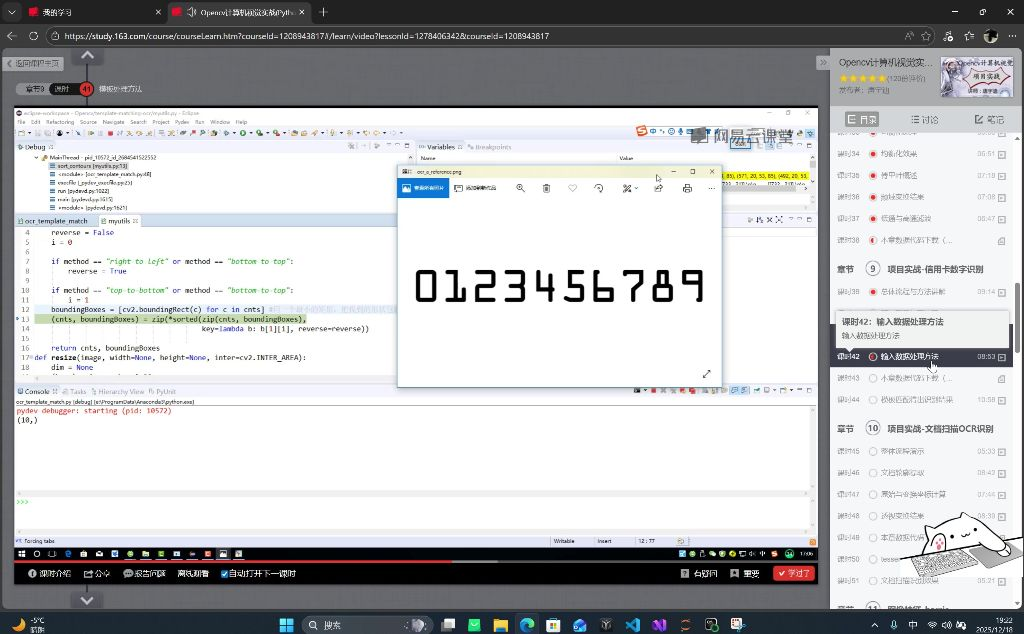
- 排序必要性:检测到的轮廓顺序不一定对应数字
0-9的自然顺序,需要手动排序。 - 核心步骤:计算每个轮廓的外接矩形
cv2.boundingRect(),提取矩形左上角坐标(x,y),根据x坐标进行从左到右排序。 - 实现细节:外接矩形返回值为
(x,y,w,h)四元组,使用myutils.sort_contours()自定义排序函数,排序后轮廓索引即对应数字值(0轮廓对应数字0)。 - 验证方法:排序后应确保轮廓顺序与数字显示顺序完全一致。
模板匹配
- 模板提取:对每个排序后的轮廓获取外接矩形,使用矩形坐标从原图截取
ROI区域:ref[y:y+h, x:x+w]。 - 统一
resize到标准尺寸(57,88)。 - 字典存储:创建
digits字典存储数字模板,键为数字(0-9),值为对应的ROI图像。 - 注意事项:必须使用
.copy()保留原始图像,每个数字模板尺寸需保持一致,建议在每步处理后显示中间结果验证正确性。
完整流程
- 轮廓检测
- 轮廓排序
- 提取模板
- 构建数字模板字典
知识小结表格
| 知识点 | 核心内容 | 易混淆点/注意事项 | 操作演示 |
|---|---|---|---|
| 轮廓检测 | 使用外轮廓检测功能,忽略内轮廓,用于计算外接矩形 | 必须使用.copy()避免引用问题;参数设置:CV_RETR_EXTERNAL(仅检测外轮廓) |
调用cv2.findContours()并指定mode=cv2.RETR_EXTERNAL |
| 轮廓排序 | 通过外接矩形左上角坐标(x,y)对轮廓进行排序 | 轮廓顺序不固定,需手动排序 | 使用cv2.boundingRect()获取坐标,按x轴排序 |
