树莓派+ROS2 摄像头接入实操全解析(无图形桌面版Linux适配)
本文基于树莓派4B+Ubuntu 22.04 LTS Server(无图形桌面版,ROS2 Humble Hawksbill)系统,详细阐述USB摄像头的驱动适配、ROS2功能包部署、节点启动及图像采集全流程。无图形桌面版Linux(如Ubuntu Server、Raspberry Pi OS Lite)因轻量、资源占用低,是ROS2嵌入式开发的首选系统,但实操中需规避图形界面相关工具的依赖问题。结合实操过程中遇到的5类典型故障(含无图形桌面专属故障),按操作步骤同步嵌入问题分析与解决方案,为ROS2嵌入式开发入门者提供可复现、可落地的实操参考,同时记录实操过程中的技术要点与避坑经验。
一、无图形桌面版Linux核心说明
无图形桌面版Linux(如Ubuntu Server)区别于带GUI的桌面版,核心优势是占用CPU、内存资源少,适合树莓派等嵌入式设备长期运行ROS2节点,但需注意:无图形界面无法使用RViz、Gazebo等可视化工具,也无法通过图形化方式预览摄像头画面,所有操作均通过终端(SSH远程连接优先)完成;图像验证、故障排查需依赖命令行工具,这也是本次实操的核心重点。(建议用vs code的插件ssh 连接树莓派如何连接可以看之前的文章)
二、摄像头驱动适配(实操基础,含故障1)
USB摄像头接入ROS2的核心前提是完成驱动适配,确保系统能正常识别摄像头硬件。本次实操采用通用USB免驱摄像头(符合UVC协议),无图形桌面版Linux的驱动适配流程与桌面版一致,但需通过命令行完成所有验证,具体操作及故障排查如下:
2.1 免驱摄像头驱动适配操作
通用USB免驱摄像头接入树莓派后,系统会自动加载内置驱动,无需手动编译安装,无图形桌面环境下操作流程如下:
-
将USB摄像头接入树莓派空闲USB接口(优先选择USB 3.0接口,提升图像传输速率,避免帧率卡顿);
-
等待系统完成驱动自动加载(约3-5秒,嵌入式系统加载速度略慢,需耐心等待);
-
终端执行设备识别指令,验证摄像头是否被系统成功识别(通常是video0):
ls /dev/video*
同时,可通过v4l2-ctl工具(无图形桌面专用设备查看工具)进一步验证摄像头参数,确保驱动适配正常:
# 安装v4l2-ctl工具(无图形桌面默认未安装)
sudo apt install -y v4l-utils
# 查看摄像头支持的分辨率、格式等参数
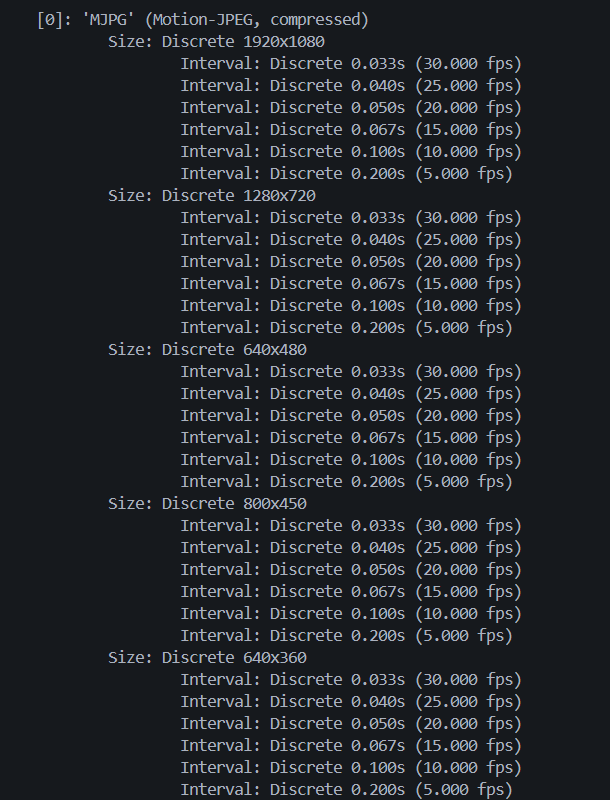
v4l2-ctl --list-formats-ext
#查看指定节点是否为真实摄像头
v4l2-ctl --device=/dev/video0 --list-formats-ext
若输出摄像头支持的分辨率、像素格式等信息,说明该节点(video0)是真实摄像头;
若报错 “Invalid argument”,说明该节点是虚拟节点,更换其他 video 节点重试。
2.2 典型故障1及排查解决方案
