从Nordic nRF51822芯片到智能手环开发全解析
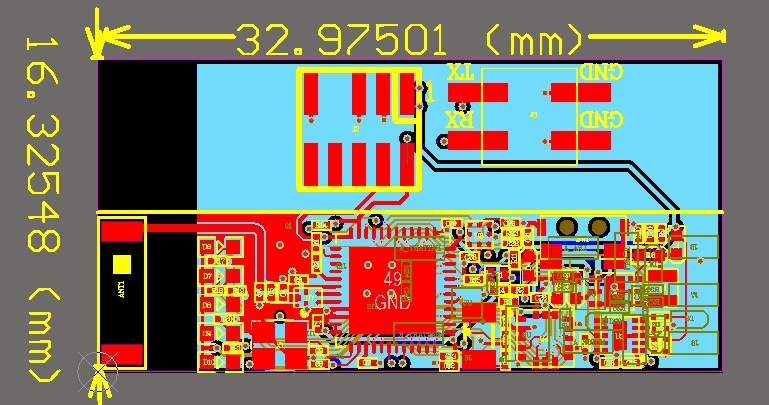
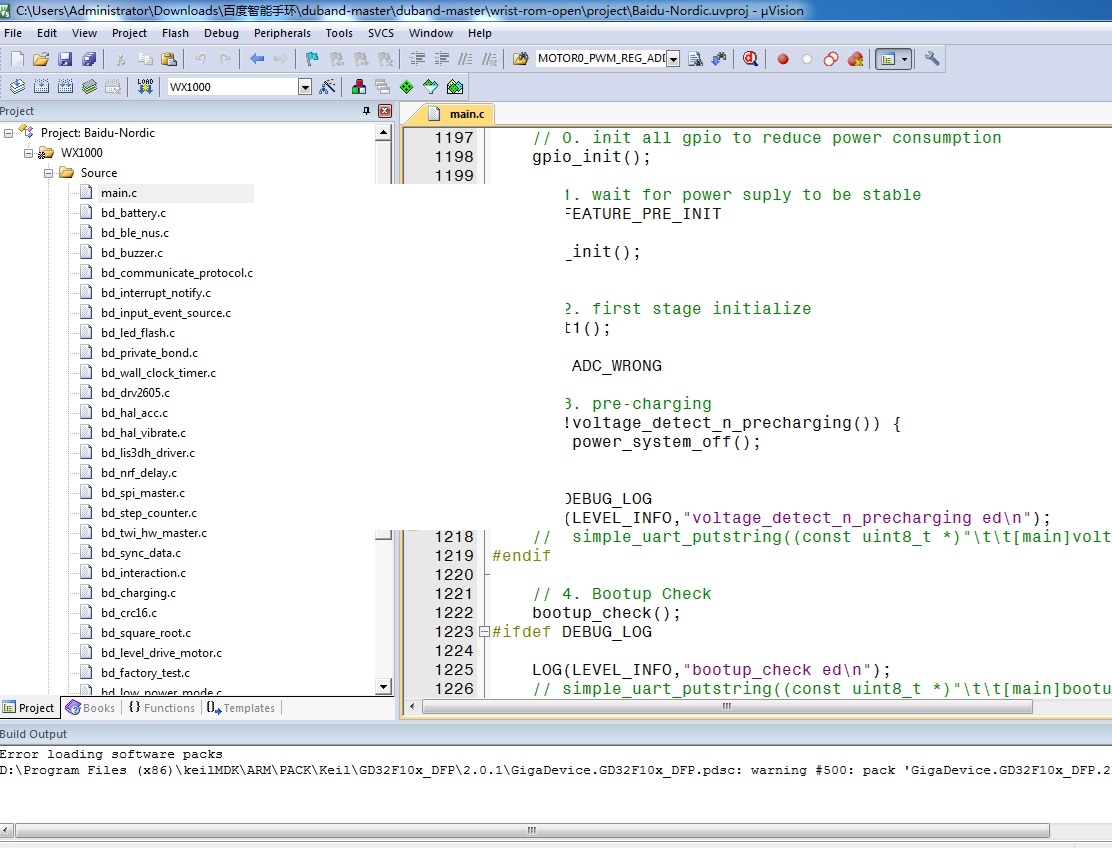
已经量产的产品,不是玩具。 Nordic公司nRF51822芯片开发,芯片集成BLE蓝牙4.0协议。 使用LIS3DH作为加速度传感器,进行运动和睡眠监测。 手环的PCBA部分,主要包括一颗集成BLE功能的MCU,以及由MCU控制的各种外设: 蓝牙射频电路; 使用SPI接口的G-sensor; 使用I2c接口的线性马达驱动电路; 使用I2c接口的LED点阵驱动,与线性马达公用总线; 使用GPIO的按键输入; 使用GPIO的LED灯; 使用GPIO的普通马达驱动电路; 外部复位电路。 智能手环可具备的主要功能有: 运动计步(含里程、卡路里计算); 睡眠监测; 时间显示; 久坐提醒; 来电提醒; 闹钟; 手机防丢(手机与手环双向防丢); 遥控拍照(需要手机系统配套支持); 手机解锁(需要手机系统配套支持) 原理图,源码,一起送上。

在硬件开发领域,当我们谈论已经量产的产品时,那可不是简单的玩具,而是凝聚着技术与工程实践的结晶。今天就来聊聊基于Nordic公司nRF51822芯片的智能手环开发,这芯片可是集成了BLE蓝牙4.0协议,为整个手环的无线通信奠定了基础。
硬件架构:PCBA部分剖析
手环的PCBA部分是核心所在,主要由一颗集成BLE功能的MCU以及它所控制的各种外设组成。
蓝牙射频电路
这部分负责手环与外部设备的蓝牙通信,nRF51822芯片自带的BLE蓝牙4.0协议让它在低功耗通信方面表现出色。在代码层面,初始化蓝牙相关功能可能会像下面这样:
// 假设使用Nordic官方SDK
#include "ble.h"
#include "ble_advdata.h"
ble_advdata_t advdata;
ble_adv_modes_config_t adv_modes;
void bluetooth_init() {
// 初始化蓝牙协议栈
err_code = ble_stack_init();
APP_ERROR_CHECK(err_code);
// 设置广播数据
memset(&advdata, 0, sizeof(advdata));
advdata.name_type = BLE_ADVDATA_FULL_NAME;
memcpy(advdata.p_data, "MySmartBand", strlen("MySmartBand"));
advdata.include_appearance = true;
advdata.appearance = BLE_APPEARANCE_GENERIC_WATCH;
// 设置广播模式
memset(&adv_modes, 0, sizeof(adv_modes));
adv_modes.ble_adv_fast_enabled = true;
adv_modes.ble_adv_fast_interval = BLE_GAP_ADV_INTERVAL_100MS;
adv_modes.ble_adv_fast_timeout = 0;