| 模板提取 | 从排序后的轮廓中截取ROI区域作为数字模板 | 需注意ROI边界(x:x+w, y:y+h);对抠图结果进行resize统一尺寸 |
切片操作:image[y:y+h, x:x+w]后调用cv2.resize() |
| 字典映射 | 建立数字(0-9)与对应模板图像的映射关系 | 枚举索引i需与排序后的轮廓严格对应 |
遍历轮廓并存储到字典:{i: ROI_image} |
| 调试技巧 | 实时显示轮廓/打印数量验证步骤正确性 | 负值参数(如-1)表示绘制全部轮廓 |
使用cv2.imshow()和print(len(contours))辅助调试 |
课时28:输入数据和识别结果_笔记
轮廓检测
绘制轮廓
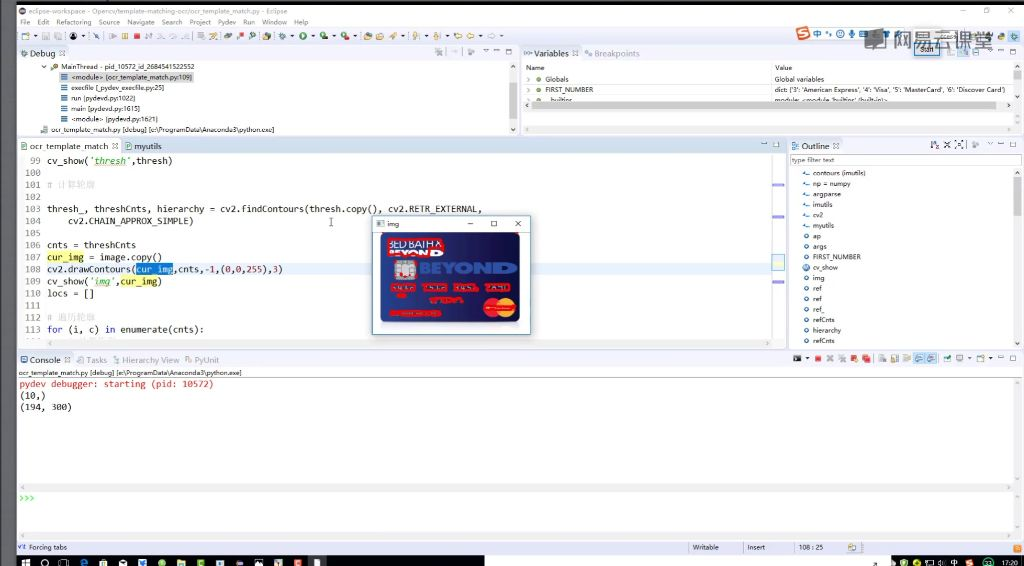
处理顺序在图像经过阈值化、形态学等预处理后才计算轮廓,绘制时选择在原始彩色图像上显示。
使用cv2.drawContours()函数,参数设置为-1表示绘制所有轮廓,(0,0,255)表示用红色绘制。
处理后会出现多个不规则轮廓,需要通过特征过滤保留有效轮廓(如信用卡数字区域)。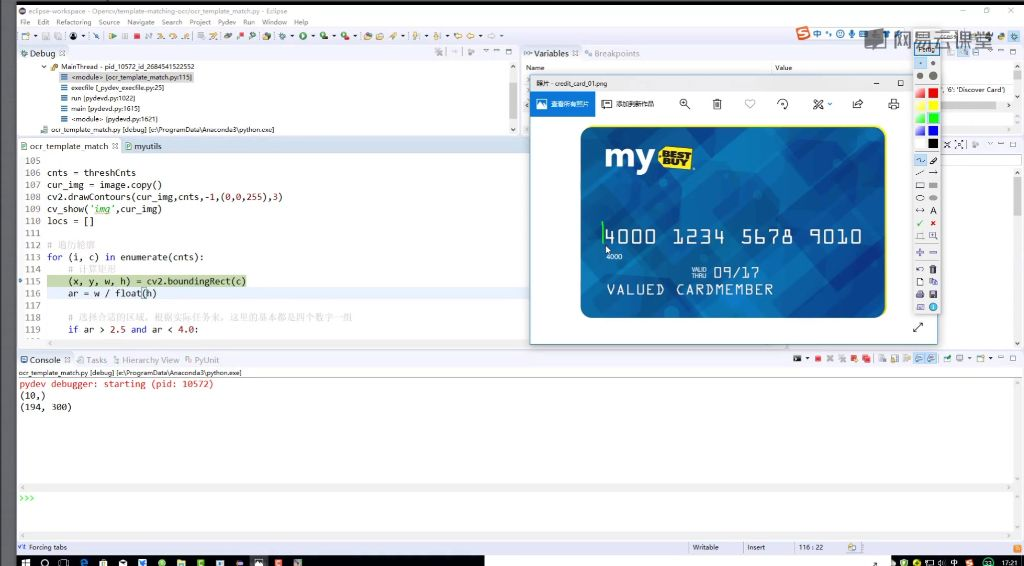
边界矩形
通过cv2.boundingRect()获取轮廓的外接矩形参数(x,y,w,h)。
计算宽高比,信用卡数字的典型范围为特定比例。
同时满足宽度像素和高度像素的条件,符合条件的轮廓坐标存入locs列表,每个元素为(x,y,w,h)四元组。
轮廓排序
检测到的4个数字轮廓需要按实际排列顺序(从左到右)进行排序。
通常根据轮廓的x坐标值进行升序排列。
排序后轮廓编号1-4对应实际卡号的数字顺序。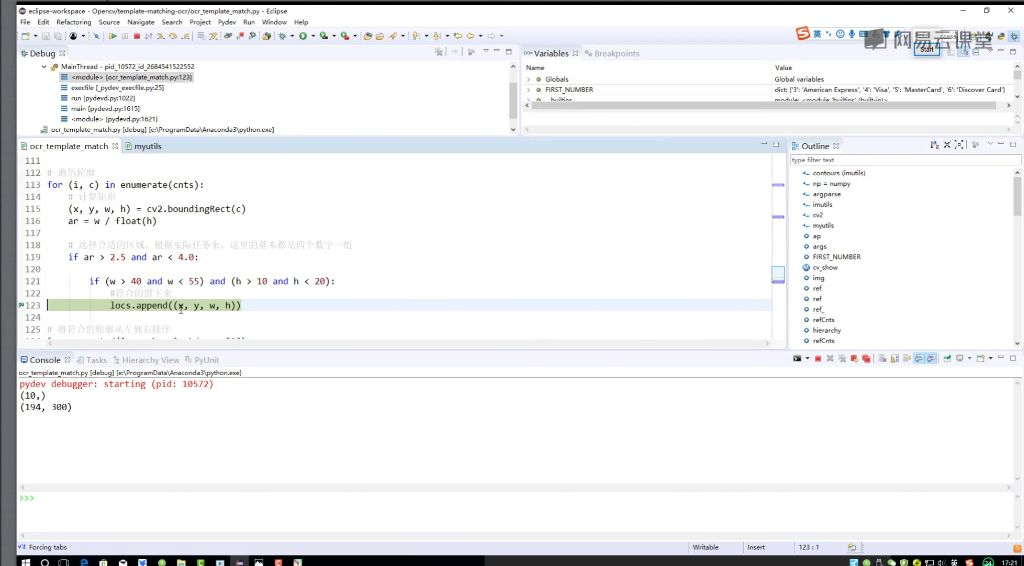
经过长宽比和尺寸双重筛选后,仅保留4个有效数字区域轮廓。
阈值参数需要根据具体任务调整,不同信用卡的字体尺寸可能有差异。