❌ 故障现象:摄像头接入后,执行ls /dev/video*指令,仅显示video10、video11等虚拟设备节点,未出现真实摄像头对应的video0节点,摄像头无法被系统识别。
✅ 故障分析:结合树莓派嵌入式系统及无图形桌面特性,排查方向主要为3点:一是USB接口接触不良,二是系统未及时刷新USB设备列表,三是摄像头硬件故障(排除法验证);此外,无图形桌面版系统若未启用摄像头支持,也会导致设备节点缺失。
✅ 解决方案:采用逐步排查法,具体步骤如下:① 断开USB摄像头,重新插拔至树莓派另一个USB接口,确保接触紧密;② 若重新插拔后仍未识别,执行sudo udevadm trigger命令,手动刷新USB设备列表;③ 若刷新后依旧无响应,检查摄像头支持是否启用,执行sudo raspi-config,进入Interface Options → Camera → Yes,选择Finish并重启树莓派;④ 重启后重新接入摄像头,再次执行识别指令,即可成功识别到video0设备节点,完成驱动适配。
2.3 补充:非免驱摄像头驱动适配方案
若使用非UVC协议的非免驱摄像头,需手动安装uvc驱动及相关依赖工具,无图形桌面环境下适配流程如下(通用适配方案):
# 更新系统软件源,确保依赖包可正常获取
sudo apt update
# 安装uvc驱动及视频设备管理工具(无图形桌面专用)
sudo apt install -y v4l-utils uvcdynctrl
# 重新执行设备识别指令,验证驱动适配结果
ls /dev/video*
# 进一步验证摄像头参数
v4l2-ctl --list-formats-ext
三、前期环境准备(规避后续启动故障,含故障2、故障5)
驱动适配完成后,需完成ROS2环境配置、功能包部署及基础目录创建,无图形桌面版Linux需额外注意:避免安装图形化依赖包,所有操作均通过命令行完成,具体准备流程及故障排查如下:
3.1 基础环境准备清单
-
硬件环境:树莓派4B(4GB及以上内存,确保ROS2节点运行流畅)、已完成驱动适配的USB摄像头、SSH远程连接工具(无图形桌面唯一操作方式);
-
软件环境:树莓派预装Ubuntu 22.04 LTS Server(无图形桌面,ARM64架构,对应ROS2 Humble版本)、ROS2 Humble基础环境(已完成初始化配置,无图形桌面版无需安装desktop组件,仅需基础核心组件)、usb_cam功能包(ROS2官方开源摄像头功能包,用于图像采集与话题发布);
-
基础目录创建:提前创建摄像头图像保存目录,避免后续拍照保存时出现路径不存在的报错,终端执行如下指令:
mkdir -p ~/camera_photos3.2 典型故障2及排查解决方案
❌ 故障现象:通过apt命令安装usb_cam功能包时,终端报错“E: Unable to locate package ros-humble-usb-cam”,功能包无法正常获取安装。
✅ 故障分析:树莓派采用ARM64架构,ROS2官方软件源中未提供预编译的usb_cam功能包(仅x86架构支持apt直接安装),且无图形桌面版系统未默认集成该功能包,因此需通过源码编译方式部署功能包;此外,若克隆源码时出现“网页解析失败,可能是不支持的网页类型,请检查网页或稍后重试”报错,说明树莓派无法正常访问GitHub仓库,导致源码无法获取。