// 启动广播
err_code = ble_adv_start(&advdata, &adv_modes);
APP_ERROR_CHECK(err_code);
}SPI接口的G - sensor(LIS3DH加速度传感器)
我们使用LIS3DH作为加速度传感器来进行运动和睡眠监测。SPI接口用于MCU与LIS3DH之间的数据传输。在代码中读取加速度数据大概是这样:
#include "lis3dh.h"
// 假设SPI相关宏定义已设置好
void read_accelerometer_data(int16_t *x, int16_t *y, int16_t *z) {
uint8_t buffer[6];
// 通过SPI读取LIS3DH的加速度数据寄存器
spi_transfer(LIS3DH_ADDR | 0x80, buffer, 6);
*x = (int16_t)(buffer[1] << 8 | buffer[0]);
*y = (int16_t)(buffer[3] << 8 | buffer[2]);
*z = (int16_t)(buffer[5] << 8 | buffer[4]);
}I2c接口的外设
- 线性马达驱动电路
- LED点阵驱动(与线性马达公用总线)
I2C总线让多个设备可以共用一条通信线路。例如初始化I2C设备可能是这样:
#include "i2c.h"
void i2c_init() {
// 配置I2C引脚
nrf_gpio_cfg_output(SCL_PIN);
nrf_gpio_cfg_output(SDA_PIN);
// 初始化I2C模块
i2c_config_t config = {
.scl = SCL_PIN,
.sda = SDA_PIN,
.frequency = NRF_TWIM_FREQ_100K,
.interrupt_priority = APP_IRQ_PRIORITY_LOW
};
err_code = nrf_drv_twi_init(&twi_instance, &config, twi_event_handler, NULL);
APP_ERROR_CHECK(err_code);
nrf_drv_twi_enable(&twi_instance);
}GPIO相关外设
- 按键输入
- LED灯
- 普通马达驱动电路
GPIO口就像MCU的触手,灵活控制各种简单设备。以按键输入为例,代码可能是这样:
// 假设按键连接到GPIO_PIN
void button_init() {
nrf_gpio_cfg_input(GPIO_PIN, NRF_GPIO_PIN_PULLUP);
}
bool is_button_pressed() {
return nrf_gpio_pin_read(GPIO_PIN) == 0;
}外部复位电路
虽然代码层面不太涉及,但外部复位电路是保障系统稳定运行的关键。当系统出现异常时,复位电路可以让MCU重新启动,回到初始状态。
智能手环功能实现
运动计步(含里程、卡路里计算)
利用加速度传感器的数据,通过算法识别步伐,进而计算里程和卡路里消耗。例如简单的计步算法:
// 假设已有加速度数据x, y, z
#define THRESHOLD 500
static int step_count = 0;
static bool is_step = false;
void calculate_steps(int16_t x, int16_t y, int16_t z) {
int magnitude = (x * x + y * y + z * z);
if (magnitude > THRESHOLD &&!is_step) {
step_count++;
is_step = true;
} else if (magnitude <= THRESHOLD) {
is_step = false;
}
}睡眠监测
同样依靠加速度传感器,分析睡眠时身体的活动状态来判断睡眠质量,这部分算法相对复杂,可能需要结合一段时间内的加速度数据变化。
时间显示
可以通过RTC(实时时钟)模块获取时间,然后在显示屏上显示。
久坐提醒、来电提醒、闹钟
这些功能基于系统的定时机制和相应的外设反馈(如震动马达、LED灯等)。比如久坐提醒:
// 假设设定每30分钟提醒一次
#define SEDENTARY_TIME 30 * 60 * 1000
static uint32_t last_activity_time = 0;
void sedentary_reminder() {
uint32_t current_time = app_timer_cnt_get();
if (current_time - last_activity_time > SEDENTARY_TIME) {
// 触发提醒,如震动马达震动
trigger_vibration();
last_activity_time = current_time;
}
}手机防丢(手机与手环双向防丢)、遥控拍照、手机解锁
这些功能依赖于蓝牙通信和手机系统的配套支持。在蓝牙连接状态下,通过特定的指令交互实现相应功能。
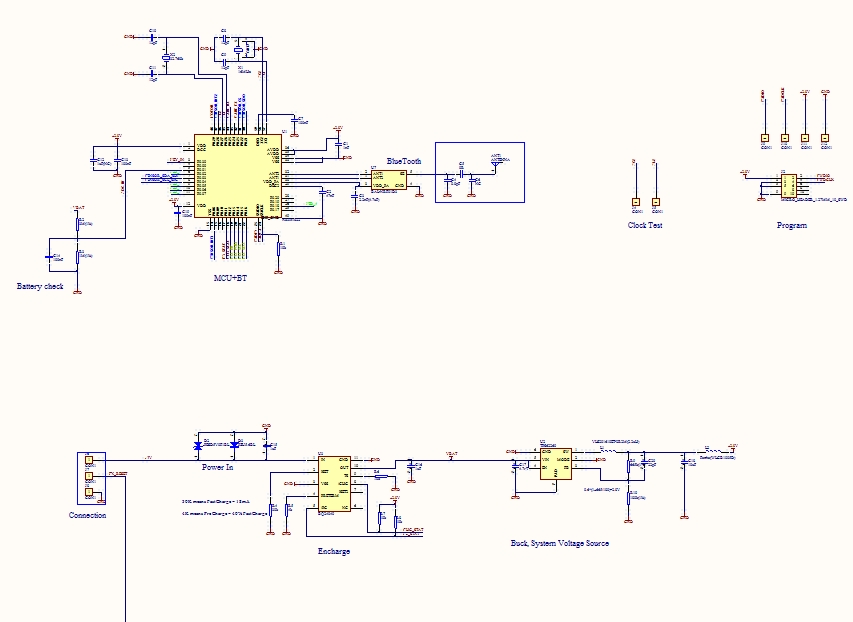
已经量产的产品,不是玩具。 Nordic公司nRF51822芯片开发,芯片集成BLE蓝牙4.0协议。 使用LIS3DH作为加速度传感器,进行运动和睡眠监测。 手环的PCBA部分,主要包括一颗集成BLE功能的MCU,以及由MCU控制的各种外设: 蓝牙射频电路; 使用SPI接口的G-sensor; 使用I2c接口的线性马达驱动电路; 使用I2c接口的LED点阵驱动,与线性马达公用总线; 使用GPIO的按键输入; 使用GPIO的LED灯; 使用GPIO的普通马达驱动电路; 外部复位电路。 智能手环可具备的主要功能有: 运动计步(含里程、卡路里计算); 睡眠监测; 时间显示; 久坐提醒; 来电提醒; 闹钟; 手机防丢(手机与手环双向防丢); 遥控拍照(需要手机系统配套支持); 手机解锁(需要手机系统配套支持) 原理图,源码,一起送上。
最后,原理图和源码都已备好,希望这篇博文能给大家在智能手环开发上带来一些启发和帮助,让大家能基于这些知识,进一步探索和实现更强大的功能。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)