锁相环在并网电压源变换器变流器中的暂态稳定性分析与弱电网下的相图法研究
·
锁相环对并网电压源变换器变流器的暂态稳定分析(文章完全浮现)。 关键词:暂态稳定,锁相环,相图法,弱电网。
最近在调试风电场的并网变流器时,发现锁相环在电网电压跌落时的表现有点邪门。原本稳定的系统突然开始抽风,相位角像脱缰野马似的乱窜,最后直接把IGBT模块给炸了。这事儿让我意识到,传统的小信号模型在弱电网场景下可能不太靠谱。
锁相环这玩意儿本质上是个相位追踪系统。咱们用MATLAB搭个简化模型试试:
function dydt = pll_model(t,y,vg)
omega_n = 50*2*pi; % 额定频率
kp = 0.5; % 比例系数
ki = 30; % 积分系数
theta_pll = y(1);
xi = y(2);
vq = vg(t)*sin(theta_pll); % 正交分量
dydt = [omega_n + kp*vq + xi;
ki*vq]; % 积分环节
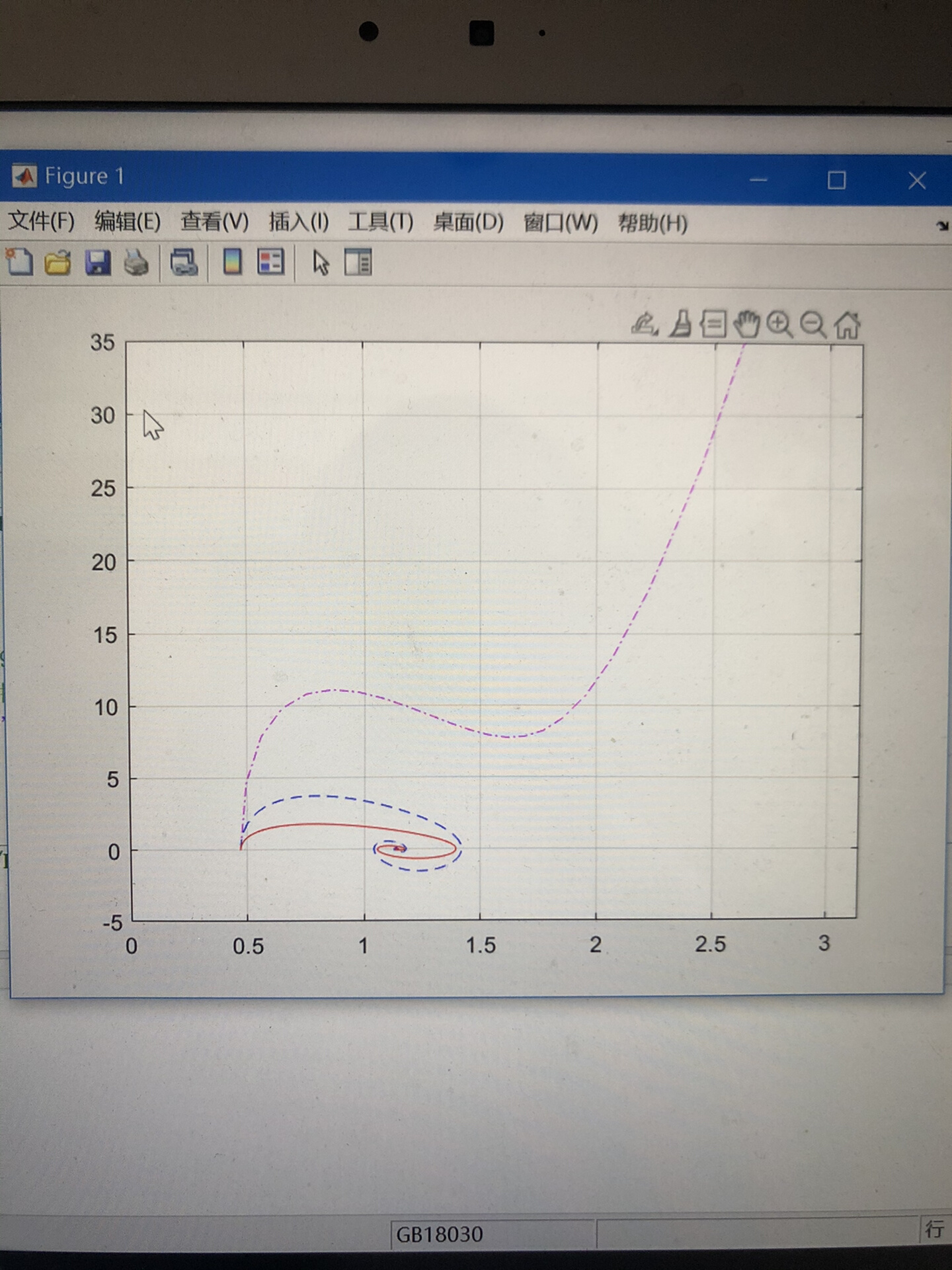