模板匹配
遍历轮廓数字
在大轮廓中分割出四个小轮廓,对每个小轮廓与0-9的模板数字进行匹配。
使用红色标记处理区域以提高可视性。
轮廓扩展技巧
在原始轮廓基础上向外扩展5个像素,确保完整包含数字特征。
避免因轮廓检测不精确导致的特征丢失。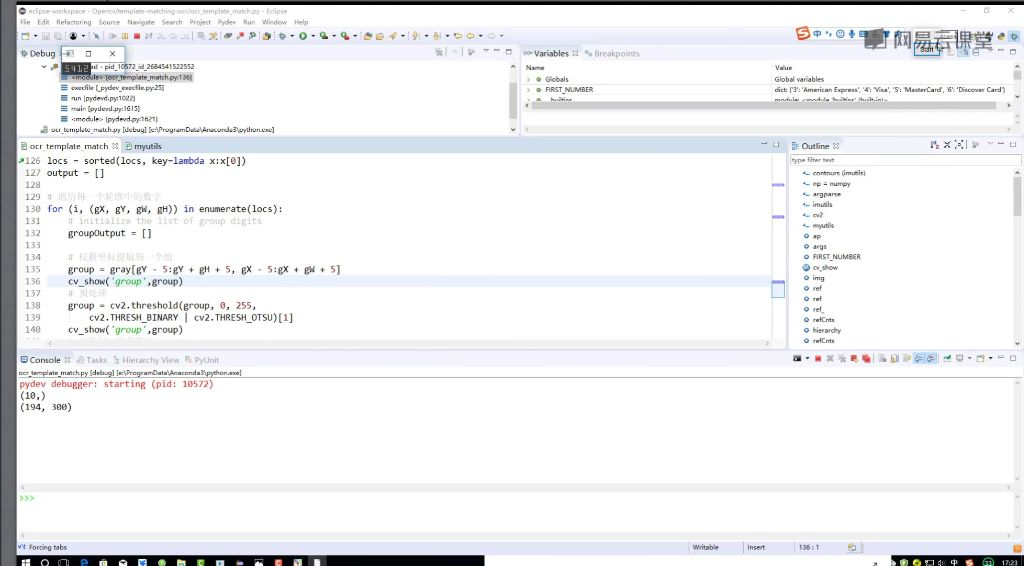
预处理步骤
二值化处理后进行轮廓检测,仅检测外轮廓。
轮廓排序从左到右排列检测到的数字轮廓。
模板匹配关键参数
将检测区域resize到与模板相同的57×88大小。
采用相关系数匹配法,通过获取最大匹配得分。
流程展示
模板准备阶段预处理参考图像,提取并排序0-9的数字模板存储为字典结构。
输入处理阶段读取信用卡图像,灰度化+二值化处理,形态学操作平滑图像。
数字识别阶段定位数字组区域,分割单个数字与模板匹配,计算得分取最高分作为识别结果。
结果可视化
用红色矩形框标记识别区域,在框上方显示识别结果。
最终输出信用卡类型和完整卡号。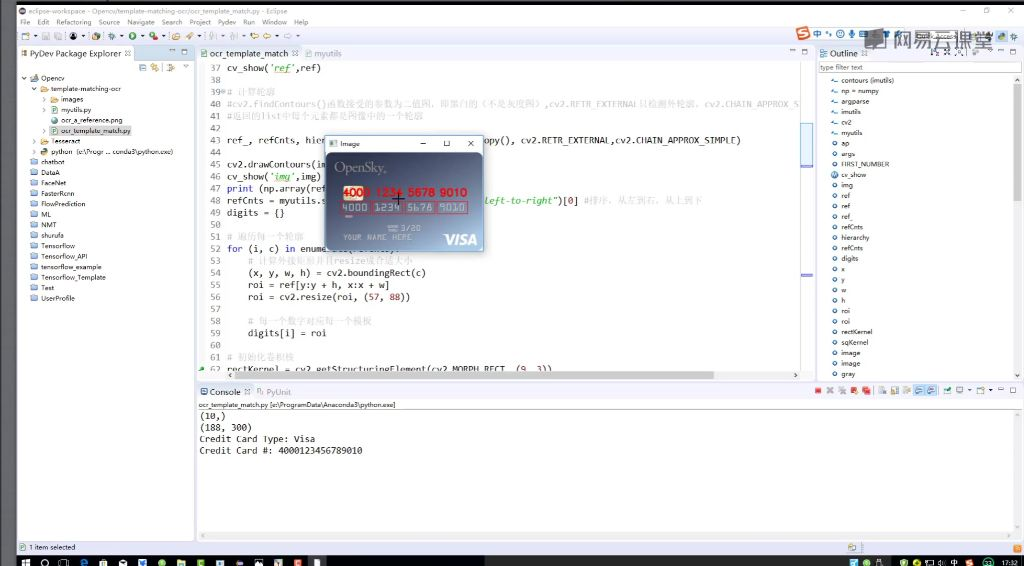
实际应用要点
相同模板可适用于不同信用卡,通过修改输入图像路径测试不同卡片。
扩展应用
适用场景包括车牌识别等类似场景,关键差异在于需要调整轮廓筛选条件。
改进方向可结合OCR技术提升准确率。
以下为整理后的表格形式呈现:
知识点核心内容与考试重点
| 知识点 | 核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|---|
| 形态学操作 | 使用不同大小的核进行图像预处理(9×3和5×5核) | 核大小的选择依据实际任务需求 | ⭐⭐ |
| 顶帽操作 | 突出图像中更明亮的区域(如字体区域) | 与底帽操作的区别及应用场景 | ⭐⭐ |
