基于准谐振控制器的永磁同步电机电流环谐波抑制之旅
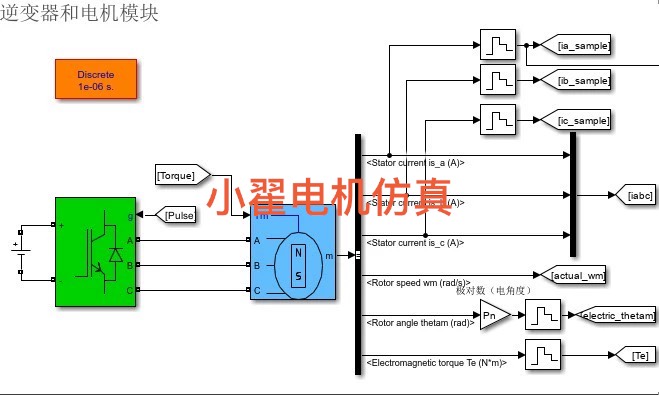
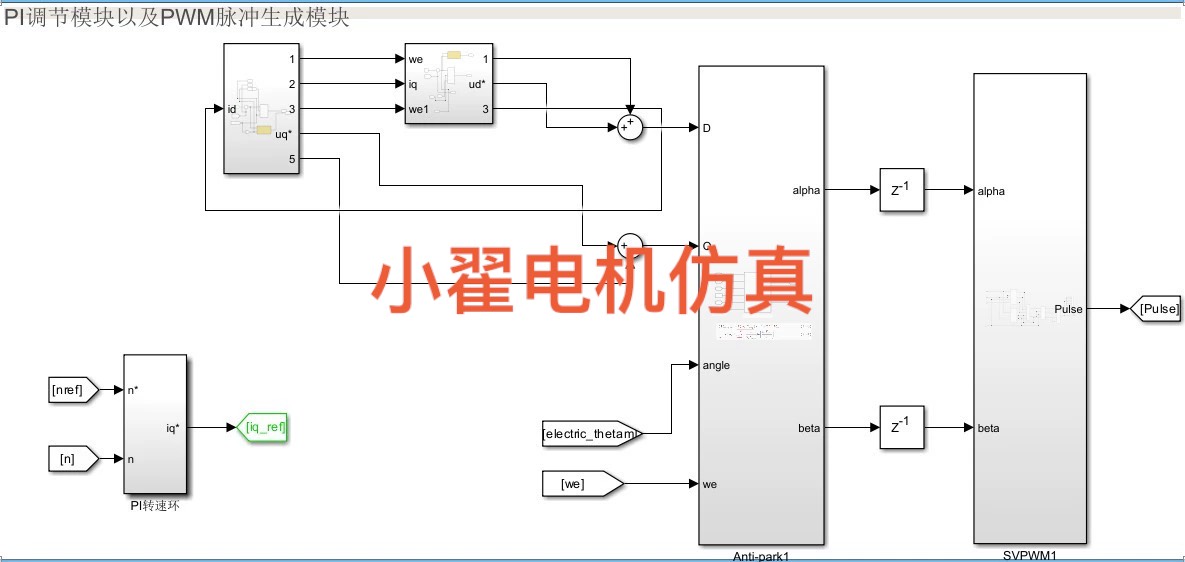
基于准谐振控制器(QPR/QGI)的永磁同步电机(PMSM)电流环谐波抑制仿真模型 内含: 1、系统1.5延迟及延迟补偿模块 2、转速滤波模块(包括离散化低通滤波器) 3、准谐振控制器 4、完全离散化的PMSM整体结构框图 5、死区模块 1,谐波产生原因及影响:PMSM运行时受到逆变器的非线性因素影响导致电机定子电流产生谐波,使电机产生额外损耗 2,传统 PI控制器不能无静差跟踪交流信号,会导致谐波检测精度不高 3,仿真原理:采用准谐振控制器,分别抑制5 次和 7 次谐波,并将其作为补偿量注入到电流环 PI 控制器的输出电压中,降低电机定子绕组电流的谐波含量 4,仿真效果:通过对比谐波抑制前后的电流波形,基于准谐振控制器的 PMSM 谐波抑制策略可以有效抑制电机定子电流谐波,效果见图片 5,资料内容:仿真模型+完美复现的一篇TIE顶刊论文,文献很经典非常有价值
在永磁同步电机(PMSM)的运行过程中,谐波问题一直是让人头疼的存在。今天咱们就深入探讨基于准谐振控制器(QPR/QGI)的 PMSM 电流环谐波抑制仿真模型。
谐波:从何而来,又有何影响?