✅ 解决方案:源码编译部署usb_cam功能包,针对源码克隆失败问题同步解决,具体步骤如下(严格按照顺序执行,避免编译报错):
# 1. 创建功能包工作空间(规范ROS2功能包管理)
mkdir -p ~/usb_cam_ws/src cd ~/usb_cam_ws/src
# 2. 从ROS官方开源仓库克隆usb_cam源码(若出现网页解析失败,执行备用方案)
# 主方案:直接克隆源码
git clone https://github.com/ros-drivers/usb_cam.git
# 备用方案1:更换国内镜像源克隆(解决网页解析失败、网络不稳定问题)
git clone https://gitee.com/mirrors/ros-drivers-usb_cam.git usb_cam
# 备用方案2:手动下载源码压缩包(无网络或镜像源也可使用)
# 先通过电脑下载源码压缩包
(https://github.com/ros-drivers/usb_cam/archive/refs/heads/ros2.zip)
# 通过scp命令将压缩包上传至树莓派src目录,再解压 unzip ros2.zip -d usb_cam
# 3. 回到工作空间根目录,安装功能包依赖(自动解决依赖缺失问题)
cd .. rosdep install --from-paths src --ignore-src -r -y
# 4. 编译usb_cam功能包(指定功能包编译,提升编译效率,无图形桌面无需编译图形依赖)colcon build --packages-select usb_cam
# 5. 加载功能包环境变量(使ROS2系统识别该功能包)
source ~/usb_cam_ws/install/setup.bash
3.3 典型故障5(无图形桌面专属)及排查解决方案
❌ 故障现象:安装ROS2基础环境时,误安装了desktop组件,导致无图形桌面系统占用过多资源,甚至出现卡顿、无法正常启动ROS2节点的情况。
✅ 故障分析:无图形桌面版Linux无需安装ROS2的desktop组件(该组件包含RViz、Gazebo等图形化工具),误安装会额外占用CPU、内存资源,导致嵌入式设备性能不足,影响摄像头节点运行。
✅ 解决方案:卸载多余的图形化组件,重新安装ROS2核心组件,步骤如下:
# 卸载ROS2 desktop组件(若已误装)
sudo apt remove -y ros-humble-desktop
# 安装ROS2核心组件(无图形桌面专用,仅包含核心功能,轻量无冗余)
sudo apt install -y ros-humble-ros-core
# 重新加载ROS2环境
source /opt/ros/humble/setup.bash
四、核心实操:节点启动+话题验证+图像采集(含故障3、4)