| 索贝尔算子 | 仅使用x方向梯度比xy联合效果更好 | 梯度方向选择的实验验证 | ⭐⭐⭐⭐ |
| 开闭运算 | 先膨胀后腐蚀(闭运算)使离散区域连成整体 | 开闭运算的先后顺序差异 | ⭐⭐ |
| 双峰阈值法 | 使用OTSU自动确定最佳阈值 | 与传统固定阈值法的对比 | ⭐⭐⭐⭐ |
| 轮廓检测 | 通过长宽比过滤无效轮廓(信用卡数字区域) | 轮廓层级关系的理解 | ⭐⭐⭐⭐ |
| 模板匹配 | 使用57×88标准化尺寸进行数字识别 | 匹配方法选择(相关系数法) | ⭐⭐⭐⭐ |
| ROI扩展技巧 | 轮廓坐标±5像素的边界扩展方法 | 扩展量与识别精度的平衡 | ⭐⭐ |
| 多级轮廓处理 | 先定位数字组再识别单个数字的两阶段策略 | 轮廓排序算法的实现 | ⭐⭐⭐⭐ |
| 实际应用验证 | 通过更换信用卡图片测试算法泛化能力 | 模板通用性与场景适应性 | ⭐⭐ |
表格说明
- 形态学操作:核尺寸需根据目标特征调整,如细长文本适合9×3核。
- 顶帽操作:常用于增强亮背景中的暗细节,易与底帽(突出暗背景中的亮区域)混淆。
- 索贝尔算子:x方向梯度对垂直边缘敏感,实际效果需通过实验验证。
- 双峰阈值法:OTSU适用于直方图呈双峰分布的图像,否则效果可能不佳。
- 轮廓层级:需理解
cv2.RETR_TREE等参数对嵌套轮廓的影响。
课时29:文档轮廓提取_笔记
文档轮廓提取
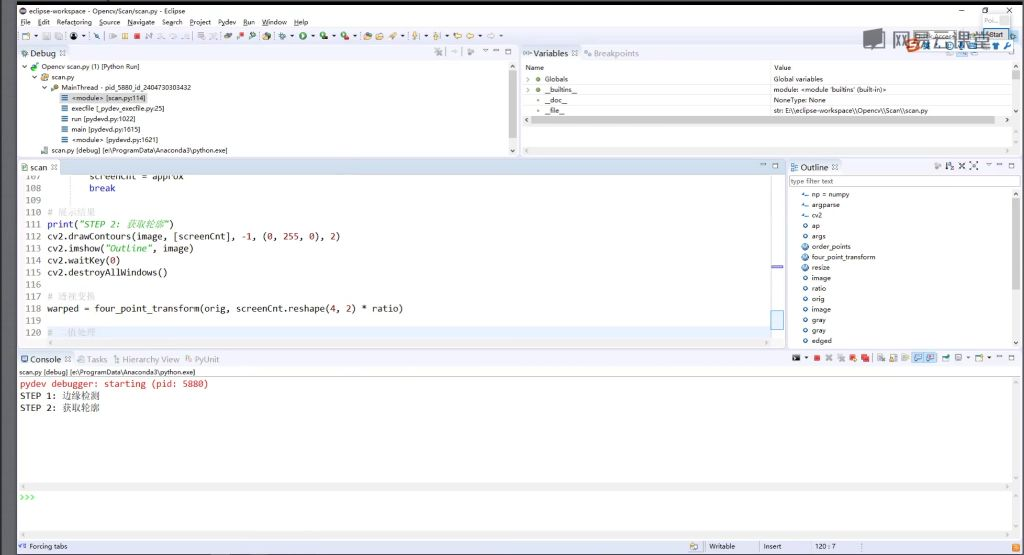
边缘检测
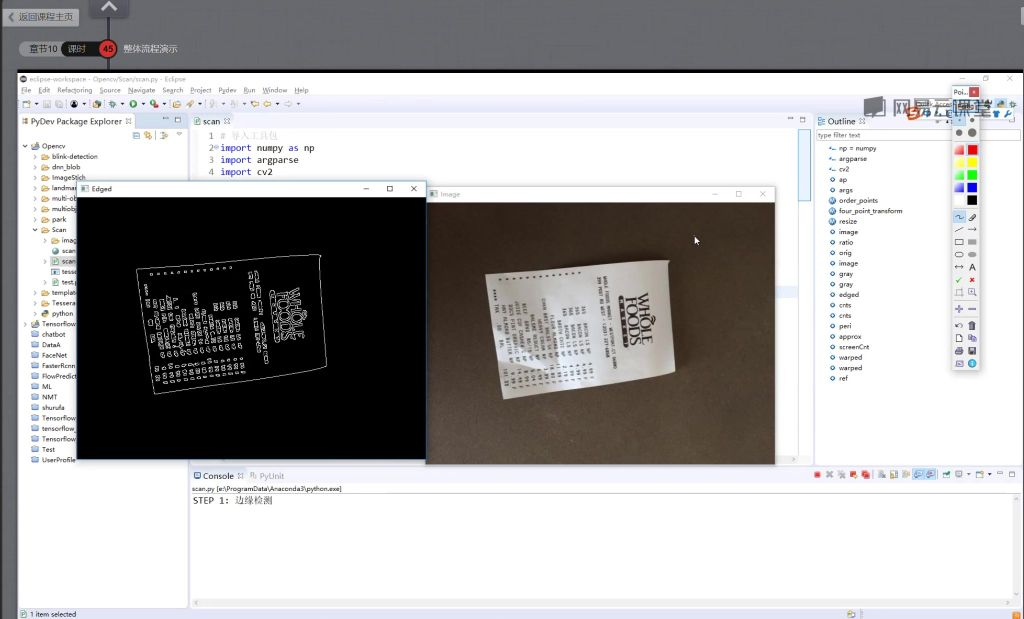
预处理步骤
转为灰度图:将图像从BGR转为灰度。
高斯滤波:去除噪声,常用(5,5)核大小。
Canny边缘检测:设置双阈值75和200进行边缘提取。
检测原理
通过红色框标识目标检测区域,过滤背景干扰。
关键参数:边缘检测结果直接影响后续轮廓提取的准确性。