PMSM 运行时,逆变器的非线性因素就像个捣乱分子,导致电机定子电流产生谐波。这些谐波可不是省油的灯,它们会让电机产生额外损耗,就好比汽车发动机里进了杂质,不仅影响效率,还可能缩短电机寿命。
传统的 PI 控制器在面对交流信号时,就像个近视眼看不清远处的东西,不能无静差跟踪交流信号,这就使得谐波检测精度大打折扣。
仿真原理:准谐振控制器来救场
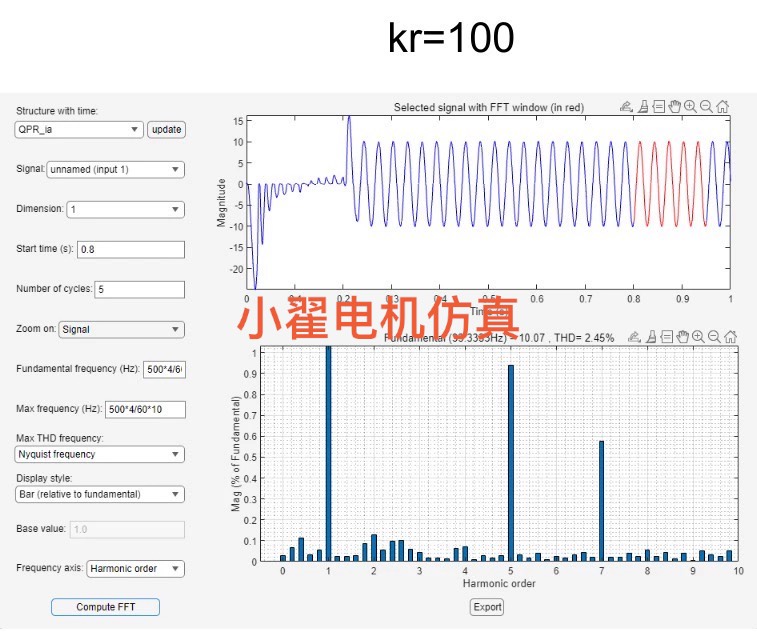
咱们采用的准谐振控制器,就像是给 PMSM 配备了一个精准的谐波狙击手,专门抑制 5 次和 7 次谐波。它具体是怎么做的呢?先看代码片段:
# 假设这里是准谐振控制器部分代码
def qpr_controller(frequency, gain, q_factor):
omega = 2 * np.pi * frequency
alpha = np.sin(omega) / (2 * q_factor)
b0 = gain * (1 - np.cos(omega))
b1 = 2 * gain * (np.cos(omega) - 1)
b2 = gain * (1 - np.cos(omega))
a1 = -2 * np.cos(omega)
a2 = 1 - alpha
return [b0, b1, b2], [1, a1, a2]这段代码定义了一个准谐振控制器函数,通过输入频率、增益和品质因数,计算出控制器的系数。这里的频率就是我们要抑制的谐波频率,比如 5 次和 7 次谐波对应的频率。通过调整这些参数,准谐振控制器就能对特定谐波进行有效抑制。
基于准谐振控制器(QPR/QGI)的永磁同步电机(PMSM)电流环谐波抑制仿真模型 内含: 1、系统1.5延迟及延迟补偿模块 2、转速滤波模块(包括离散化低通滤波器) 3、准谐振控制器 4、完全离散化的PMSM整体结构框图 5、死区模块 1,谐波产生原因及影响:PMSM运行时受到逆变器的非线性因素影响导致电机定子电流产生谐波,使电机产生额外损耗 2,传统 PI控制器不能无静差跟踪交流信号,会导致谐波检测精度不高 3,仿真原理:采用准谐振控制器,分别抑制5 次和 7 次谐波,并将其作为补偿量注入到电流环 PI 控制器的输出电压中,降低电机定子绕组电流的谐波含量 4,仿真效果:通过对比谐波抑制前后的电流波形,基于准谐振控制器的 PMSM 谐波抑制策略可以有效抑制电机定子电流谐波,效果见图片 5,资料内容:仿真模型+完美复现的一篇TIE顶刊论文,文献很经典非常有价值
准谐振控制器把抑制后的谐波作为补偿量,注入到电流环 PI 控制器的输出电压中,就像给有瑕疵的产品补上完美的补丁,从而降低电机定子绕组电流的谐波含量。
系统模块解析
1.5 延迟及延迟补偿模块
在整个系统中,1.5 延迟就像是跑步比赛中的短暂停顿,会影响系统的实时性。而延迟补偿模块就是要把这个停顿的时间给追回来。代码实现可能如下:
# 简单的延迟补偿代码示意
def delay_compensation(input_signal, delay_samples):
compensated_signal = np.zeros(len(input_signal))