完成驱动适配与环境准备后,进入核心实操环节,无图形桌面版Linux需重点注意:无法通过图形化工具预览图像,需通过话题查询、图像保存等命令行方式验证摄像头工作状态,具体操作及故障排查如下。
4.1 启动usb_cam节点(含故障3)
usb_cam节点是ROS2中实现摄像头图像采集与话题发布的核心,启动节点时需指定摄像头设备节点、图像参数,确保节点正常运行,无图形桌面环境下操作及故障排查如下:
-
终端加载ROS2基础环境与usb_cam功能包环境(每次新开终端均需执行,避免环境变量失效):
source /opt/ros/humble/setup.bash source ~/usb_cam_ws/install/setup.bash
2.启动usb_cam节点,指定摄像头设备节点、图像分辨率、帧率及像素格式(适配树莓派性能,避免帧率过高导致卡顿,无图形桌面无需设置显示参数):
ros2 run usb_cam usb_cam_node_exe --ros-args \
-p video_device:=/dev/video0 \
-p pixel_format:=yuyv422 \
-p framerate:=15.0 \
-p image_size:=[640,480]
4.2 典型故障3及排查解决方案
❌ 故障现象:执行节点启动指令后,终端报错“No such file or directory”,提示无法找到setup.bash文件,节点启动失败。
✅ 故障分析:该故障核心原因有两点:一是功能包编译未完成,未生成install目录及setup.bash文件;二是环境变量加载路径错误,未指向usb_cam功能包的install目录;三是无图形桌面环境下,未重新加载环境变量(每次新开终端均需加载)。
✅ 解决方案:① 回到usb_cam_ws工作空间根目录,重新执行colcon build --packages-select usb_cam命令,确保编译完成(出现“Finished <<< usb_cam”标识);② 重新执行source ~/usb_cam_ws/install/setup.bash命令,确认环境变量加载成功;③ 再次执行节点启动指令,即可成功启动usb_cam节点。
4.3 验证图像话题(确保图像正常发布,无图形桌面专属验证方式)
usb_cam节点启动后,会发布图像话题(/image_raw),无图形桌面环境下无法通过RViz预览,需通过命令行查询话题、查看话题数据,验证图像是否正常采集发布,操作步骤如下:
-
新开终端,加载ROS2环境:source /opt/ros/humble/setup.bash
-
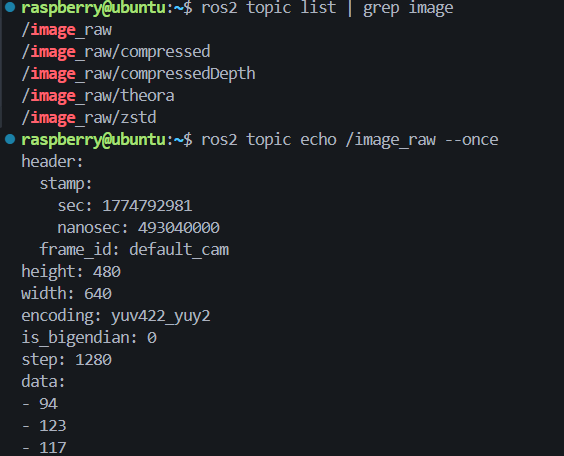
执行话题列表查询指令,筛选图像相关话题:ros2 topic list | grep image
若输出“/image_raw”“/image_raw/compressed”话题,说明摄像头图像采集正常,话题发布成功;进一步查看话题数据(验证图像是否有效):
ros2 topic echo /image_raw --once
若输出图像宽高、像素格式等数据,说明图像采集正常。