获取轮廓
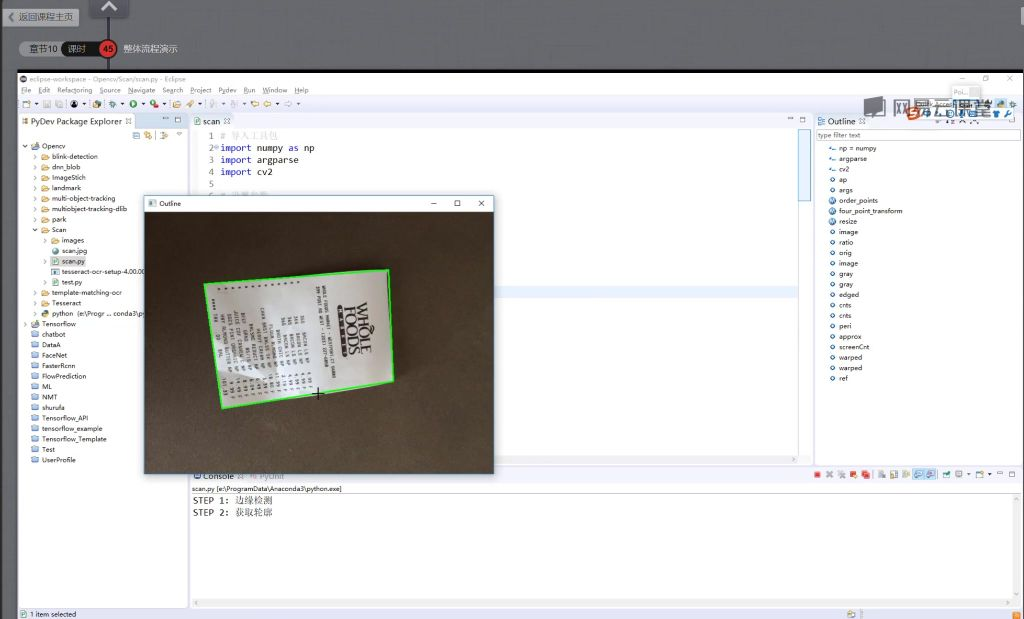
轮廓近似方法
使用多边形近似,精度控制为轮廓周长的2%作为近似阈值。
四点判断:当近似结果为4个点时即为目标矩形轮廓。
轮廓筛选
按面积或周长排序取前5个轮廓,通过绿色线条绘制最终轮廓。
特殊处理:对于多文档场景,可保留多个四点轮廓。
透视变换
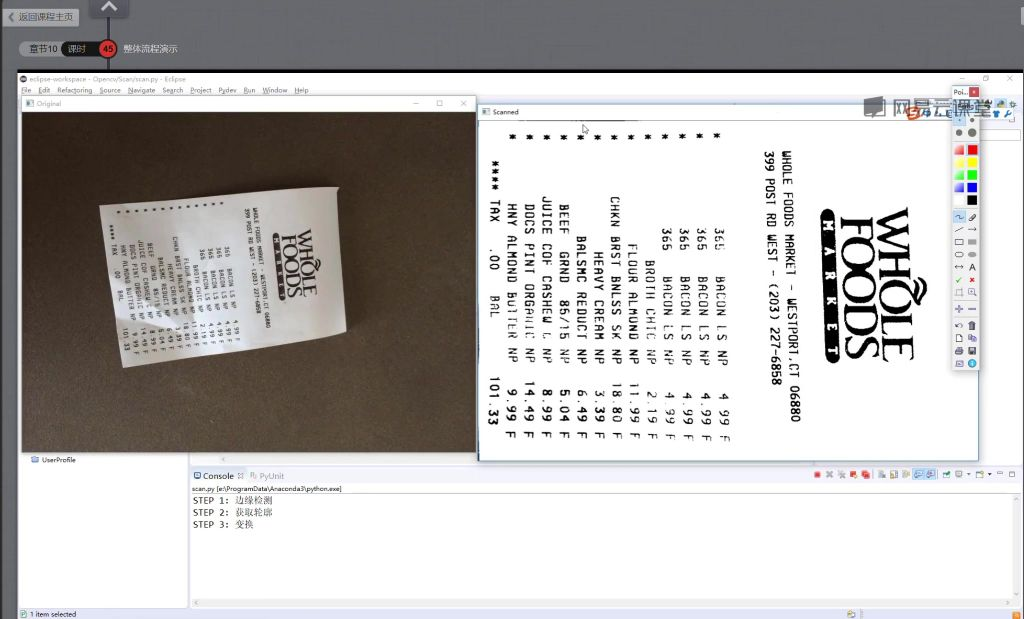
变换原理
包含平移、旋转、翻转等操作的复合变换。
计算变换矩阵并执行实际变换。
坐标处理
使用函数规范坐标顺序(左上、右上、右下、左下)。
变换后保持内容不变,仅改变呈现角度。
尺寸计算
通过欧式距离公式计算变换后图像的宽度和高度。
取最大宽度和高度作为输出尺寸。
文字识别
OCR工具
使用Tesseract OCR进行字符识别,支持中英文、数字混合识别。
需单独安装配置OCR引擎。
后处理
对变换结果进行二次图像增强,包括二值化、去噪等操作以提高识别率。
识别结果可结构化输出为文本数据。
应用案例
购物小票扫描处理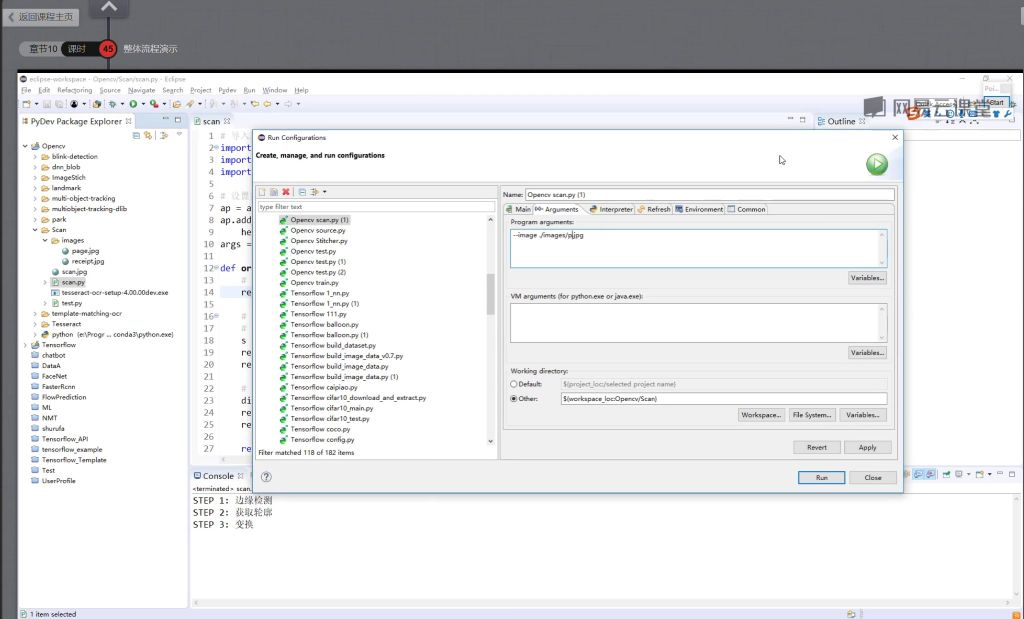
难点:任意角度拍摄导致的形变,复杂背景下的轮廓提取,小票内容的精确识别。
解决方案:通过边缘检测+轮廓近似定位小票区域,透视变换校正图像角度,OCR识别商品信息和价格。
阅读理解文档扫描
特殊处理:多段落文本的分区域处理,保持原始文档的版式结构,针对印刷体优化识别参数。
文档轮廓提取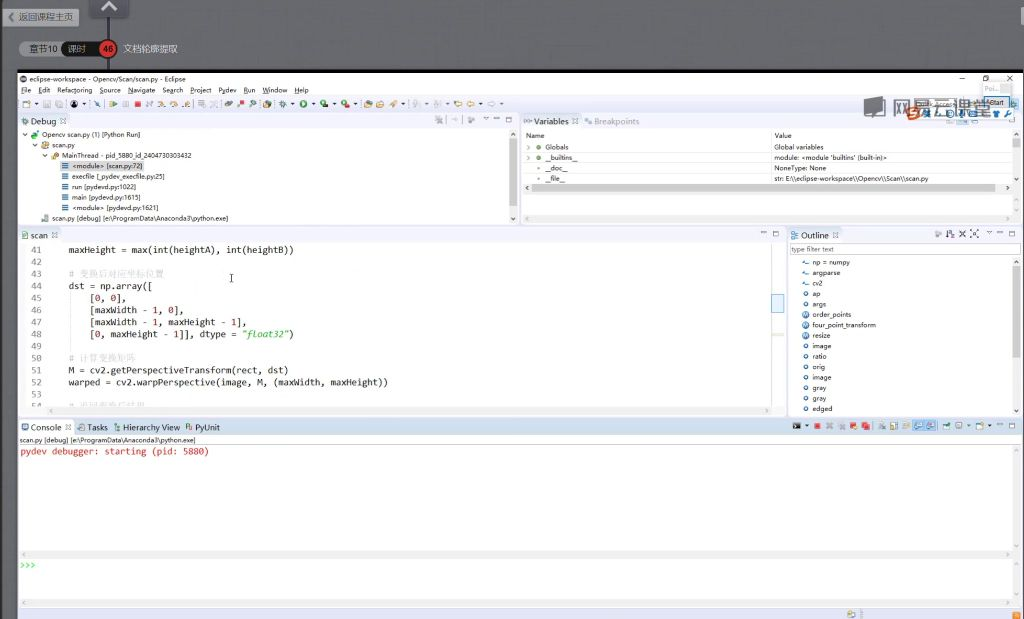
调试技巧:使用比例参数保持原图坐标关系,分步骤可视化中间结果,关键点坐标的规范化处理。
参数调整:边缘检测阈值的动态调整,轮廓近似精度的优化,输出尺寸的自适应计算。
文档扫描流程技术要点
| 核心内容 | 关键步骤/技术要点 | 应用场景 |
