图像去雾算法的对比研究-opencv-python
·
1.直方图均衡化 (Histogram Equalization, HE)
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('city1.jpg',0)
equ = cv2.equalizeHist(img)
res = np.hstack((img,equ))
#stacking images side-by-side
cv2.imshow('img',res)
cv2.waitKey()
cv2.destroyAllWindows()
原图
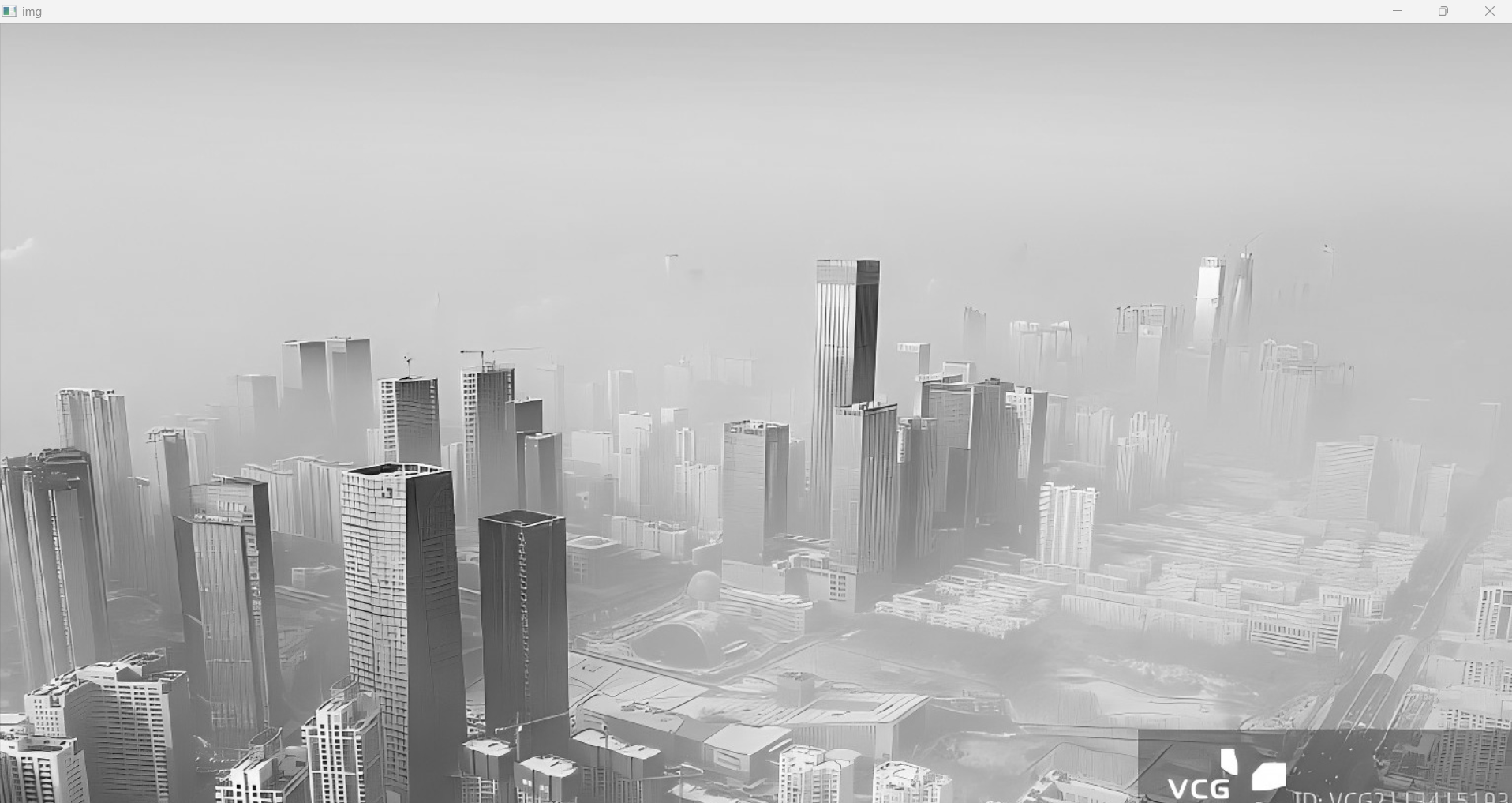
处理后
2.Retinex
import os
import cv2
import numpy as np
# 对图像进行单尺度 Retinex 处理
def single_scale_retinex(img, sigma):
retinex = np.log10(img) - np.log10(cv2.GaussianBlur(img, (0, 0), sigma))
return retinex
# 对图像进行多尺度 Retinex 处理
def multi_scale_retinex(img, sigma_list):
retinex = np.zeros_like(img)
for sigma in sigma_list:
retinex += single_scale_retinex(img, sigma)
retinex = retinex / len(sigma_list)