4.4 图像采集保存(含故障4,无图形桌面唯一验证方式)
无图形桌面环境下,无法预览摄像头画面,需通过ROS2官方image_saver工具、libcamera工具及Python脚本三种方式实现图像采集与本地保存,验证摄像头实际工作效果,操作步骤及故障排查如下:
4.4.1 方式1:ROS2 image_saver工具(基础方式)
-
在话题验证成功的终端中,执行图像保存指令(指定图像话题及保存路径):
ros2 run image_saver image_saver --ros-args -r image:=/image_raw -p save_path:=~/camera_photos
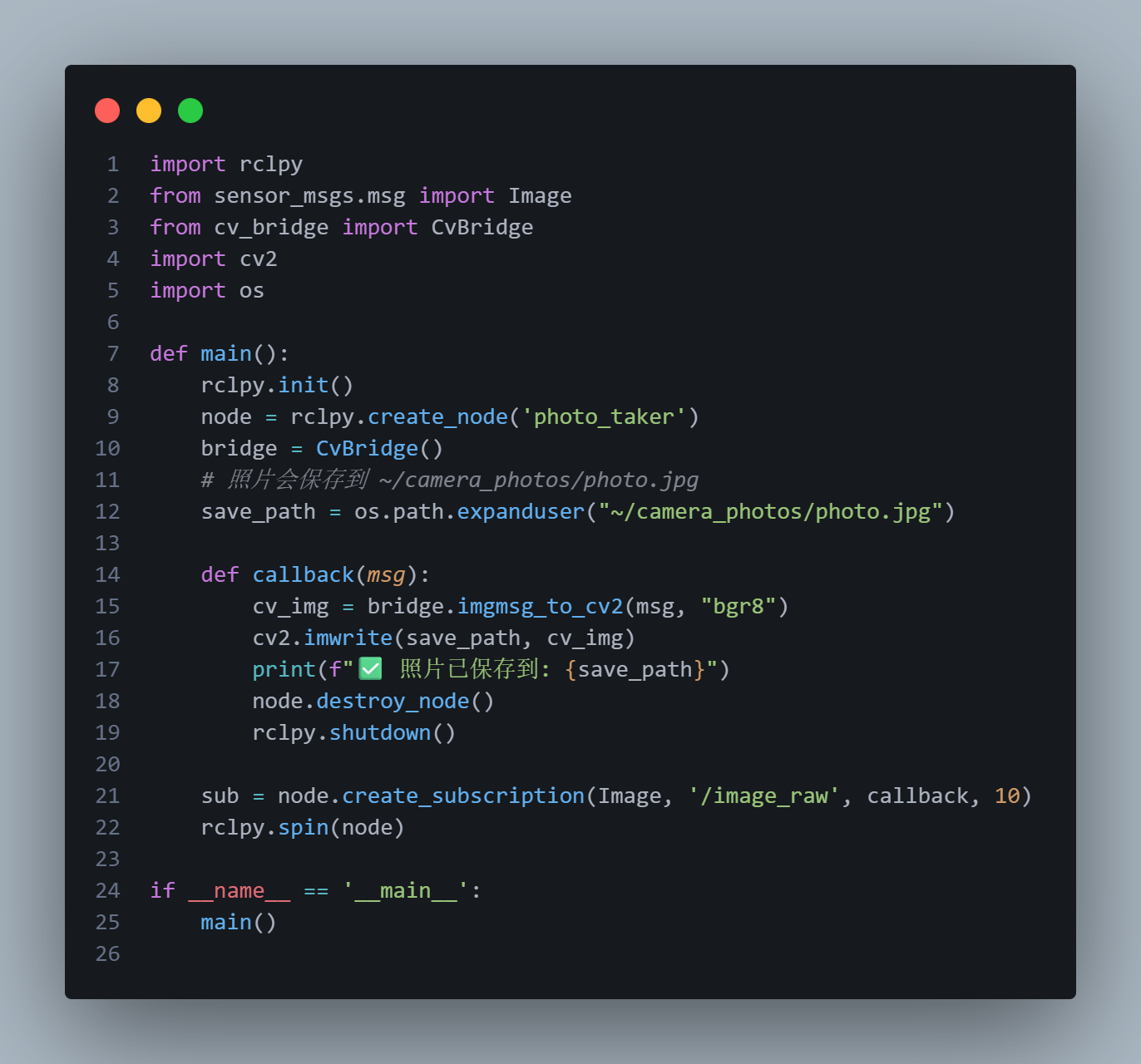
4.4.2 方式3:Python脚本拍照(灵活可控方式,重点补充)
无图形桌面环境下,Python脚本可灵活控制拍照时机、图像分辨率、保存路径,适配后续自动化采集场景,具体操作如下:
-
安装Python依赖库(适配ROS2图像话题解析,无图形桌面专用):
# 安装ROS2 Python图像处理依赖
sudo apt install -y python3-ros2topic python3-opencv python3-numpy
# 确保ROS2 Python环境正常
source /opt/ros/humble/setup.bash2.创建Python拍照脚本(命名为camera_capture.py):
-
赋予脚本执行权限:
-
运行Python脚本(确保usb_cam节点已启动):
python3 take_photo.py
![]()
⚠️ 脚本关键注意事项:① 脚本依赖ROS2的rclpy、cv_bridge库,必须提前安装且加载ROS2环境;② 订阅的话题需与usb_cam节点发布的话题一致(默认是/image_raw),若修改了节点话题参数,需同步修改脚本中的话题名称;③ 无图形桌面环境下,cv2无需启用窗口预览,脚本中已屏蔽预览相关代码,避免报错;④ 可根据需求修改脚本(如设置定时拍照、按条件拍照、调整图像分辨率等)。
-
查看所有方式的保存结果:
ls ~/camera_photos4.5 典型故障4及排查解决方案
❌ 故障现象:执行图像保存指令(含Python脚本)后,终端报错“Permission denied”,无法保存图像至指定目录。
✅ 故障分析:该故障为目录权限不足导致,树莓派默认用户对自定义目录无写入权限,无图形桌面环境下无法通过图形化方式修改权限,需通过命令行手动赋予目录写入权限。
✅ 解决方案:终端执行权限赋予指令,为camera_photos目录添加写入权限:
chmod 777 ~/camera_photos权限赋予完成后,重新执行图像保存指令(或Python脚本),即可成功将图像保存至指定目录;若Python脚本报错“ImportError: No module named 'cv_bridge'”,需重新安装cv_bridge依赖:sudo apt install -y python3-cv-bridge;若报错“无法连接到ROS2节点”,需确认usb_cam节点已启动且环境变量加载正常。