|---|---|---|
| 边缘检测 | 高斯滤波去噪 → 灰度转换 → Canny边缘检测 | 图像预处理阶段 |
| 轮廓检测 | 按面积/周长排序轮廓 → 多边形近似(4点判定矩形) | 目标区域提取 |
| 透视变换 | 计算原图与目标图4点坐标映射 → cv2.warpPerspective |
图像几何校正 |
| OCR集成 | 使用开源工具包(如Tesseract)处理透视变换结果 | 文字信息提取 |
参数调整优化方法
| 优化方向 | 具体实现 | 作用 |
|---|---|---|
| Resize比例计算 | 保持原始图像与坐标的同步缩放比例 | 避免坐标映射失真 |
| 轮廓近似精度控制 | 设置多边形近似阈值(通常为轮廓周长的2%) | 提高矩形区域判定精度 |
代码实现示例(边缘检测与透视变换)
import cv2
import numpy as np
# 边缘检测示例
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
edged = cv2.Canny(blurred, 75, 200)
# 透视变换示例
def four_point_transform(image, pts):
rect = order_points(pts)
(tl, tr, br, bl) = rect
width = max(np.linalg.norm(tr - tl), np.linalg.norm(br - bl))
height = max(np.linalg.norm(bl - tl), np.linalg.norm(br - tr))
dst = np.array([[0, 0], [width, 0], [width, height], [0, height]], dtype="float32")