return retinex
# 进行颜色恢复
def color_restoration(img, alpha, beta):
img_sum = np.sum(img, axis=2, keepdims=True)
color_restoration = beta * (np.log10(alpha * img) - np.log10(img_sum))
return color_restoration
# 图像增强主函数,包括图像增强和颜色恢复
def retinex_process(img, sigma_list, G, b, alpha, beta):
img = np.float64(img) + 1.0
img_retinex = multi_scale_retinex(img, sigma_list)
img_color = color_restoration(img, alpha, beta)
img_retinex = G * (img_retinex * img_color + b)
# 将像素值限制在范围内
for i in range(img_retinex.shape[2]):
img_retinex[:, :, i] = np.clip(img_retinex[:, :, i], 0, 255)
img_retinex = np.uint8(img_retinex)
return img_retinex
def main():
# 读取图像
img = cv2.imread('city1.jpg')
# 尺度列表
sigma_list = [15, 80, 250]
# 增益参数
G = 5.0
# 偏置参数
b = 25.0
# 颜色恢复参数
alpha = 125.0
# 颜色恢复参数
beta = 46.0
# 进行图像增强
img_retinex = retinex_process(img, sigma_list, G, b, alpha, beta)
# 显示原始图像
cv2.imshow('1', img)
# 显示增强后的图像
cv2.imshow('Retinex', img_retinex)
# 等待按键
cv2.waitKey(0)
# 保存增强后的图片
cv2.imwrite('D:/images/retinex_image.jpg', img_retinex)
if __name__ == "__main__":
main()
if __name__ == "__main__":
main()
# 自动打开保存的图片(Windows 示例)
os.startfile('a.jpg') # Windows 专用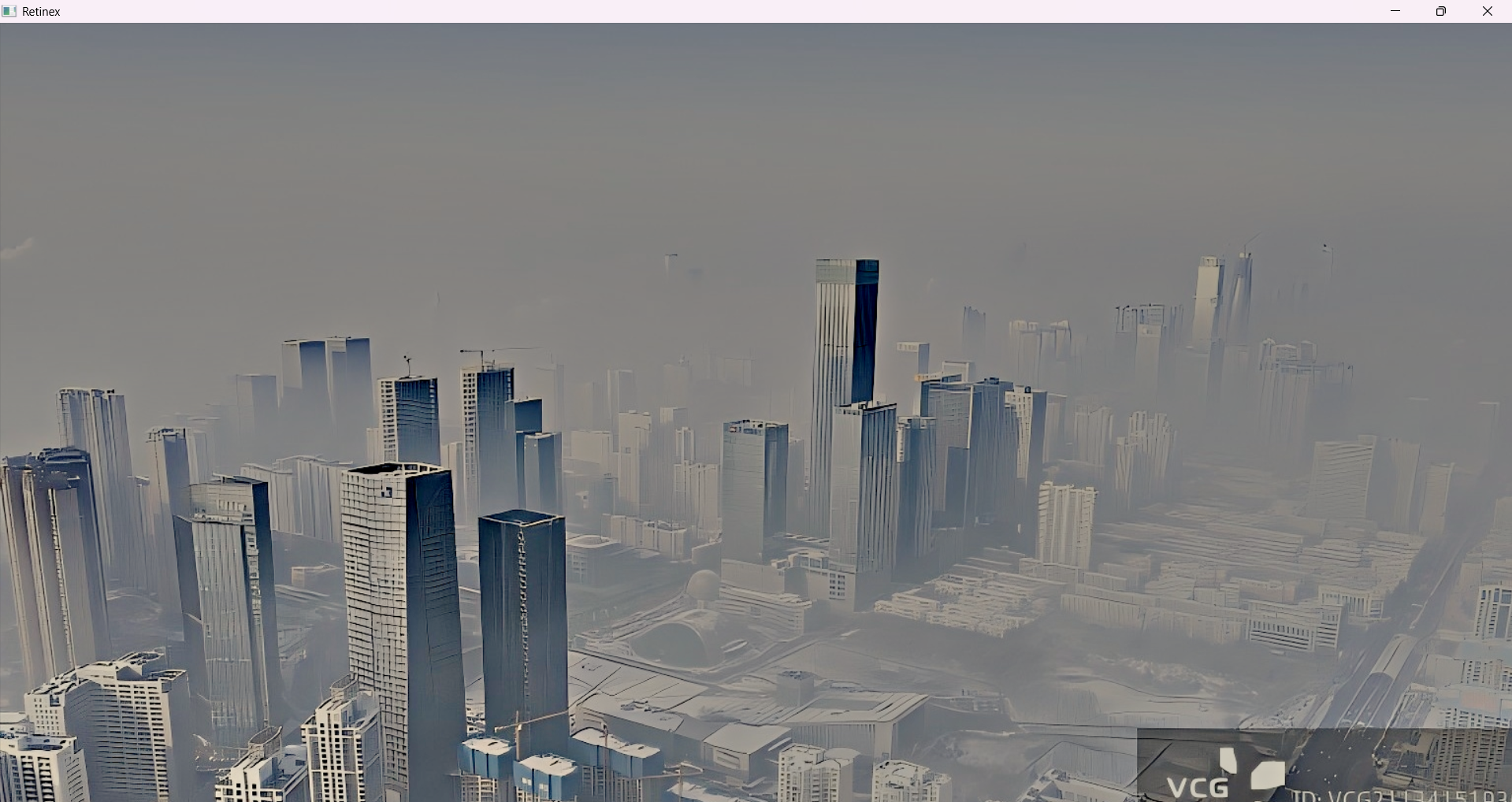
3.暗通道
import cv2
import numpy as np
def zmMinFilterGray(src, r=7):
return cv2.erode(src, np.ones((2 * r + 1, 2 * r + 1)))
def guidedfilter(I, p, r, eps):
m_I = cv2.boxFilter(I, -1, (r, r))
m_p = cv2.boxFilter(p, -1, (r, r))
m_Ip = cv2.boxFilter(I * p, -1, (r, r))
cov_Ip = m_Ip - m_I * m_p