五、无图形桌面版Linux专属优化与注意事项
-
资源优化:无图形桌面版Linux可禁用不必要的服务,进一步降低资源占用,确保ROS2节点流畅运行,执行指令:sudo systemctl disable lightdm(若存在)、sudo systemctl disable gdm3(若存在),避免图形化服务后台运行。
-
开机自启:无图形桌面环境下,可将usb_cam节点、ROS2环境加载指令添加至.bashrc文件,实现开机自动加载环境、启动节点,无需手动执行:echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc、echo "source ~/usb_cam_ws/install/setup.bash" >> ~/.bashrc;若需Python脚本开机自启,可将脚本运行指令添加至.bashrc。
-
故障排查:无图形桌面下所有故障均需通过命令行排查,常用工具:v4l2-ctl(摄像头参数查看)、ros2 topic echo(话题数据查看)、dmesg | grep video(摄像头驱动日志查看)、libcamera-detect(摄像头硬件检测);Python脚本报错可通过终端输出日志定位问题(如依赖缺失、话题不匹配等)。
-
网络配置:无图形桌面版系统需提前配置静态IP,方便后续SSH远程连接,避免IP变动导致无法操作。
六、实操总结与技术要点
本次树莓派+ROS2摄像头接入实操(无图形桌面版Linux),核心完成了驱动适配、功能包源码编译、节点启动、话题验证及图像采集全流程,解决了5类典型故障(含2类无图形桌面专属故障),补充了Python脚本拍照方式,核心技术要点总结如下:
-
驱动适配:免驱摄像头优先依赖系统自动加载驱动,未识别时优先排查USB接触、设备刷新、摄像头支持启用;非免驱摄像头需手动安装uvc驱动,无图形桌面下使用v4l2-ctl工具验证适配结果。
-
功能包部署:树莓派ARM64架构需通过源码编译部署usb_cam功能包,克隆源码时若出现网页解析失败,可使用国内镜像源或手动下载压缩包;无图形桌面无需编译图形依赖,提升编译效率。
-
无图形桌面适配:所有操作均通过终端完成,避免安装图形化组件,图像验证依赖话题查询、图像保存及libcamera工具,新增的Python脚本可实现灵活拍照,适配自动化场景,权限修改、环境加载需严格执行命令行指令。
-
故障排查:节点启动失败优先检查环境变量加载及功能包编译状态;图像保存失败优先排查目录权限;话题无输出优先检查节点是否正常运行;无图形桌面专属故障重点排查图形化组件、摄像头支持启用状态;Python脚本报错优先排查依赖库安装及ROS2环境加载。
-
性能优化:树莓派嵌入式性能有限,启动节点时需合理设置图像分辨率(640x480)及帧率(15fps),禁用不必要的服务,确保节点长期稳定运行;Python脚本可优化队列大小、拍照频率,避免占用过多资源。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)