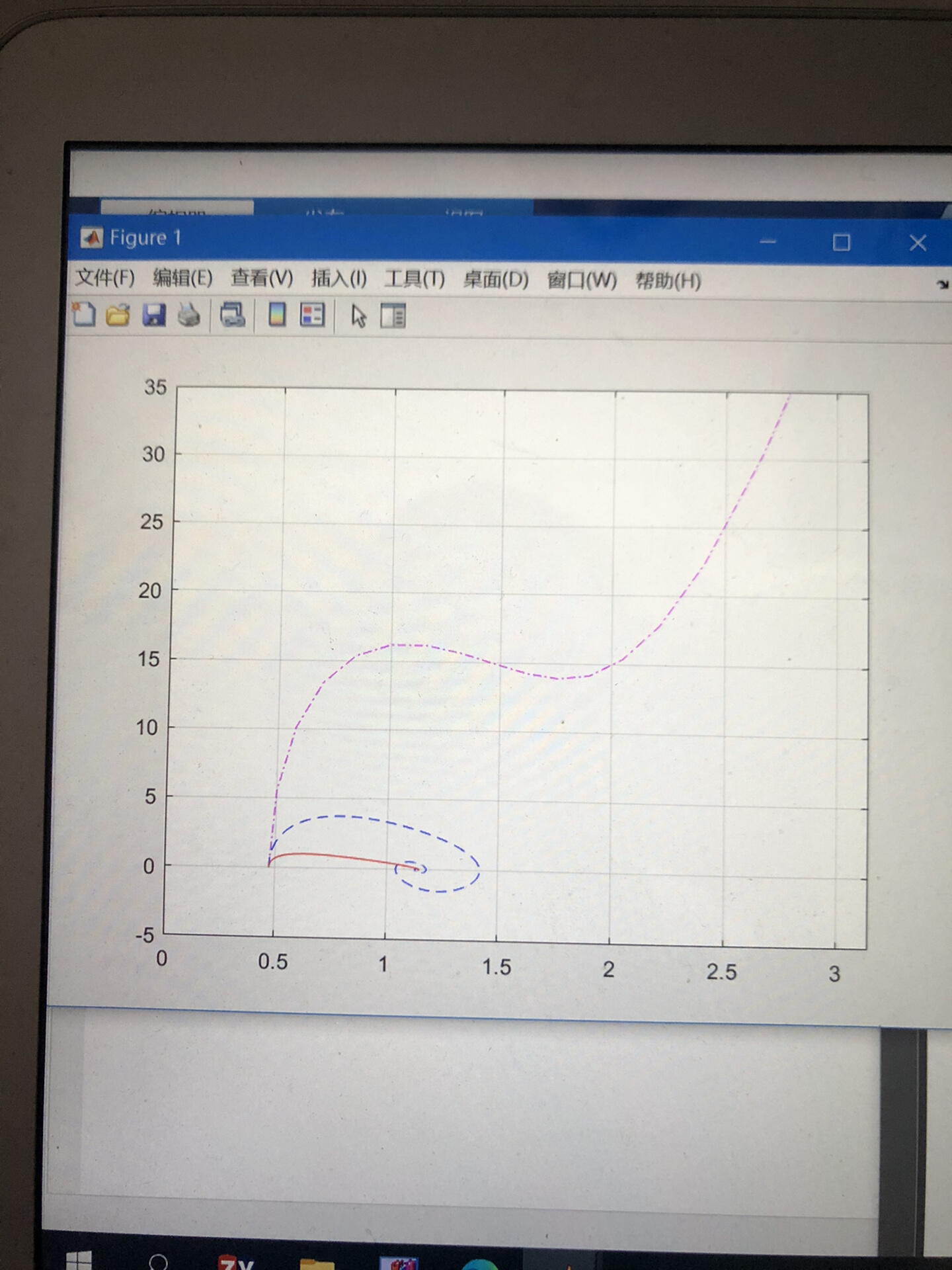
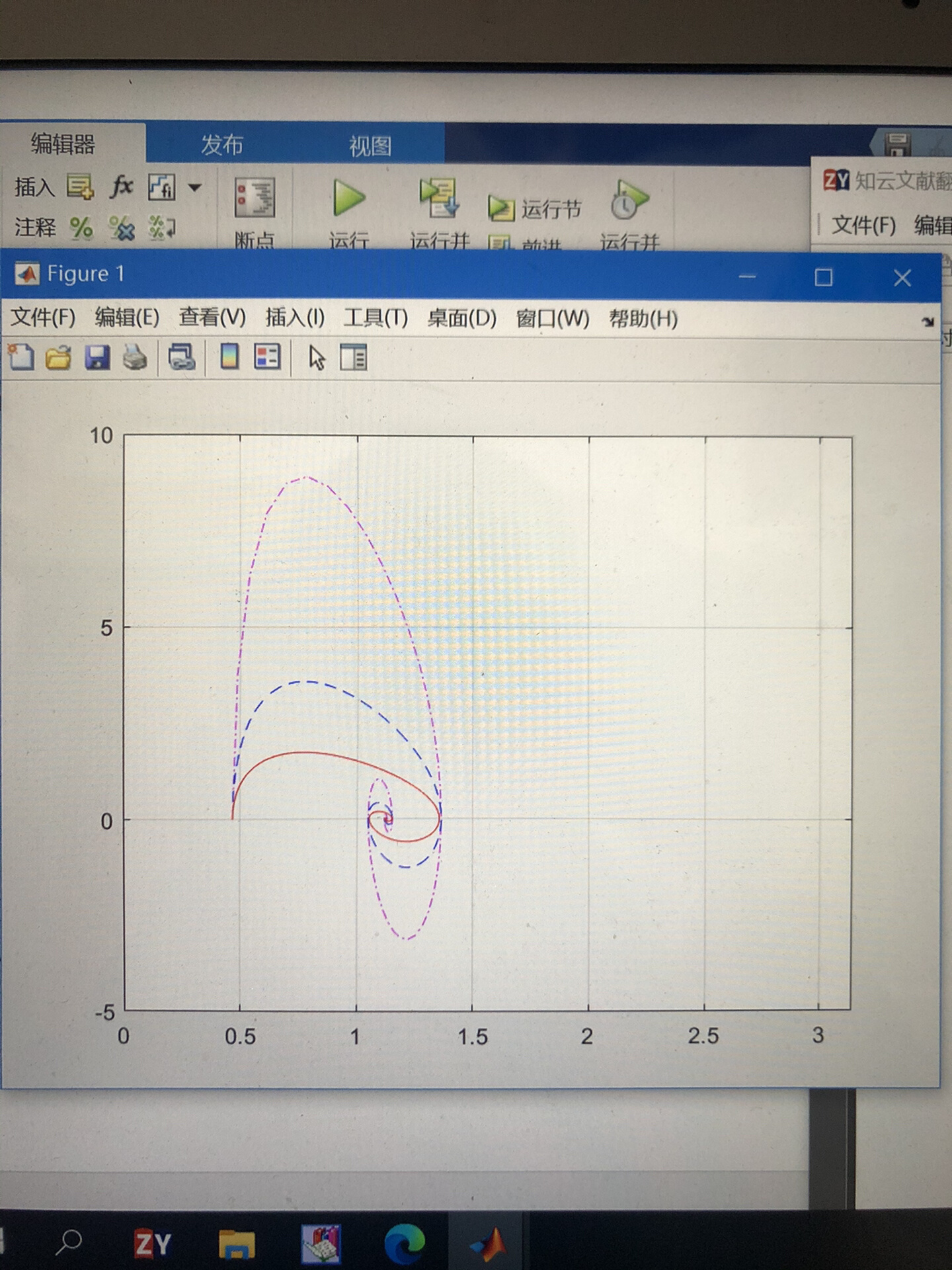
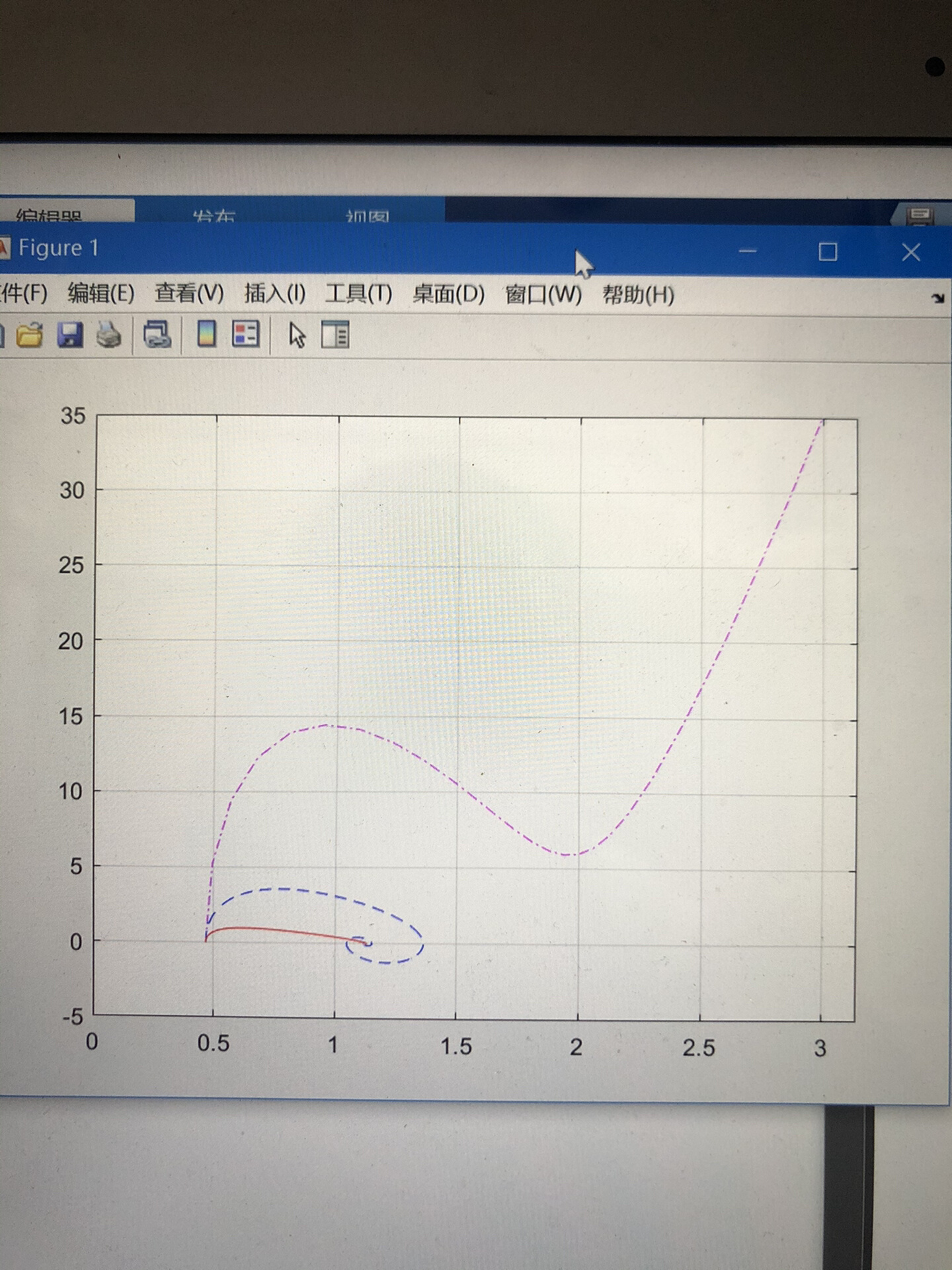
end这个模型里有个隐藏的坑——当电网阻抗变大时(弱电网),锁相环的动态响应会从温顺的小猫变成暴走的猛兽。咱们用相图法看看系统状态的变化轨迹:
def plot_phase_portrait():
grid_strength = 0.3 # 0.3 pu的短路比
phase_angles = np.linspace(-np.pi, np.pi, 20)
freq_deviations = np.linspace(-10, 10, 20)
plt.figure(figsize=(10,6))
for theta in phase_angles:
for domega in freq_deviations:
vq = grid_strength * np.sin(theta)
dtheta = 50*2*np.pi + 0.5*vq + domega