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (int(width), int(height)))
return warped
技术要点说明
- Canny边缘检测:通过双阈值(低阈值75,高阈值200)控制边缘连接性,优先保留强边缘。
- 多边形近似:使用
cv2.approxPolyDP时,需根据轮廓周长动态调整epsilon值(如周长的2%)。 - 坐标映射同步:在图像缩放(resize)时,需同步调整轮廓坐标,防止透视变换错位。
课时30:原始与变换公式+透视变换结果_笔记
透视变换所需参数
两组坐标点:原始坐标通过轮廓检测获得的四个点(a,b,c,d),目标坐标是期望输出的标准矩形四点(e,f,g,h)。
比例因子用于将检测到的坐标点还原到原始图像尺寸,因为原始图像可能经过resize操作。
矩阵计算需要8个方程求解3×3变换矩阵,每组坐标点提供2个方程,因此需要4组坐标点。
透视变换过程
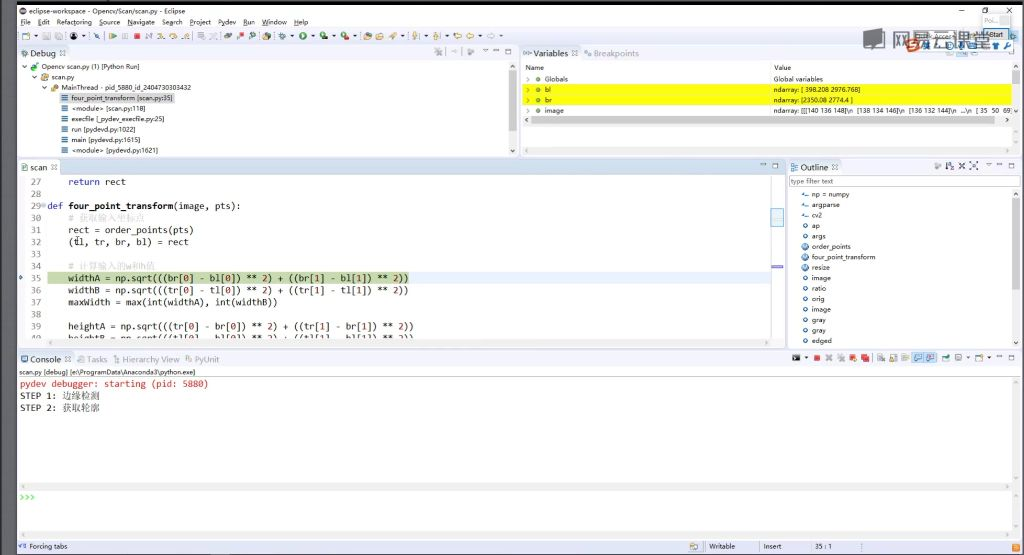
坐标排序按顺序排列为左上(tl)、右上(tr)、右下(br)、左下(bl)。
宽度计算取底边宽度(widthA)和顶边宽度(widthB)的最大值,高度计算取左侧高度(heightA)和右侧高度(heightB)的最大值。
目标坐标生成标准矩形坐标为:[0,0], [maxWidth-1,0], [maxWidth-1,maxHeight-1], [0,maxHeight-1],减1操作是为了避免数组越界。
坐标转换原理先将二维坐标转换为齐次坐标(增加z=1维度),通过3×3变换矩阵进行三维空间变换,最后将结果投影回二维平面。
矩阵求解条件要求四个原始点不能共线,必须构成四边形,OpenCV的getPerspectiveTransform函数自动完成矩阵计算。