m_II = cv2.boxFilter(I * I, -1, (r, r))
var_I = m_II - m_I * m_I
a = cov_Ip / (var_I + eps)
b = m_p - a * m_I
m_a = cv2.boxFilter(a, -1, (r, r))
m_b = cv2.boxFilter(b, -1, (r, r))
return m_a * I + m_b
def Defog(m, r, eps, w, maxV1): # 输入rgb图像,值范围[0,1]
'''计算大气遮罩图像V1和光照值A, V1 = 1-t/A'''
V1 = np.min(m, 2)
max_values = np.max(m, axis=2)
# 得到暗通道图像
Dark_Channel = zmMinFilterGray(V1, 7)
cv2.imshow('V1', V1)
cv2.imshow('20190708_Dark',Dark_Channel) # 查看暗通
cv2.waitKey(0)
cv2.destroyAllWindows()
V1 = guidedfilter(V1, Dark_Channel, r, eps) # 使用引导滤波优化
bins = 2000
ht = np.histogram(V1, bins)
d = np.cumsum(ht[0]) / float(V1.size)
for lmax in range(bins - 1, 0, -1):
if d[lmax] <= 0.999:
break
A = np.mean(m, 2)[V1 >= ht[1][lmax]].max()
V1 = np.minimum(V1 * w, maxV1) # 对值范围进行限制
return V1, A
def deHaze(m, r=15, eps=0.001, w=0.95, maxV1=0.80, bGamma=False):
Y = np.zeros(m.shape)
Mask_img, A = Defog(m, r, eps, w, maxV1) # 得到遮罩图像和大气光照
for k in range(3):
print((m[:,:,k] - Mask_img))
Y[:,:,k] = (m[:,:,k] - Mask_img)/(1-Mask_img/A) # 颜色校正
Y = np.clip(Y, 0, 1)
if bGamma:
Y = Y ** (np.log(0.5) / np.log(Y.mean())) # gamma校正,默认不进行该操作
return Y
if __name__ == '__main__':
m = (deHaze(cv2.imread(r'city1.jpg') / 255.0) * 255).astype(np.uint8)
cv2.imshow("ccccc",m)
cv2.waitKey(0)
# cv2.imwrite('20190708_02.png', m)
V1
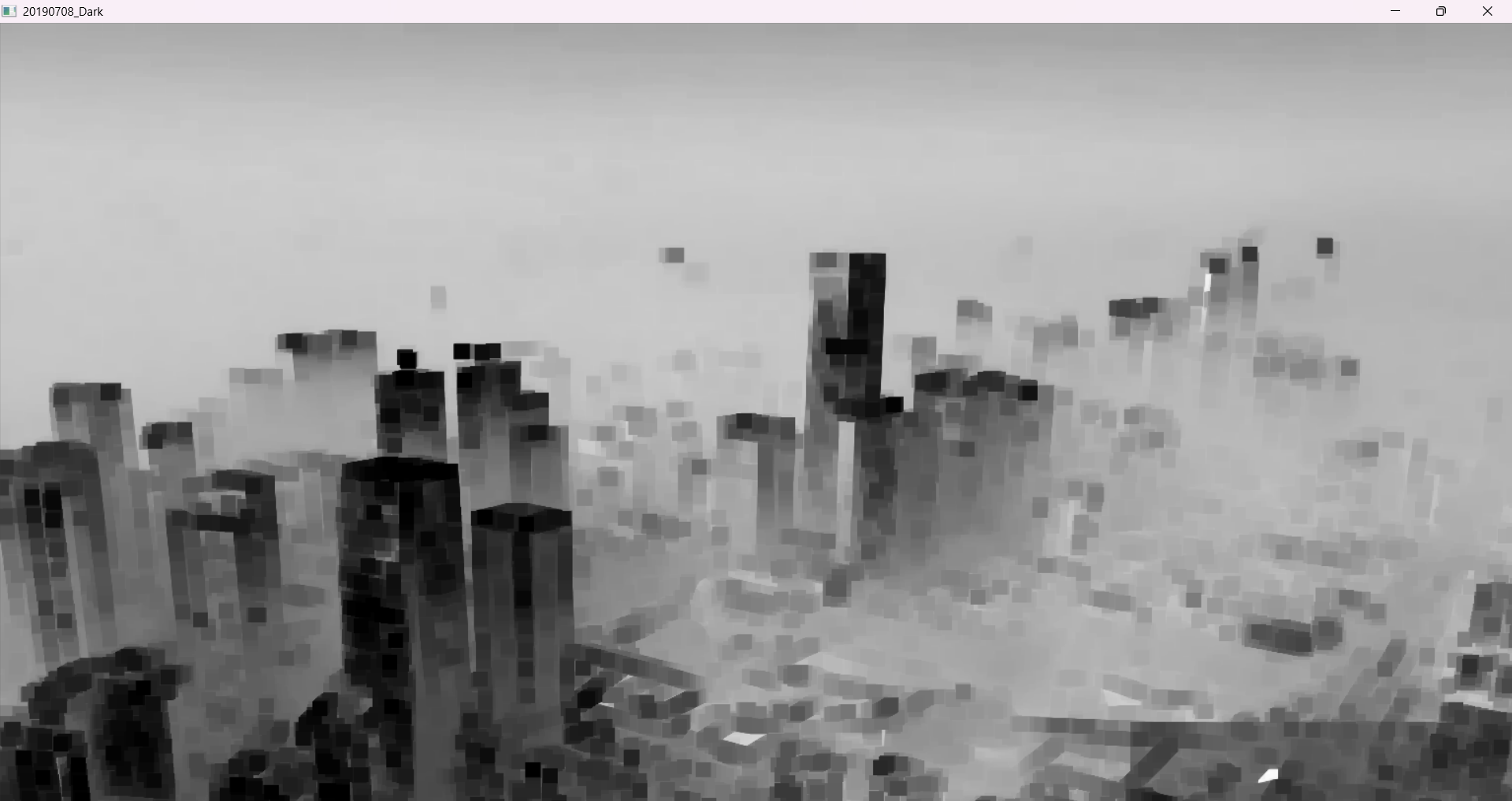
过程图
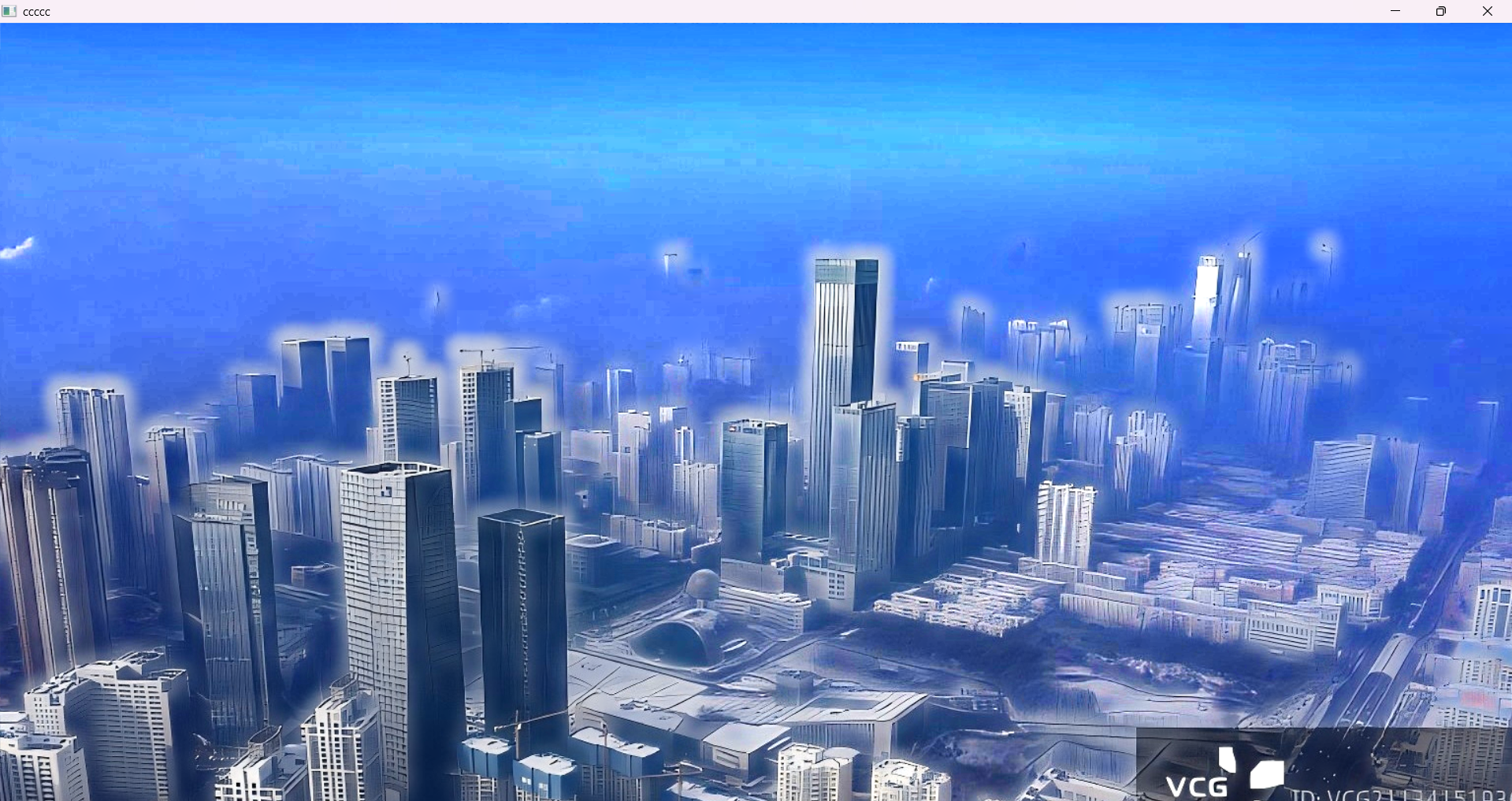
结果图

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)