ddomega = 30*vq
# 绘制箭头
plt.quiver(theta, domega, dtheta, ddomega*0.1,
color='steelblue', alpha=0.6)
plt.xlabel('Phase error (rad)')
plt.ylabel('Frequency deviation (Hz)')
plt.title('PLL Phase Portrait under Weak Grid')跑出来的相图会显示两种典型模式:当相位误差较小时,箭头都指向稳定平衡点;但当误差超过临界值时,箭头开始呈发散趋势。这解释了为什么电网故障时锁相环容易失控——系统状态被推离了稳定吸引域。
现场调试时有个实用技巧:在锁相环输出端加个非线性观测器。当检测到相角变化率超过阈值时,自动切换控制模式。这里有个DSP实现的代码片段:
// 在中断服务程序中
float track_phase_error(float measured_angle) {
static float prev_angle = 0.0f;
float delta = measured_angle - prev_angle;
// 非线性修正项
if(fabsf(delta) > CRITICAL_SLOPE) {
float correction = sign(delta) * SOFT_LIMIT;
measured_angle = prev_angle + correction;
}
prev_angle = measured_angle;
return measured_angle;
}这个trick本质上是在相轨迹即将冲出稳定区时,给系统加了个"软围栏"。就像给狂奔的野马套上弹性缰绳,既允许必要的位置调整,又防止完全失控。实测显示,加入该策略后系统在SCR=1.2的极端弱电网下仍能保持稳定。
搞明白锁相环的暂态行为后,再回头看变流器的整体控制策略,会发现很多传统设计假设都需要重新审视。比如常规的电流环带宽设计,在弱电网下可能要和锁相环动态特性做联合优化。这就像跳探戈,两个控制环节的配合比单独表现更重要。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)