for i in range(len(input_signal)):
if i >= delay_samples:
compensated_signal[i] = input_signal[i - delay_samples]
return compensated_signal这个代码通过简单的移位操作,对输入信号进行延迟补偿,让系统能够更准确地处理信号。
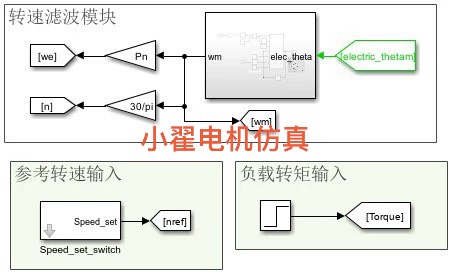
转速滤波模块
转速滤波模块里的离散化低通滤波器,就像一个滤网,把高频的噪声过滤掉,只留下我们需要的转速信息。下面是一个简单的离散化低通滤波器代码示例:
def discrete_lowpass_filter(input_signal, cutoff_frequency, sampling_frequency):
omega_c = 2 * np.pi * cutoff_frequency / sampling_frequency
alpha = np.sin(omega_c) / (np.sin(omega_c) + np.cos(omega_c))
filtered_signal = np.zeros(len(input_signal))
filtered_signal[0] = input_signal[0]
for i in range(1, len(input_signal)):
filtered_signal[i] = alpha * input_signal[i] + (1 - alpha) * filtered_signal[i - 1]
return filtered_signal这里通过设置截止频率和采样频率,计算出滤波器系数,对输入信号进行滤波处理,让转速信息更纯净。
死区模块
死区模块在逆变器中是为了防止上下桥臂直通,但它也间接导致了谐波的产生。虽然死区是必要的“恶魔”,但我们通过前面的准谐振控制器等模块来尽量降低它带来的谐波影响。
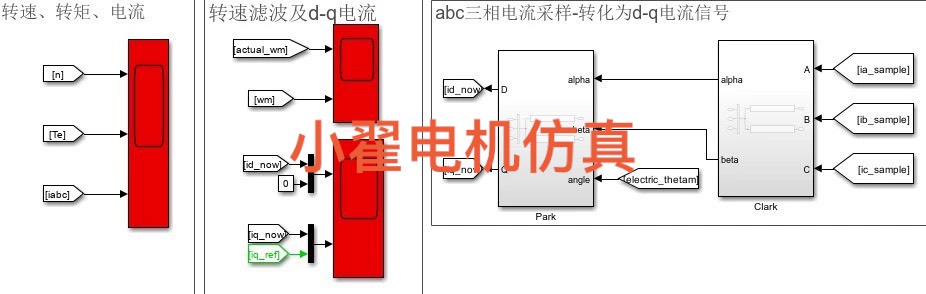
完全离散化的 PMSM 整体结构框图
这就像是整个系统的地图,各个模块在图中各就各位,协同工作。从转速滤波到准谐振控制,再到延迟补偿,每个模块都在为降低谐波含量而努力。这种完全离散化的设计,让系统在数字信号处理中有更好的表现。
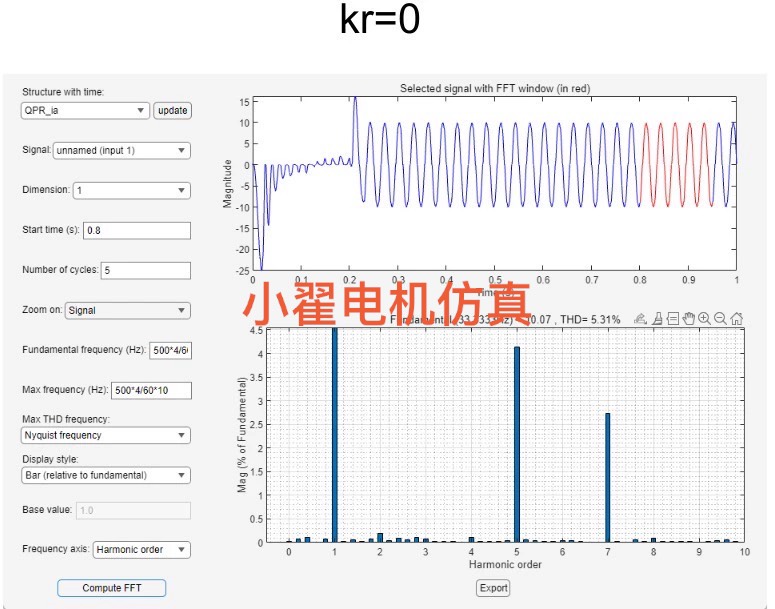
仿真效果:眼见为实
通过对比谐波抑制前后的电流波形,基于准谐振控制器的 PMSM 谐波抑制策略效果显著。从图片中可以清晰看到,抑制前的电流波形就像崎岖的山路,而抑制后的波形变得平滑很多,就像高速公路。这表明我们的准谐振控制器成功完成了谐波抑制的使命。
这次仿真模型还有一篇能完美复现的 TIE 顶刊经典论文作为资料支撑,这文献价值满满,对深入研究 PMSM 电流环谐波抑制非常有帮助。希望大家也能从这个仿真模型中收获到关于 PMSM 谐波抑制的宝贵经验。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 12
12 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)