代码执行结果
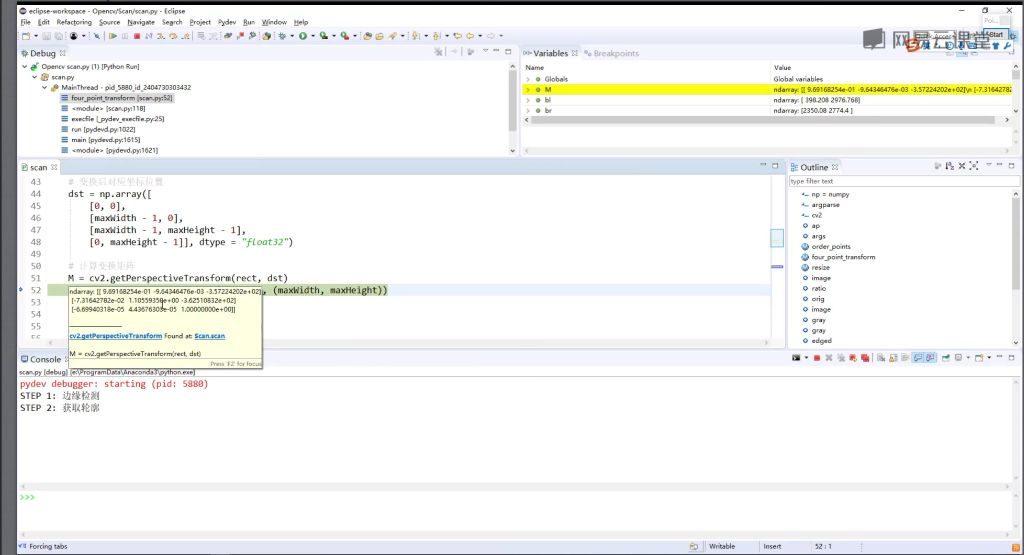
变换矩阵示例包含具体的数值示例。
后处理步骤包括灰度化将结果转换为单通道灰度图像,二值化使用阈值处理保留有效信息。
结果显示对比展示原始图像和变换后结果。 ### 应用场景
### 应用场景
文档扫描将倾斜文档转换为标准矩形。
OCR预处理为后续文字识别提供规整的输入图像。
图像校正修复透视变形问题。
以下是整理后的知识点表格:
透视变换技术要点总结
| 类别 | 核心内容 | 关键步骤/注意事项 |
|---|---|---|
| 原理 | 将歪斜图像转换为规整文档的坐标映射技术 | 需两组坐标:原始图像轮廓点 + 目标矩形点 |
计算宽度和高度时取最大值:max(w1,w2) 和 max(h1,h2) |
||
| 坐标点要求 | 必须提供4组非共线点(通常为矩形轮廓) | 点顺序需明确:左上→右上→右下→左下 |
| 每组点包含(x,y)坐标,共需8个方程解算变换矩阵 | ||
| 变换矩阵计算 | 通过cv2.getPerspectiveTransform()求解3×3齐次矩阵 |
输入原始坐标与目标坐标(如[(0,0), (w,0), (w,h), (0,h)]) |
| 矩阵含8个未知数,需归一化处理 | ||
| 图像后处理 | 灰度化+二值化以突出有效信息 | 透视变换后需调整显示范围(w-1, h-1防止越界) |
| 适用场景 | 文档扫描、OCR预处理 | 结果为字符识别提供规整输入 |
| OCR关联应用 | 需提取文本区域(如小票商品名、价格) | 技术栈组合:OpenCV透视变换 + OCR引擎(如Tesseract) |

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)