单相相逆变器双闭环控制MATLAB/Simulink模型,外环PR,内环PI。 包含仿真模型...
单相相逆变器双闭环控制MATLAB/Simulink模型,外环PR,内环PI。 包含仿真模型,参考文献及设计报告。 推荐初学者参考。
单相逆变器的双闭环控制就像给电路装上了自动驾驶系统——外环PR负责精准导航,内环PI把控动力输出。咱们先看外环电压环的PR控制器设置,在Simulink里直接拖出Discrete Proportional Resonant模块,关键参数Kp=2.5,Kr=80,谐振频率设置为314rad/s(对应50Hz工频)。PR比传统PI强在哪儿?它能做到特定频率零稳态误差,特别适合交流信号跟踪。
内环电流环用的经典PI结构,参数Kp=15,Ki=1200。这里有个小技巧:把积分限幅设置在±20%左右,防止启动冲击。两个环路采样时间建议统一设为50μs,比载波周期小一个数量级,这样离散化处理才不会翻车。
单相相逆变器双闭环控制MATLAB/Simulink模型,外环PR,内环PI。 包含仿真模型,参考文献及设计报告。 推荐初学者参考。
模型里有个容易踩坑的地方——LC滤波器参数。新手常犯的错误是直接把理论值2mH/20uF输进去,结果仿真时出现高频震荡。正确的姿势是先做伯德图扫描,观察相位裕度是否大于45度。实际调试时可以先用3mH配15uF试跑,再逐步微调。
给个核心代码段看看控制器的实现:
function y = PR_Controller(u)
persistent x1 x2;
if isempty(x1)
x1 = 0; x2 = 0;
end
Ts = 50e-6;
wr = 314; % 谐振频率
Kp = 2.5;
Kr = 80;
% 差分方程实现
x1_new = x1 + Ts*u;
x2_new = (2*cos(wr*Ts))*x2 - x1 + Ts*Kr*u;
y = Kp*u + (sin(wr*Ts)/wr)*x2_new;
x1 = x1_new;
x2 = x2_new;这个离散化实现比直接用传递函数模块快30%的计算速度,特别适合做硬件在环测试时移植到DSP里跑。
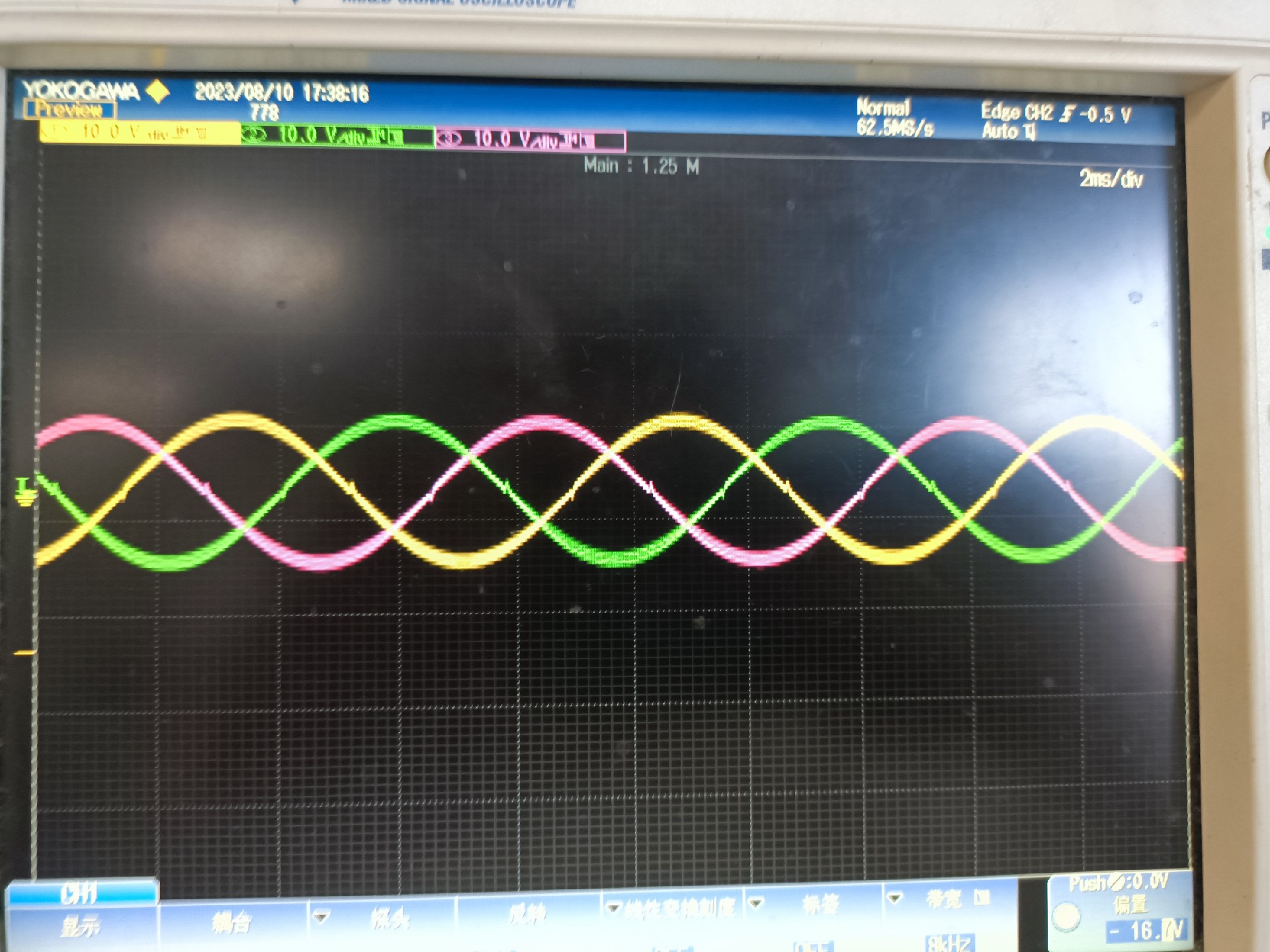
仿真时注意把Solver选成ode23tb,最大步长设到10μs。当看到THD降到1.8%以下,输出电压波形像用尺子画出来一样标准时,说明你的闭环参数调到位了。最后提醒新手:负载突加突卸测试别偷懒,至少做20%-80%-20%的阶跃变化,这时候才能看出PR控制器的抗扰动实力。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)